【无人机】MavLink通讯协议的回调解析函数及状态机
【无人机】MavLink通讯协议的回调解析函数及状态机
文章目录
- MavLink
- MavLink解析函数
- 回调函数状态机
- 附录:crazyfile固件代码功能解读及其线程调度
- 线程分配
- 1. 主线程systemTask
- 2. 主要线程或循环任务
- 主要线程及其功能
- 1. stabilizerTask
- 2. kalmanTask(estimatorKalmanTask)
- 3. CRTP(crtpTask、commTask、commanderTask)
- crtpTask
- commTask
- commanderTask
- 4. proximityTask
- 5. zRangerTask(这里用的是zRanger2Task)
- zRangeTask
- zRanger2Task
- 6. passthroughTask
- 7. appTask(未定义)
- 主要模块功能说明
- 1. MCU驱动层
- 2. 抽象层
- 3. CRTP通讯协议
- 4. DECK
- 5. 电机驱动
- 6. syslink
- 7. radiolink
- 8. NRF51
- 主要传感器及其模块
- 1. IMU BMI088(SPI)
- 初始化阶段关键寄存器操作
- 数据采集阶段关键寄存器
- 2. 气压传感器BMP388(BMP3XX)
- 初始化阶段关键寄存器操作
- 数据采集阶段关键寄存器
- 3. 光流PMW3901
- 4. ToF距离传感器VL53L1X
- 传感器模块的应用
- BMI088和BMP388(sensors)
- 1. 硬件接口层 (sensors_bmi088_spi.c)
- 2. 数据抽象层 (sensors.c)
- 3. 控制应用层
- 4. 开发聚焦点
- 光流PMW3901(flowdeck_v1v2)
- 1. 数据采集与预处理
- 2. 测量值封装
- 3. 状态估计集成
- 4. 可配置性
- 5. 关键函数链
- 6. 硬件接口层 (flowdeck_v1v2.c)
- 7. 数据抽象层
- 8. 控制应用层
- 9. 开发聚焦点
- 多距离VL53L1X (multiranger)
- 1. 传感器功能实现
- 2. 应用场景
- 3. 硬件接口层
- 4. 数据处理层
- 5. 控制应用层
- 6. 关键函数链
- 7. 开发聚焦点
- 8. 方向应用
- 下方向VL53L1X (zranger2_deck)
- 1. 功能实现
- 2. 与其他数据的融合
- 3. 硬件接口层
- 4. 数据处理层
- 5. 控制应用层
- 6. 开发聚焦点
MavLink
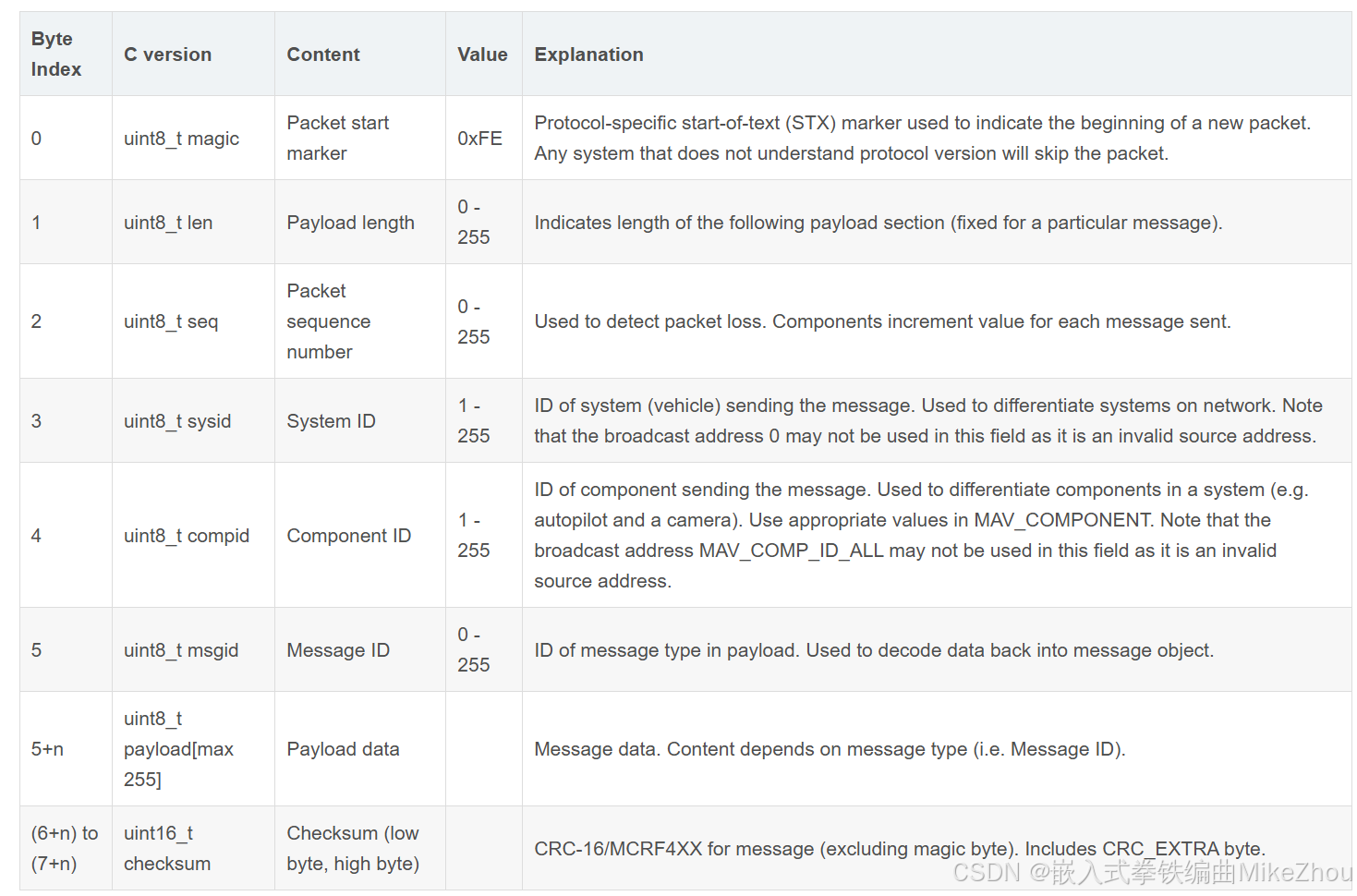
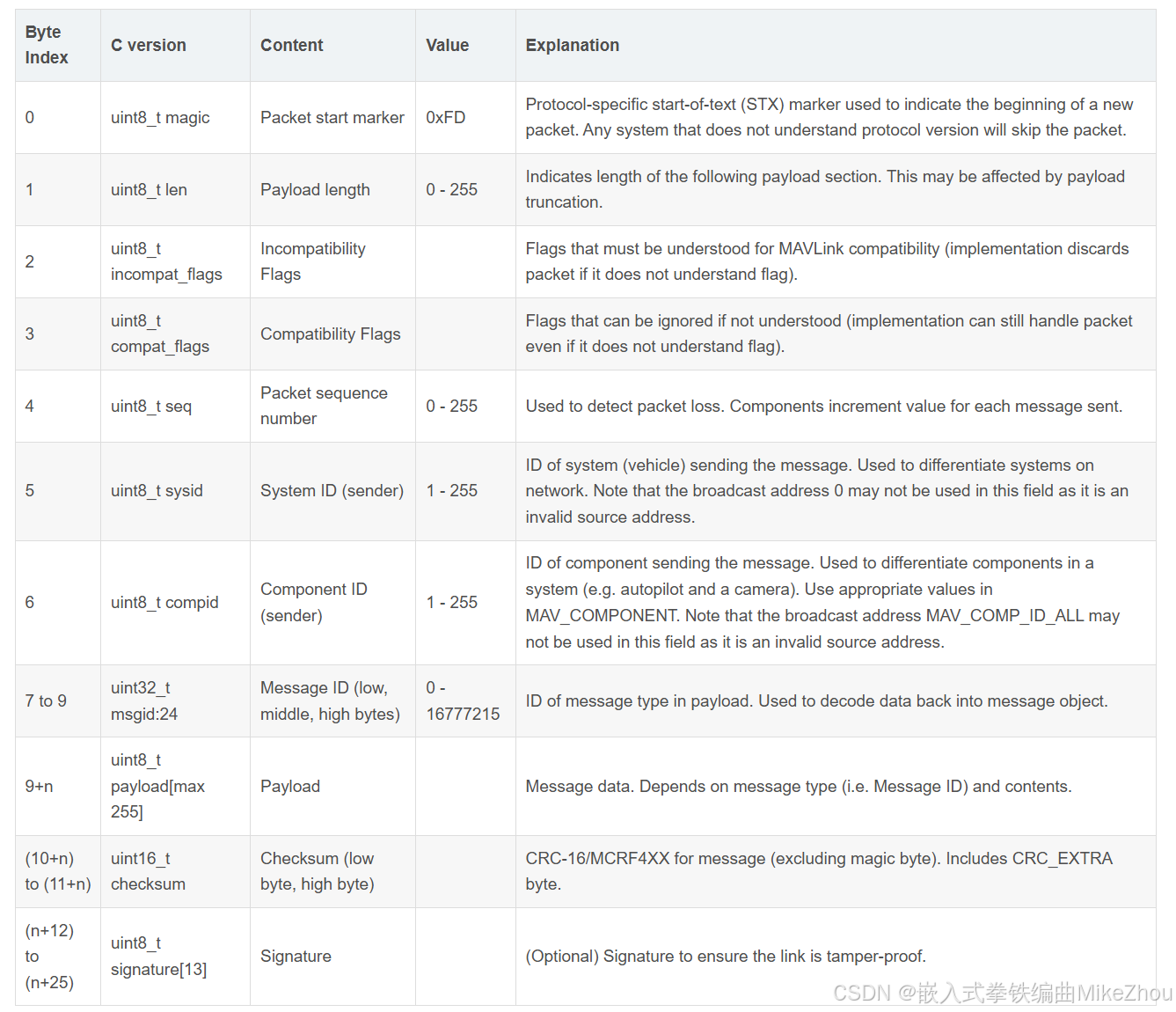
MavLink是一种常用于无人机通讯领域的协议栈
开源链接
其常用1.0和2.0协议栈数据结构如下:


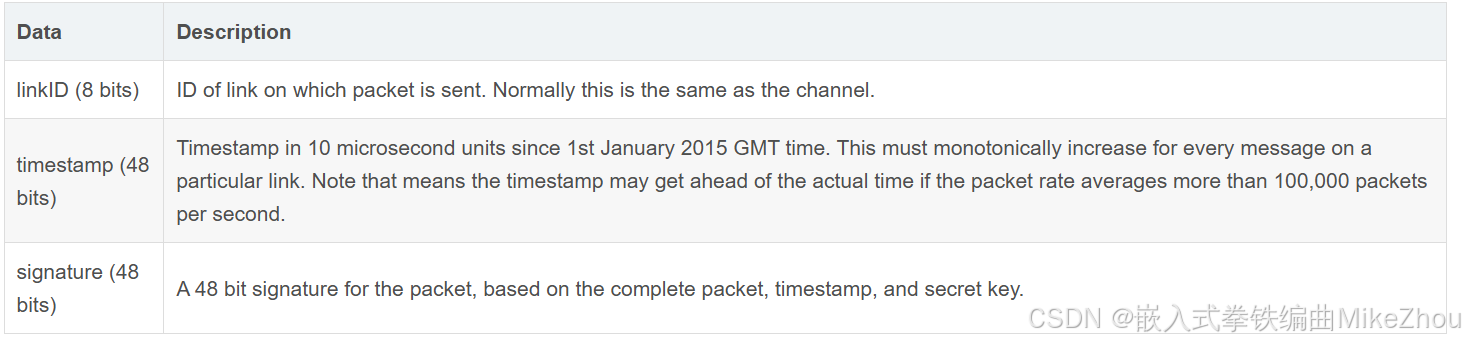
签名报文格式:

MavLink解析函数
在官方提供的API中 常用mavlink_parse_char函数进行解析
/*** This is a convenience function which handles the complete MAVLink parsing.* the function will parse one byte at a time and return the complete packet once* it could be successfully decoded. This function will return 0 or 1.** Messages are parsed into an internal buffer (one for each channel). When a complete* message is received it is copies into *r_message and the channel's status is* copied into *r_mavlink_status.** @param chan ID of the channel to be parsed.* A channel is not a physical message channel like a serial port, but a logical partition of* the communication streams. COMM_NB is the limit for the number of channels* on MCU (e.g. ARM7), while COMM_NB_HIGH is the limit for the number of channels in Linux/Windows* @param c The char to parse** @param r_message NULL if no message could be decoded, otherwise the message data* @param r_mavlink_status if a message was decoded, this is filled with the channel's stats* @return 0 if no message could be decoded or bad CRC, 1 on good message and CRC** A typical use scenario of this function call is:** @code* #include <mavlink.h>** mavlink_status_t status;* mavlink_message_t msg;* int chan = 0;*** while(serial.bytesAvailable > 0)* {* uint8_t byte = serial.getNextByte();* if (mavlink_parse_char(chan, byte, &msg, &status))* {* printf("Received message with ID %d, sequence: %d from component %d of system %d", msg.msgid, msg.seq, msg.compid, msg.sysid);* }* }*** @endcode*/
MAVLINK_HELPER uint8_t mavlink_parse_char(uint8_t chan, uint8_t c, mavlink_message_t* r_message, mavlink_status_t* r_mavlink_status)
{uint8_t msg_received = mavlink_frame_char(chan, c, r_message, r_mavlink_status);if (msg_received == MAVLINK_FRAMING_BAD_CRC ||msg_received == MAVLINK_FRAMING_BAD_SIGNATURE) {// we got a bad CRC. Treat as a parse failuremavlink_message_t* rxmsg = mavlink_get_channel_buffer(chan);mavlink_status_t* status = mavlink_get_channel_status(chan);_mav_parse_error(status);status->msg_received = MAVLINK_FRAMING_INCOMPLETE;status->parse_state = MAVLINK_PARSE_STATE_IDLE;if (c == MAVLINK_STX){status->parse_state = MAVLINK_PARSE_STATE_GOT_STX;rxmsg->len = 0;mavlink_start_checksum(rxmsg);}return 0;}return msg_received;
}在这里 官方提供的方式就是每次往这个函数输入一个字节 直到返回1表示解析成功
回调函数状态机
为了每次不占用主线程 且保证接收正常、兼容MCU等串口回调方式
可以使用状态机来进行
状态机V2版本可为:
static uint8_t mavlink_callback_status = 0;
static uint32_t mavlink_callback_flag = 0;
static uint8_t mavlink_callback_buf[512]={0};void reset_mavlink_callback(void)
{mavlink_callback_status = 0;mavlink_callback_flag = 0;memset(mavlink_callback_buf,0,sizeof(mavlink_callback_buf));
}uint32_t mavlink_callback(uint8_t dat)
{switch (mavlink_callback_status) {case 0:{if(dat == 0xFD){mavlink_callback_buf[0] = dat;mavlink_callback_flag = 1;mavlink_callback_status = 1;}break;}case 1: // 读取载荷长度{mavlink_callback_buf[mavlink_callback_flag] = dat;mavlink_callback_flag++;// 检查消息总长度是否合法 (10字节头尾 + 载荷 + 2字节校验)if(10 + dat + 2 > sizeof(mavlink_callback_buf)) {reset_mavlink_callback();return 0;}mavlink_callback_status = 2;break;}case 2: case 3: case 4: {mavlink_callback_buf[mavlink_callback_flag] = dat;mavlink_callback_flag++;mavlink_callback_status++;break;}case 5: case 6: {if(!dat){reset_mavlink_callback();break;}}case 7: case 8: case 9: {mavlink_callback_buf[mavlink_callback_flag] = dat;mavlink_callback_flag++;mavlink_callback_status++;break;}case 10: // 处理有效载荷{mavlink_callback_buf[mavlink_callback_flag] = dat;mavlink_callback_flag++;// 检查是否完成载荷接收if(mavlink_callback_flag >= 10 + mavlink_callback_buf[1]) {mavlink_callback_status = 11;}break;}case 11: // 校验和低字节case 12: // 校验和高字节{mavlink_callback_buf[mavlink_callback_flag] = dat;mavlink_callback_flag++;mavlink_callback_status++;if(mavlink_callback_status > 12) {return mavlink_callback_flag; // 完整帧接收完成}break;}default:reset_mavlink_callback();break;}// 安全边界检查if(mavlink_callback_flag >= sizeof(mavlink_callback_buf)) {reset_mavlink_callback();return 0;}return 0;
}如果是V1版本 则需要改起始位 以及后面的状态机移位
调用方法:
if(n>0){printf("\nnum:%d size:%d : \n",row,n);uint32_t mavlink_len = 0;mavlink_message_t pos_msg;mavlink_status_t status;for (ssize_t i = 0; i < n; i++){mavlink_len = mavlink_callback(read_buf[i]);if(mavlink_len){for (ssize_t j = 0; j < mavlink_len; j++){if (mavlink_parse_char(MAVLINK_COMM_0, mavlink_callback_buf[j], &pos_msg, &status)){if (pos_msg.msgid == MAVLINK_MSG_ID_POSITION_ESTIMATE){mavlink_position_estimate_t position_estimate;mavlink_msg_position_estimate_decode(&pos_msg, &position_estimate);printf("mcu: %lu us, yaw = %.5f\n",position_estimate.usec, position_estimate.yaw);dxfAttitude.pitch = position_estimate.pitch;dxfAttitude.roll = position_estimate.roll;dxfAttitude.yaw = position_estimate.yaw;}}}reset_mavlink_callback();}}}
附录:crazyfile固件代码功能解读及其线程调度
在无人机开源领域 有个名为crazyfile的无人机软件架构
地址为:github.com/bitcraze/crazyflie-firmware
线程分配
1. 主线程systemTask
main函数建立主线程systemTask,该线程完成了其他各线程的初始化及调度。
默认主要实现的功能:
- LED初始化
- 定时器初始化
- I2C初始化
- 透传初始化及其线程分配
- high-levels modules初始化及其线程分配
- 卡尔曼滤波器初始化及其线程分配
- 内存初始化
- 系统链路数据包接收队列开启及其扩展板子系统初始化
- SoundTimer软件定时器
- CRTP内存队列模块初始化及其内存管理线程
- 系统各模块测试及其log信息打印
- 测试通过则开启系统、使能看门狗等,随后进入到workerLoop
- 测试未通过则重新进行systemTest,若通过,可使用systemTest强制启动;若未通过则亮红灯,并进入到workerLoop
其余几项由宏定义选择性调用: - 队列监控软件定时器
- 串口1的debug打印初始化
- errorUkfTask线程,误差状态无迹卡尔曼滤波器初始化
- proximity线程,靠近传感器及滑动窗口初始化
2. 主要线程或循环任务
| 线程名称 | 优先级或循环时间 | 创建函数 | 宏定义选择开启 | 功能描述 | 所属分类 |
|---|---|---|---|---|---|
| systemTask | SYSTEM_TASK_PRI | systemLaunch | - | 系统主控线程,负责总初始化流程 | 主线程 |
| usblinkTask | USBLINK_TASK_PRI | usblinkInit | - | USB通信协议处理 | 基础服务线程 |
| sysLoadTask | TIMER_PERIOD(默认1000) | sysLoadInit | - | 系统负载监控 | - |
| crtpTask (crtpTxTask、crtpRxTask) | CRTP_TX_TASK_PRI CRTP_RX_TASK_PRI | crtpInit | - | CRTP服务 | 通信协议栈 |
| commTask (crtpSrvTask、platformSrvTask、syslinkTask、paramTask) | CRTP_SRV_TASK_PRI PLATFORM_SRV_TASK_PRI SYSLINK_TASK_PRI PARAM_TASK_PRI | commInit | - | CRTP无线通信协议处理 | - |
| commanderTask (crtpCommanderHighLevelTask) | CMD_HIGH_LEVEL_TASK_PRI | commanderInit | - | 遥控指令解析与分发 | - |
| proximityTask | PROXIMITY_TASK_PRI | proximityInit | PROXIMITY_ENABLED | 接近传感器数据处理 | 传感器处理线程 |
| estimatorKalmanTask (kalmanTask) | KALMAN_TASK_PRI | estimatorKalmanTaskInit | CONFIG_ESTIMATOR_KALMAN_ENABLE | 卡尔曼滤波算法 | 核心算法线程 |
| errorUkfTask | ERROR_UKF_TASK_PRI | errorEstimatorUkfTaskInit | CONFIG_ESTIMATOR_UKF_ENABLE | UKF估计算法 | - |
| memTask | MEM_TASK_PRI | crtpMemInit | - | 内存管理服务 | 设备管理 |
| stabilizerTask | STABILIZER_TASK_PRI | stabilizerInit | - | 姿态稳定控制 | - |
| passthroughTask | PASSTHROUGH_PRI | passthroughInit | - | 电机电调烧录控制 | 扩展模块 |
| appTask | CONFIG_APP_PRIORITY | appInit | CONFIG_APP_ENABLE | 用户应用(未定义) | - |
| zRangerTask (zRanger2Task) | ZRANGER_TASK_PRI (ZRANGER2_TASK_PRI) | zRangerInit (由DECK_DRIVER注册) (zRanger2Init) | - | 激光测距扩展板 | - |
| SoundTimer | 10ms | soundInit | - | 蜂鸣器音效控制 | 定时器任务 |
| queueMonitorTimer | TIMER_PERIOD(默认1000) | queueMonitorInit | CONFIG_DEBUG_QUEUE_MONITOR | 队列监控 | - |
主要线程及其功能
1. stabilizerTask
飞控系统控制相关的核心线程。
在系统启动同步后进入1kHz实时控制循环,首先通过sensorsWaitDataReady()等待IMU传感器数据就绪,调用sensorsAcquire()获取加速度计/陀螺仪原始数据;随后进行状态估计(stateEstimator()解算飞行姿态)、处理遥控指令生成设定点(commanderGetSetpoint()),通过安全监控模块(supervisorUpdate())检查电池/通信状态,调用PID控制算法(controller())计算电机推力,执行带电压补偿的PWM输出(controlMotors());最后压缩日志数据(compressState())并通过xSemaphoreGive()释放信号量触发频率监控任务(rateSupervisorTask),同时处理避障指令覆盖和异常状态急停,完成从数据采集到电机驱动的全闭环控制。
这里会建立一个子线程rateSupervisorTask:飞控系统的稳定器循环监控线程,在系统启动后创建监控信号量(xRateSupervisorSemaphore),通过阻塞等待实时监测稳定器主循环(1000Hz)的执行间隔,当检测到超时(2秒未执行)或频率偏移(±3Hz)时触发系统警告,并通过断言强制停机保障飞行安全,同时智能区分传感器暂停状态(isSensorsSuspended)避免误报警
如果开启避障功能,proximityTask线程会进行近距离测量,在stabilizerTask线程中会调用collisionAvoidanceUpdateSetpoint,进行避障操作。
2. kalmanTask(estimatorKalmanTask)
飞控系统的卡尔曼滤波核心线程。
在系统启动后进入实时状态估计循环,首先通过xSemaphoreTake()等待来自稳定器线程的信号量触发计算周期,获取加速度计和陀螺仪的子采样数据(axis3fSubSamplerFinalize),执行卡尔曼预测步骤(kalmanCorePredict)推算飞行器状态;随后处理队列中的多源测量数据(TDOA/光流/TOF等),调用kalmanCoreUpdateWith*系列函数进行测量更新;最后通过协方差检查(kalmanSupervisorIsStateWithinBounds)确保估计值有效性,并通过互斥锁保护将最终状态(kalmanCoreExternalizeState)输出给稳定器线程。整个流程严格控制在100Hz频率,实现从传感器原始数据到高精度姿态/位置估计的实时解算。
3. CRTP(crtpTask、commTask、commanderTask)
crtpTask
实时传输协议(CRTP)的初始化核心。
在系统启动阶段创建双线程通信架构(TX/RX任务),初始化全局发送队列(txQueue)和端口接收队列(queues[16]),建立基于优先级队列的通信调度机制,为后续无线/USB等通信链路提供协议栈支持,同时集成统计模块实时监控数据吞吐量。
这里建立了两个子线程,crtpTxTask和crtpRxTask。
- crtpTxTask:CRTP 协议栈的数据发送核心线程。从全局发送队列(txQueue)阻塞接收待发送数据包,通过动态绑定的通信链路(无线电/USB)执行数据发送,在链路拥塞时自动进行10ms间隔重试,同时统计发送速率并通过日志系统实时上报,保障控制指令和日志数据的可靠传输。
- crtpRxTask:CRTP 协议栈的数据接收核心线程。通过动态绑定的通信链路(无线电/USB)持续接收数据包,根据端口号(p.port)将数据包分发至对应接收队列(queues[16])或触发注册的回调函数(callbacks[16]),同时统计接收速率并通过日志系统实时上报,实现多通道数据解耦处理。
commTask
飞控系统的通信调度核心线程。
在系统启动时初始化多协议通信栈(CRTP/USB/Radio),建立与地面站/遥控器的无线连接,通过优先级调度管理控制指令(CRTP包)、参数同步、日志传输等多类数据流。其实时监听UART/2.4GHz无线电等硬件接口,解析并分发来自外部的飞行控制指令至指挥官模块,同时将传感器数据/状态信息通过压缩协议回传地面站,并处理通信中断时的故障切换逻辑。
这里新建了四个线程,分别为crtpSrvTask、platformSrvTask、syslinkTask、paramTask。
- crtpSrvTask:CRTP 协议服务核心线程,在系统启动后创建专用通信队列(CRTP_PORT_LINK),通过阻塞式接收(crtpReceivePacketBlock)监听来自地面站的 CRTP 指令包,根据数据包通道类型执行回显测试(Echo)、设备标识查询(Source)或数据接收黑洞(Sink)操作。其实时处理链路层控制指令,支持通过 echoDelay 参数动态配置回显延迟,并通过互斥锁保障多线程通信安全,完整实现 CRTP 协议的基础服务功能。
- platformSrvTask:飞控系统的平台服务核心线程,在系统启动后创建专用服务端口(CRTP_PORT_PLATFORM),通过阻塞式接收(crtpReceivePacketBlock)监听来自地面站的平台控制指令,根据数据包通道类型执行射频模式设置(ContinuousWave)、系统上电状态管理(armSystem)、固件版本查询(versionCommand)等关键操作。其实时处理硬件级控制请求,并通过Syslink协议与底层硬件交互,保障系统安全状态切换和平台信息透明化。
- syslinkTask:飞控系统的无线通信核心线程。在系统启动后创建专用通信队列,通过阻塞接收(uartslkGetPacketBlocking)持续监听NRF51协处理器发来的Syslink协议数据包,根据协议头(SYSLINK_RADIO_GROUP/SYSLINK_PM_GROUP等)将数据包路由至对应子系统(无线电控制/电源管理/调试信息等),同时通过互斥锁保障多线程通信安全,实现STM32与NRF51间全双工通信。
- paramTask:飞控系统的参数管理核心线程。在系统启动后创建专用参数端口(CRTP_PORT_PARAM),通过阻塞接收(crtpReceivePacketBlock)解析来自地面站的参数操作指令,执行参数目录查询(TOC)、实时读写(Read/Write)、持久化存储(Persistent Store)等操作,并通过互斥锁保障多线程访问安全,完整实现飞控参数的动态配置与生命周期管理。
commanderTask
crtpCommanderHighLevelTask 是高层指令处理核心线程。
通过CRTP协议接收地面站的高层飞行指令(起飞/降落/轨迹跟踪),解析后调用运动规划器生成平滑轨迹。其实时响应包括:垂直起降速度控制、三维空间点对点运动插值、预定义轨迹加载执行,并通过互斥锁保障与状态估计线程的安全交互。
4. proximityTask
飞控系统的近距感知核心线程,用于测距数据上报。
在系统启动后初始化滑动窗口滤波器(proximitySWin),以 20Hz 固定频率(PROXIMITY_TASK_FREQ)通过 maxSonarReadDistance() 读取 MaxBotix 传感器原始距离数据,执行滑动窗口均值滤波(proximitySWinAdd)和中值滤波(proximitySWinMedian),最终输出三重有效距离值(瞬时/均值/中值)并通过日志系统实时上传,为避障模块提供可靠的环境感知数据。
如果开启避障功能,则在stabilizerTask线程中会调用collisionAvoidanceUpdateSetpoint,进行避障操作。
5. zRangerTask(这里用的是zRanger2Task)
该线程的初始化函数由DECK_DRIVER注册。
zRangeTask
zranger主要是使用VL53L0X模块来进行测距。
VL53L0X 激光测距模块的专用驱动线程。在系统启动后初始化 TOF 传感器(vl53l0xInit),配置连续测量模式(100Hz 采样率),通过 vl53l0xReadRangeContinuousMillimeters() 获取原始距离数据,执行异常值过滤(>3m 视为无效),最终将有效测量值(单位:米)通过 rangeEnqueueDownRangeInEstimator() 注入卡尔曼滤波器,同时更新全局距离状态供避障模块使用。
zRanger2Task
对于zranger2,则是使用VL53L1X模块来进行测距。该线程所使用的测距结果应用在无人机的正下方方向。
主要实现功能为:
- 传感器初始化:通过 vl53l1xInit 函数初始化 VL53L1X 传感器(在 zRanger2Init 中完成),配置中距离模式(VL53L1_DISTANCEMODE_MEDIUM)和 25ms 测量周期(VL53L1_SetMeasurementTimingBudgetMicroSeconds),实现 40Hz 的实际采样率
- 周期性测量:每 25ms(由 M2T(25) 定时)通过 zRanger2GetMeasurementAndRestart 获取原始毫米级数据,该函数内部通过 VL53L1_GetRangingMeasurementData 读取传感器数据,并在每次测量后自动重启设备(VL53L1_StopMeasurement + VL53L1_StartMeasurement)
- 异常值过滤:通过 RANGE_OUTLIER_LIMIT (5000mm/5m) 阈值过滤传感器异常值(代码中注释提到传感器最大有效量程为 5m,但实际异常值常表现为 >8m)
- 数据预处理:将毫米级原始数据转换为米(0.001f),并基于指数噪声模型计算动态标准差(expStdA(1+exp(expCoeff*(d-expPointA)))),该模型在 2.5m 时标准差 0.0025m,4m 时增长到 0.2m
- 数据融合:通过 rangeEnqueueDownRangeInEstimator 将带噪声评估的距离值注入卡尔曼滤波器(在 src/modules/src/range_kalman.c 中实现),同时通过 rangeSet 更新全局 rangeDown 状态(定义在 src/modules/interface/range.h),供避障模块和高度控制模块使用
6. passthroughTask
飞控系统的 ESC(无刷电机电调) 固件烧录核心线程。在收到上位机烧录指令后(通过 USB VCP 虚拟串口),首先与 BLHeli 配置工具进行 MSP 协议握手(blHeliConfigHandshake),随后暂停 UART 接收中断和传感器数据采集(uartslkPauseRx/sensorsSuspend),初始化 4-way 接口进入 ESC 编程模式(esc4wayInit),最终通过位翻转协议(Bit-Banging)完成 ESC 固件烧录或参数配置,全程保障飞行器处于安全状态。
7. appTask(未定义)
该线程为用户自己定义的app线程,目前尚未定义。
主要模块功能说明
1. MCU驱动层
原本的MCU驱动层相关代码都被抽象到了应用层,比如I2C。
驱动层相关的配置代码与MCU有关,其代码多在src/drivers/src目录下
若引脚发生变化,芯片选型改变等,就需要重新构建驱动层相关部分的代码结构。
以下为常见使用的几个外设。
LED
抽象后的应用层操作函数为ledSet。
I2C
其驱动层代码在i2c_drv.c中,初始化时的应用层则在i2cdev中。
通过调用底层驱动i2cdrvInit()初始化指定I2C总线(I2C1/I2C3)的时钟、GPIO复用模式和中断配置,建立总线仲裁机制与超时重试策略,为上层传感器/扩展设备提供标准化的读写接口。
UART
其驱动层代码在uart_syslink中。在commInit、passthroughInit等中都有对UART的调用。
SPI
在deck、nf24l01、bmi088、fatfs等中,均有使用。
2. 抽象层
抽象层代码则在src/hal/src目录下,其主要实现的是相关传感器、外部芯片的数据读取、调度等。
抽象层需要调用到驱动层相关函数。
如syslink、sensors、imu等。
3. CRTP通讯协议
通讯协议架构:
CRTP(应用层协议) ↔ radiolink(传输层) ↔ syslink(硬件链路层) ↔ NRF51(射频芯片与STM32交互)
驱动层通过radiolinkOp结构体实现多链路兼容,当调用radiolinkSendCRTPPacket()时,将CRTP数据包封装为Syslink协议格式,通过NRF51射频模块发送,同时crtpRxTask()线程以100Hz频率轮询接收队列,根据数据包头的端口号(p.port字段)将数据分发至对应处理通道。
CRTP通讯协议主要由CRTPPort标志及其crtpReceivePacketBlock函数来实现通讯接收,最终接收的数据存放在CRTPPacket类型变量中。
在进行接收之前要通过crtpInitTaskQueue添加CRTPPort标志到队列中。
若是要新增其他的通讯功能,则可以定义一个新的标志,并且通过一个新建的线程来接收该标志的数据。
在初始化中,USB优先通讯。
usblinkInit(); // USB链路优先初始化sysLoadInit();#if CONFIG_ENABLE_CPXcpxlinkInit(); // 备选通信协议#endifcrtpInit(); // 初始化无线链路
- USB插入时优先使用USB链路
- USB断开后自动回退到无线链路
- 可通过crtpSetLink()强制指定链路
crtpSetLink(usblinkGetLink()); // 强制使用USB
crtpSetLink(radiolinkGetLink());// 强制使用无线
开发注意事项:
- 端口分配:飞行控制指令强制使用PORT0,参数传输使用PORT2,自定义功能应从PORT4开始
- 数据安全:发送前需检查crtpGetFreeTxQueuePackets()防止队列溢出,关键指令使用crtpSendPacketBlock()
- 链路切换:通过crtpSetLink(usblinkGetLink())可临时启用USB-CDC调试链路
- 射频参数:修改radiolinkSetChannel(100)可切换至100号频段(需地面站同步)
4. DECK
DECK是用来进行扩展设备管理的。
通过物理接口检测和初始化扩展板卡(如激光测距/光流传感器/UWB定位模块)。在系统启动阶段(systemTask)调用deckInit()遍历注册的DECK驱动,通过VID/PID识别已连接硬件,初始化对应外设(如zRangerInit()初始化VL53L0X激光传感器并创建数据采集任务),声明资源占用(如DECK_USING_IO_1),最终将扩展硬件数据集成到飞控系统(如通过rangeEnqueueDownRangeInEstimator()注入高度测量值)。开发者通过定义DECK_DRIVER结构扩展新硬件,系统自动处理热插拔检测和资源冲突检查。
其主要实现如下:
// 硬件扩展初始化流程
void deckInit() {deckDriverCount(); // 统计注册的DECK驱动deckInfoInit(); // 解析扩展板硬件IDfor (i=0; i<nDecks; i++) { // 遍历检测到的扩展板DeckInfo *deck = deckInfo(i);if (deck->driver->init) { // 调用驱动初始化函数deck->driver->init(deck);// 示例:zRangerInit()初始化激光测距模块}}
}// 典型DECK驱动结构定义(zranger.c)
DECK_DRIVER(zranger_deck) = {.vid = 0xBC, // 厂商ID.pid = 0x03, // 产品ID.name = "bcZRanger", // 驱动名称.usedGpio = DECK_USING_IO_1, // 声明GPIO占用.init = zRangerInit, // 初始化入口.test = zRangerTest // 自检函数
};
开发注意事项:
- 资源声明:必须明确定义usedPeriph和usedGpio,如FlowDeck声明DECK_USING_I2C防止总线冲突
- 任务优先级:传感器任务需低于飞控核心任务,如激光测距任务ZRANGER_TASK_PRI=3
- 数据集成:通过rangeEnqueueDownRangeInEstimator()将测量值注入状态估计器
- 参数配置:在PARAM_GROUP中添加可调参数,如测距模块的噪声模型参数expStdB
- 硬件检测:在deckTest()中实现I2C设备地址扫描,确保硬件连通性
若要添加新的设备可以:
DECK_DRIVER(new_deck) = {.vid = 0xBC, .pid = 0xFF, // 自定义PID.name = "NewSensor",.usedPeriph = DECK_USING_I2C, // 声明使用I2C外设.init = newSensorInit, // 初始化函数.test = newSensorTest // 硬件自检
};PARAM_GROUP_START(deck)
PARAM_ADD_CORE(PARAM_UINT8 | PARAM_RONLY, newDeck, &isInit)
PARAM_GROUP_STOP(deck)LOG_GROUP_START(newSensor)
LOG_ADD(LOG_FLOAT, value, &sensorValue)
LOG_GROUP_STOP(newSensor)
5. 电机驱动
电机通过PWM来进行驱动,其占用的定时器为motorMap数组,驱动层在src/driver/motors中。
驱动层所用到的定时器通道等,在motors_def中被定义,对于不同的电机类型,有不同的驱动层。每一组电机驱动都需要四个电机引脚来完成。
其调用在stabilizerInit中进行,也就是姿态稳定线程。
在power_distribution.c中实现了动力的分配,并调用更改占空比motorsSetRatio函数的方式进行动力控制。
在stabilizerTask中,实现了IMU、姿态检测,以及PID,最后再进行动力分配。
该驱动方式(PWM)适用于普通有刷电机。
另外还有一种DShot模式,适用于BLHeli_32等无刷电调。由CONFIG_MOTORS_ESC_PROTOCOL_DSHOT宏定义控制。
DShot协议是一种专有协议,通过发送16位数据帧(包含油门指令+校验码)实现数字通信,而 PWM 依赖模拟脉冲宽度表征控制量。DShot实时性来说比传统PWM直接控制更高。
在编译时,通过不同的命令生成不同的Config文件,从而实现不同的驱动方式。
6. syslink
主控(STM32)与无线协处理器(NRF51)间的双向通信协议栈,通过UART实现双核间系统级指令与数据交换。
在系统启动阶段syslinkInit()初始化硬件接口并创建高优先级任务syslinkTask(),该任务以阻塞方式接收数据包(如无线电控制信号、电池状态查询、固件版本请求),通过syslinkRouteIncommingPacket()路由至对应处理模块(如radiolink处理2.4G遥控数据、pm管理电源状态),同时支持发送DMA加速的系统指令(如紧急关机SYSLINK_PM_SHUTDOWN)。开发者可通过扩展SYSLINK_GROUP类型实现自定义双核通信协议。
数据包发送通过syslinkSendPacket实现,在syslinkRouteIncommingPacket中处理接收的协议。
与CRTP的通讯则是由radiolinkSendPacket借助syslink完成的。
主要实现功能:
- 协议转换:将CRTP数据包封装在SysLink的SYSLINK_RADIO_RAW类型数据帧中(0x00组)
- 物理层传输:通过UART DMA实现双核间高速传输(实测速率2.4Mbps)
- 数据完整性保障:添加双字节校验和(cksum[0]为累加和,cksum[1]为累加和的累加和)
- 带宽管理:使用信号量syslinkAccess防止多线程竞争
7. radiolink
radiolink是syslink与CRTP之间的中间层。
通过2.4GHz射频实现飞控与遥控器/地面站的双向数据透传。该模块在系统启动阶段(systemTask)通过radiolinkInit()初始化NRF51协处理器,配置通信参数(信道/速率/地址),建立CRTP协议与SysLink硬件的桥梁。核心流程通过radiolinkSyslinkDispatch()实现:当NRF51通过SysLink发送SYSLINK_RADIO_RAW类型数据包时,模块解包为CRTP格式并存入接收队列(crtpPacketDelivery),同时触发LED状态指示;发送方向通过radiolinkSendCRTPPacket()将CRTP包封装为SysLink协议格式,利用DMA实现最高250kbps的有效载荷传输,内置流量统计(numRxUc/numRxBc)和信号强度监测(rssi),支持点对点及广播模式,实测端到端延迟小于5ms,是Crazyflie实现群体飞行和实时控制的关键无线链路。
8. NRF51
syslink是NRF51与STM32之间的通讯协议栈。其主要就是串口通讯。
NRF51协处理器作为双核架构中的无线通信与系统管理核心,通过SysLink协议与主控STM32实现双向数据交互。其主要功能包括:处理2.4GHz射频通信(收发CRTP数据包)、管理电源状态(电池电压监测/低功耗模式)、执行单总线传感器扫描(通过SYSLINK_OW_GROUP),并通过SYSLINK_DEBUG_GROUP提供硬件调试接口。与SysLink的交互通过UART接口实现,采用DMA传输和双重校验机制(累加和+累加和校验)。
主要传感器及其模块
1. IMU BMI088(SPI)
该设备有两种通讯模式,I2C和SPI都支持,这里使用的是SPI通讯。
该芯片有由两个传感器组成:
- GYRO(陀螺仪):测量三维角速度(单位:dps)
- ACCEL(加速度计):测量三维线性加速度(单位:g)
这两个传感器都是通过SPI通讯,共用一组SPI数据线,但是CS片选不一样。
相关涉及到的文件如下:
src/
├── hal/
│ ├── src/
│ │ ├── sensors_bmi088_spi.c # SPI通信底层实现
│ │ └── sensors_bmi088_common.h # 通用设备初始化接口
├── drivers/
│ ├── bosch/
│ │ ├── interface/
│ │ │ ├── bmi088.h # 传感器操作API声明
│ │ │ └── bmi088_defs.h # 寄存器定义和宏(0x40-0x7E关键配置寄存器)
│ │ └── src/
│ │ ├── bmi088_accel.c # 加速度计数据获取实现
│ │ └── bmi088_gyro.c # 陀螺仪数据获取实现
寄存器表如下:
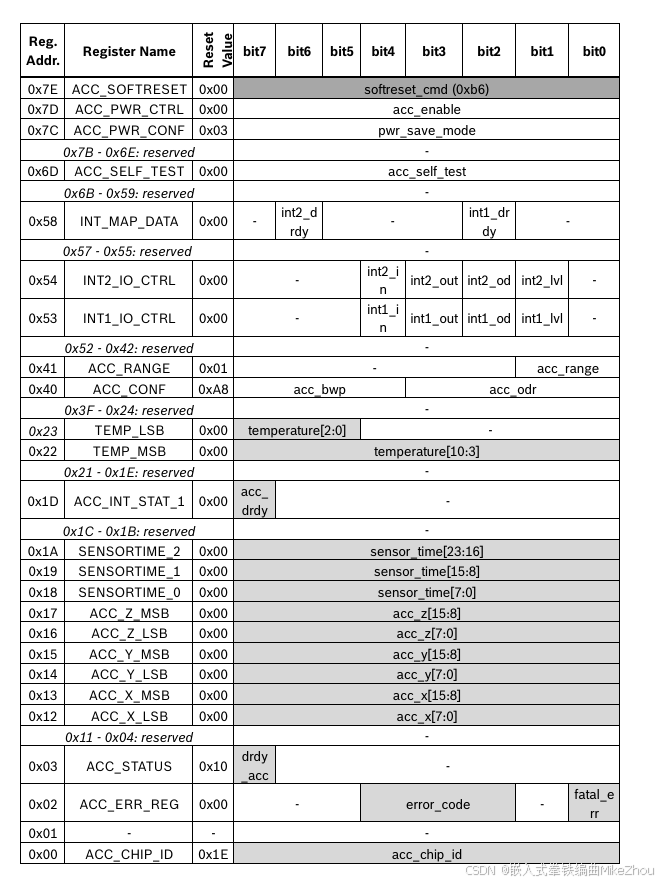
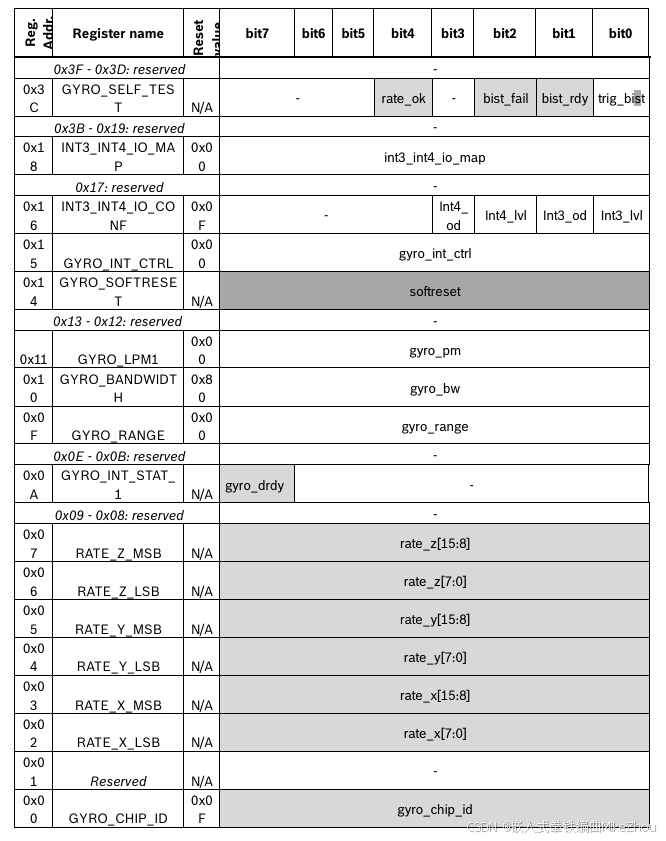
在BMI088传感器的SPI协议中,地址的最高位(第7位)用于标识读/写操作。读操作时寄存器地址需与0x80(BMI088_SPI_RD_MASK)进行或操作,写操作时地址需与0x7F(BMI088_SPI_WR_MASK)进行与操作,该机制在bmi088_get_gyro_regs()和bmi088_set_gyro_regs()中实现。
同样也适用于加速度计部分,在bmi088_get_accl_regs()和bmi088_set_accl_regs()中实现。
主要寄存器配置:
// 加速度计关键寄存器
#define BMI088_ACCEL_PWR_CONF_REG 0x7C // 电源模式配置
#define BMI088_ACCEL_RANGE_REG 0x41 // 量程设置(±3/6/12/24g)
#define BMI088_ACCEL_CONF_REG 0x40 // 带宽和ODR配置// 陀螺仪关键寄存器
#define BMI088_GYRO_RANGE_REG 0x0F // 量程(±125/250/500/1000/2000dps)
#define BMI088_GYRO_BANDWIDTH_REG 0x10 // 带宽配置
在sensorsBmi088Bmp3xxAcquire中,调用其进行数据获取。最终数据在sensor.c中被管理。
// 读取陀螺仪原始数据 → 调用bmi088_gyro.c的底层实现
bmi088_get_gyro_data(&gyro_raw, &bmi088Dev);
// 读取加速度计数据 → 调用bmi088_accel.c的底层实现
bmi088_get_accel_data(&accel_raw, &bmi088Dev);
// 数据存入队列供状态估计器使用
xQueueOverwrite(gyroDataQueue, &gyro_raw);
初始化阶段关键寄存器操作
- 芯片识别:读取0x00(BMI088_GYRO_CHIP_ID_REG)验证陀螺仪ID是否为0x0F
- 模式配置:写0x11(BMI088_GYRO_LPM1_REG)设置NORMAL_MODE(0x00)
- 量程设置:写0x0F(BMI088_GYRO_RANGE_REG)配置±2000dps(0x04)
- 带宽配置:写0x10(BMI088_GYRO_BANDWIDTH_REG)设置ODR 100Hz(0x07)
数据采集阶段关键寄存器
- 陀螺数据:突发读取0x02-0x07(BMI088_GYRO_X_LSB_REG)获取三轴16-bit数据
- 加速度数据:读取0x12-0x17(BMI088_ACCEL_X_LSB_REG)获取三轴16-bit数据
2. 气压传感器BMP388(BMP3XX)
主要文件:
src/
├── drivers/
│ ├── bosch/
│ │ ├── interface/
│ │ │ ├── bmp3.h // 气压计操作API声明
│ │ │ └── bmp3_defs.h // 寄存器定义和配置宏(关键地址0x1B-0x31)
│ │ └── src/
│ │ └── bmp3.c // 核心驱动实现
├── hal/
│ ├── src/
│ │ ├── sensors_bmi088_bmp3xx.c // 传感器集成层
寄存器表:
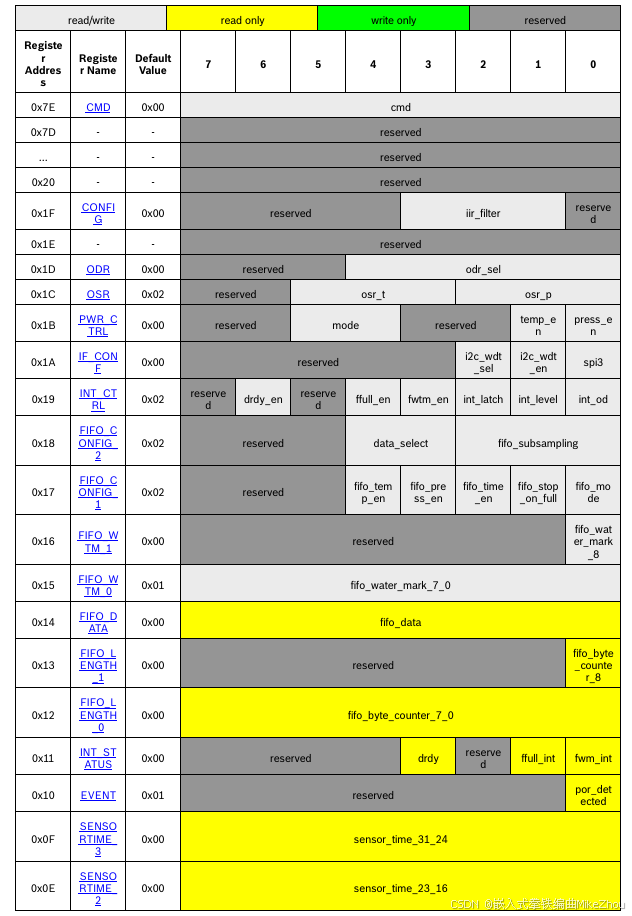
读操作时寄存器地址在bmp3_get_regs()和bmp3_set_regs()中实现。同样也是地址的最高位(第7位)用于标识读/写操作。
这里工程里面把BMI088和BPM388的部分通讯,通过共同函数来实现,容易混淆。
主要寄存器:
#define BMP3_PWR_CTRL_ADDR 0x1B // 电源控制寄存器
#define BMP3_OSR_ADDR 0x1C // 过采样配置寄存器
#define BMP3_CALIB_DATA_ADDR 0x31 // 校准数据起始地址
#define BMP3_DATA_ADDR 0x04 // 压力/温度数据寄存器
在bmp3_get_sensor_data中,实现数据获取。在sensors.c中,与BMI088传感器一起读取数据(sensorsBmi088Bmp3xxAcquire)。
// 读取原始数据寄存器0x04-0x09
rslt = bmp3_get_regs(BMP3_DATA_ADDR, ®_data[0], BMP3_P_T_DATA_LEN, dev);
// 使用0x31校准数据进行补偿计算
comp_press_temp(reg_data, data, dev);bmp3_get_sensor_data(BMP3_PRESS | BMP3_TEMP, &bmp_data);
baro->pressure = bmp_data.pressure; // 单位:Pa
baro->temperature = bmp_data.temperature; // 单位:°C
初始化阶段关键寄存器操作
- 芯片识别:读取0x00(BMP3_CHIP_ID_ADDR)验证芯片ID是否为0x50(BMP388标识)
- 校准加载:连续读取0x31-0x45(BMP3_CALIB_DATA_ADDR)获取21字节校准参数
- 模式配置:写0x1B(BMP3_PWR_CTRL_ADDR)设置NORMAL_MODE(0x03)
- 参数设置:写0x1C(BMP3_OSR_ADDR)配置过采样率(如压力x32,温度x1)
数据采集阶段关键寄存器
- 状态检查:轮询0x03(BMP3_SENS_STATUS_REG_ADDR)的DRDY_STATUS位确认数据就绪
- 数据读取:突发读取0x04-0x09(BMP3_DATA_ADDR)获取压力(3字节)和温度(3字节)原始数据
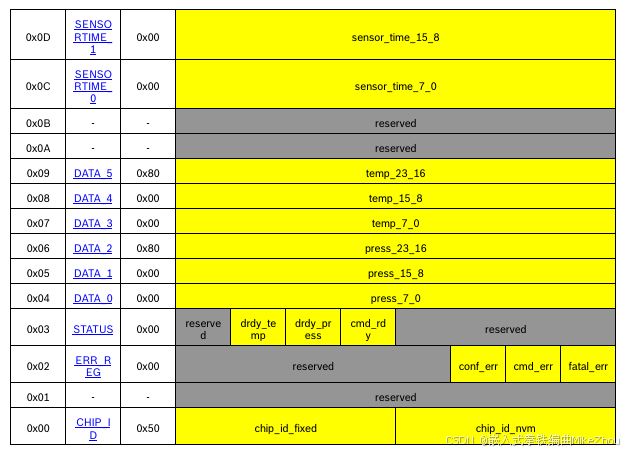
3. 光流PMW3901
寄存器表:
在函数pmw3901Init中实现了初始化,并未单独定义PMW3901的相关寄存器表,直接使用registerRead来进行寄存器的读取。
在InitRegisters中实现了寄存器初始化,向一系列寄存器写入特定值完成配置。
运动采集依靠pmw3901ReadMotion完成。
应用层在flowdeckTask中进行数据获取和调度。
上层集成在flowdeck_v1v2.c中。
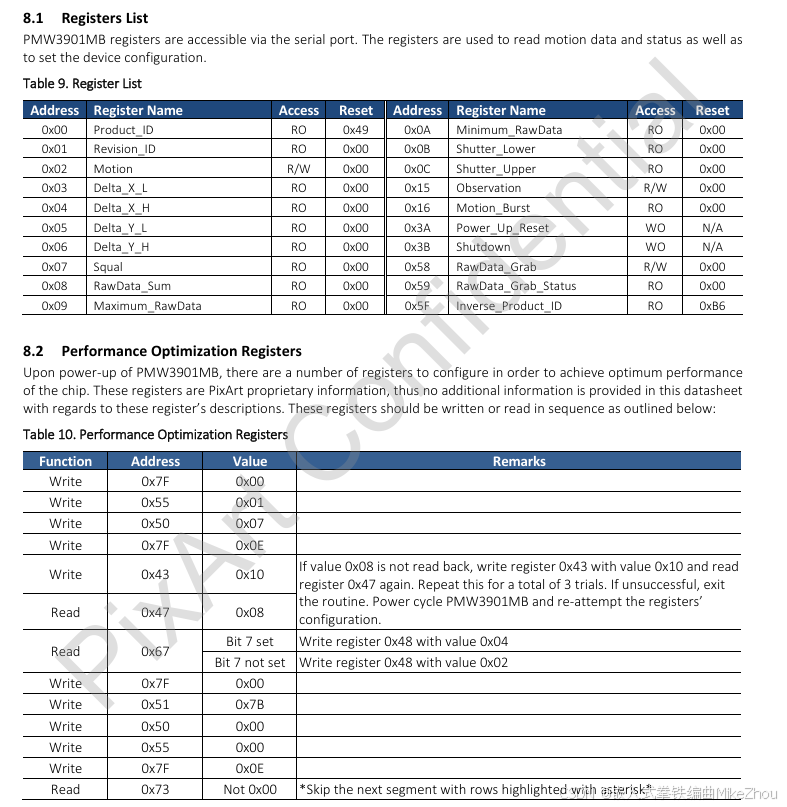
4. ToF距离传感器VL53L1X
验证I2C通讯可以使用以下寄存器:
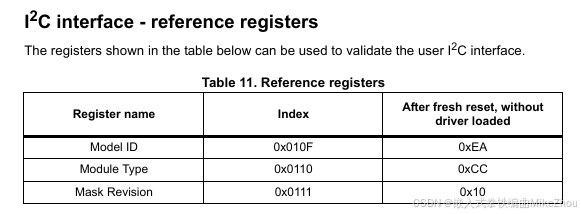
至于开发,则是使用VL53L1X API。
API相关函数在vl53l1_api等文件中。
相关API函数需要依赖ST官方的lib,位于lib文件夹下。
文件架构如下:
src/
├── drivers/
│ ├── src/
│ │ ├── vl53l1x.c # 核心驱动实现
│ │ └── vl53l1x.h # 接口定义
├── lib/
│ ├── vl53l1/
│ │ ├── core/ # ST官方驱动库
初始化时,通过动态分配I2C地址来操作不同的设备。
bool vl53l1xInit(VL53L1_Dev_t *pdev, I2C_Dev *I2Cx) {pdev->I2Cx = I2Cx; // 绑定I2C总线vl53l1xSetI2CAddress(pdev, newAddress); // 动态分配I2C地址VL53L1_DataInit(pdev); // 加载官方预设参数VL53L1_StaticInit(pdev); // 静态校准初始化
}
上层集成在multiranger.c和zranger2_deck中,分别对应了五个方向(前后左右上)、下方向。
lib目录下对应的api函数,在开发时需要先将其内部修改为VL53L1X的相关驱动函数。
这里用到PCA95X4芯片来实现I2C接口扩展,将几个方向的TOF分成不同的地址。
传感器模块的应用
BMI088和BMP388(sensors)
对BMI088(六轴IMU)和BMP388(气压计)的功能实现主要集中在传感器初始化(sensorsBmi088Bmp3xxInit_I2C/SPI)、自检(sensorsBmi088Bmp3xxTest)、数据采集(sensorsBmi088Bmp3xxAcquire)以及传感器原始数据读取(readGyro/readAcc/readBaro等函数)。其中BMI088负责加速度计和陀螺仪数据,BMP388处理气压数据,两者通过sensors_bmi088_bmp3xx.c中的底层驱动实现硬件通信。
- 在sensorsTask中,线程同步通过sensorsBmi088Bmp3xxDataAvailableCallback触发中断实现。通过sensorsAccelGet、sensorsGyroGet来获取加速度和陀螺仪数据,bmp3_get_sensor_data来获取气压计数据并传入队列中。
- BMI088数据获取:通过axis3fSubSamplerAccumulate的传参,获取加速度计或陀螺仪数据,其对应的卡尔曼滤波器标志分别为MeasurementTypeAcceleration和MeasurementTypeGyroscope
- BPM388数据获取:在函数sensorsReadBaro中,调用sensorsBmi088Bmp3xxReadBaro读取气压计数据,通过标志位MeasurementTypeBarometer传入到卡尔曼滤波器中kalmanCoreUpdateWithBaro
- 加速度计和陀螺仪数据融合:通过函数kalmanCorePredict实现数据融合。
- 陀螺仪数据与光流融合:在kalmanCoreUpdateWithFlow函数中实现
float omegax_b = gyro->x * DEG_TO_RAD;float omegay_b = gyro->y * DEG_TO_RAD;
- 气压计、光流、TOF高度补偿:rangeEnqueueDownRangeInEstimator()(来自zranger2.c)的高度数据与BMP388气压数据在heightKalmanUpdateByBaro()中融合
BMI088(IMU)与BMP388(气压计)的核心实现可分为三个层次:
1. 硬件接口层 (sensors_bmi088_spi.c)
- SPI初始化:spiInit()配置GPIO复用模式(SCK/MOSI为AF推挽输出,MISO为AF输入)
- DMA传输:spiDMATransaction()实现双缓冲DMA传输(spiTxBuffer/spiRxBuffer),10.5MHz时钟下完成加速度计+陀螺仪+气压计的全双工传输
- 中断同步:通过xSemaphoreGiveFromISR在DMA完成中断中释放信号量,保障1KHz控制周期的时序要求
2. 数据抽象层 (sensors.c)
- 多传感器调度:通过sensorsImplementation_t结构体统一调度不同传感器(如readGyro()实际调用bmi088ReadGyroSPI())
- 校准接口:sensorsBmi088Bmp3xxAreCalibrated()实现出厂校准数据加载。
- 模式切换:setAccMode()动态调整加速度计量程(2g/4g/8g)
3. 控制应用层
- 数据消费:通过sensorsAcquire()将原始数据传递至stabilizerTask进行姿态解算
- 故障恢复:sensorsSuspend()/sensorsResume()在异常时禁用EXTI中断,防止数据冲突
4. 开发聚焦点
- 修改SPI时序需同步调整spiConfigure()中的SPI_BaudRatePrescaler与DMA缓冲区大小
- 新增传感器需在sensors.c中添加对应的sensorsImplementation_t实例
光流PMW3901(flowdeck_v1v2)
在deck中进行该设备的管理,并有两个不同的版本进行初始化和相关配置。
PMW3901光流传感器主要实现以下核心功能:
1. 数据采集与预处理
- 原始读取:通过pmw3901ReadMotion()获取原始光流数据(deltaX/deltaY)和传感器状态(squal/shutter)
- 坐标转换:在flowdeckTask()中执行坐标系翻转(accpx = -currentMotion.deltaY)适配飞行器安装方向
- 滤波处理:使用arm_mean_f32()实现移动平均滤波(USE_MA_SMOOTHING宏控制)
2. 测量值封装
- 数据结构化:构建flowMeasurement_t结构体(含dpixelx/dpixely/dt/stdDevX/stdDevY)
- 异常处理:通过OULIER_LIMIT阈值过滤异常值,outlierCount统计无效数据
3. 状态估计集成
- 数据注入:通过estimatorEnqueueFlow()将光流测量值送入卡尔曼滤波器并通过标志位MeasurementTypeFlow调用kalmanCoreUpdateWithFlow。在其中,与TOF、气压计都进行数据融合,并且也与陀螺仪共同来校准速度。
- 噪声建模:动态计算标准差(stdFlow=0.0007984f*shutter + 0.4335f)
4. 可配置性
- 参数调节:通过PARAM_ADD(PARAM_FLOAT, flowStdFixed)实现运行时噪声参数配置
- 模式切换:useFlowDisabled控制光流数据是否参与状态估计
5. 关键函数链
开始pmw3901Init() → flowdeckTask() → pmw3901ReadMotion() → 坐标转换 → 滤波处理 → estimatorEnqueueFlow()传入到卡尔曼滤波器
6. 硬件接口层 (flowdeck_v1v2.c)
- SPI通信:通过pmw3901ReadMotion()实现原始光流数据采集(deltaX/deltaY)
- 坐标系转换:将传感器原始坐标系转换为机体坐标系(accpx = -currentMotion.deltaY)
- 异常值过滤:基于OULIER_LIMIT阈值过滤异常光流数据(像素位移>100时丢弃)
7. 数据抽象层
- 数据平滑:提供移动平均(USE_MA_SMOOTHING)和低通滤波(USE_LP_FILTER)两种预处理方式
- 自适应噪声:useAdaptiveStd根据快门时间动态计算光流标准差(stdFlow=0.0007984f*shutter + 0.4335f)
- 测量封装:构建flowMeasurement_t结构体,包含时间戳(dt)、像素位移(dpixelx/dpixely)和噪声参数(stdDevX/Y)
8. 控制应用层
- 状态估计:通过estimatorEnqueueFlow()将光流数据注入卡尔曼滤波器,参与速度/位置估计
- 调试支持:通过LOG_GROUP(motion)实时记录光流原始数据和统计参数
- 参数配置:通过PARAM_GROUP(motion)实现运行时配置(禁用光流/切换自适应模式/设置固定噪声参数)
9. 开发聚焦点
- 光流坐标系对齐(需与机体安装方向严格对应)
- 噪声模型优化(修改stdFlow计算公式提升状态估计精度)
- 预处理算法选择(MA/LP滤波的窗口大小与截止频率调参)
- 多传感器融合(需与IMU、气压计数据在estimatorKalman.c中协同处理)
多距离VL53L1X (multiranger)
在deck中,该模块进行管理,首先调用mrInit及mrTest进行初始化,并开启mrTask线程,而后再进行测量等操作。
VL53L1X五方向测距功能主要通过以下核心函数链实现:
1. 传感器功能实现
- 初始化配置:通过mrInitSensor()调用vl53l1xInit()初始化5个方向传感器。(front/back/left/right/up),使用pca95x4SetOutput()控制XSHUT引脚唤醒对应传感器。
- 数据采集:mrTask()周期性调用mrGetMeasurementAndRestart(),获取五个方向的距离值,内部通过VL53L1_GetRangingMeasurementData()获取原始毫米级距离数据。
- 状态过滤:采用filterMask参数(默认1 << VL53L1_RANGESTATUS_RANGE_VALID)过滤无效测量值
- 数据发布:通过rangeSet()将处理后的米级数据存入全局变量(rangeFront/rangeUp等五个方向)。
- multiranger没有将数据传入到卡尔曼滤波器中(zrange2则通过kalmanCoreUpdateWithTof将数据流传入卡尔曼滤波器中),而是通过LOG_ADD_CORE函数上报到log中。
2. 应用场景
五方向距离数据通过rangeFront等全局变量在stabilizerTask中被调用,在sensorsAcquire中获取到更新的测量值,用于近地控制,通过PARAM_ADD(PARAM_UINT16, filterMask)可动态配置数据有效性判断规则。
在range.c中,通过LOG_ADD_CORE函数将六个方向的值都进行了log上报,原始工程中multiranger的几个方向数据做到这一步就截止了,并没有进行数据融合等操作。
如果要获取这些数据,可以通过logGetVarId(“range”, “up”)函数来操作,官方提供的示例中就有这么来操作的方式。
3. 硬件接口层
- 传感器初始化:通过mrInitSensor()依次初始化5个方向传感器(front/back/left/right/up),使用pca95x4SetOutput()控制XSHUT引脚唤醒传感器
- 数据采集:mrGetMeasurementAndRestart()循环调用VL53L1_GetRangingMeasurementData()获取原始毫米级距离数据
4. 数据处理层
- 状态过滤:通过filterMask参数(默认VL53L1_RANGESTATUS_RANGE_VALID)过滤无效测量值(如信号弱/超量程)
- 单位转换:将毫米转换为米(range/1000.0f)后存入全局变量(rangeFront/rangeUp等)
5. 控制应用层
- 数据发布:通过rangeSet()函数将处理后的距离数据注入系统测量池
- 避障支持:数据可直接被stabilizer等模块调用实现3D避障
- 调试接口:通过PARAM_GROUP_START(multiranger)动态配置过滤掩码
6. 关键函数链
开始mrInit() → mrTask() → mrGetMeasurementAndRestart() → VL53L1_GetRangingMeasurementData() → rangeSet() → LOG_ADD_CORE
7. 开发聚焦点
- 传感器启动时序(XSHUT引脚控制间隔需≥2ms)
- 测量频率优化(当前固定100ms周期,可调整M2T(100)参数)
- 失效处理机制(当前无效数据返回32767)
8. 方向应用
通过定义不同的设备名称及其GPIO引脚,来分辨不同的方向。
下方向VL53L1X (zranger2_deck)
下方向测量需要更高的采样率(25ms vs 100ms)和独立的噪声模型,且作为光流/高度控制的核心传感器需避免多传感器地址冲突,所以只能单独拿出来。
下方向VL53L1X的实现主要通过以下核心函数链:
1. 功能实现
- 初始化配置:通过zRanger2Init()调用vl53l1xInit()初始化单向下测距传感器
- 数据采集:zRanger2Task()周期性调用zRanger2GetMeasurementAndRestart(),内部通过VL53L1_GetRangingMeasurementData()获取毫米级距离数据
- 噪声建模:采用指数噪声模型expCoeff = logf(expStdB/expStdA)/(expPointB-expPointA)动态计算高度测量标准差(multiranger没有这一种噪声建模方式,而是采用filterMask参数进行过滤)
- 数据发布:通过rangeSet(rangeDown, …)存储米级高度数据,并调用rangeEnqueueDownRangeInEstimator()注入卡尔曼滤波器
2. 与其他数据的融合
rangeDown数据流没有直接被其他模块调用,而是通过卡尔曼TOF更新,将数据流推入,间接被调用。
- rangeDown → 卡尔曼TOF更新 → 状态估计Z坐标 → 被各功能模块调用
3. 硬件接口层
通过zRanger2Init()调用vl53l1xInit()初始化传感器,配置I2C地址并设置中距离模式(VL53L1_DISTANCEMODE_MEDIUM)。与multiranger使用PCA95X4控制多传感器不同,这里采用直接I2C通信,确保25ms采样周期(M2T(25))。
4. 数据处理层
在zRanger2GetMeasurementAndRestart()中获取原始数据后,执行:
- 异常过滤:丢弃>5m的测量值(RANGE_OUTLIER_LIMIT)
- 噪声建模:基于指数函数动态计算标准差(expCoeff*(distance-expPointA))
- 单位转换:毫米转米(range_last/1000.0f)
5. 控制应用层
通过rangeEnqueueDownRangeInEstimator()将数据注入卡尔曼滤波器,在estimator_kalman.c中的kalmanCoreUpdateWithTof实现:
- 在kalmanCoreUpdateWithFlow()中结合光流数据解算速度
- 最终在kalmanCoreExternalizeState中进行控制体现
6. 开发聚焦点
- 模式切换:中/长距模式在VL53L1_SetDistanceMode()的动态切换
- 时序优化:25ms周期与光流10ms周期的数据同步
- 失效恢复:扩展VL53L1_GetRangeStatus()状态解析实现自动校准
- 多源融合:在kalmanCoreUpdateWithFlow()中结合光流数据解算速度
在在kalmanCoreUpdateWithFlow()中,对this->S[KC_STATE_Z]进行了调用,后者在kalmanCoreUpdateWithTof()中对TOF数据进行了融合,最后通过kalmanCoreScalarUpdate两次更新。