欣佰特科技亮相2025张江具身智能开发者大会:呈现人形机器人全链条解决方案
5月29日 ,2025年张江具身智能开发者大会在上海落下帷幕。欣佰特科技作为专注人形机器人与具身智能领域的创新企业,携一系列前沿产品与解决方案参展,与全球行业专家、企业共同探讨技术落地路径,展现其在具身智能领域的技术积累与场景化应用。
全链条人形机器人解决方案
欣佰特科技在展会现场呈现两大核心解决方案,聚焦技术实用性与行业适配性:具身智能通用系统解决方案借助Captiks动捕系统与 Haption、Haply 力反馈设备采集数据,运用人工智能模型分析优化具身智能算法,再通过 UR、KINOVA 机械臂及 Hello Robot、Mobile Aloha 等平台验证算法,覆盖数据采集、模型训练、算法验证全流程。
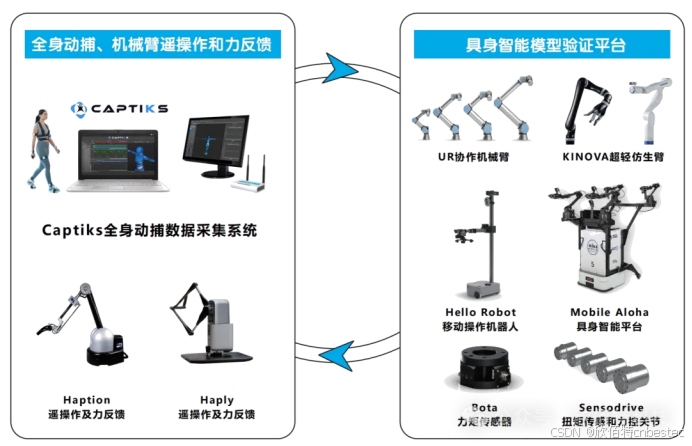
具身智能灵巧手系统解决方案采用Manus手部动捕手套、Senseglove力反馈手套和Weart触觉反馈手套,不仅能精准捕捉手部动作并将其映射到灵巧手上,还能采集详细的力触觉信息作为反馈。接下来,利用深度学习算法优化控制模型,并通过Sarcomere、Tesollo等多种构型的灵巧手结合实际场景来验证这些算法的有效性,最终实现更加精准的抓取操作。


此外,欣佰特科技特别邀请了XELA Robotics的软件工程师Keary Mobley,现场展示了XELA的矩阵式三轴触觉传感器。这款传感器具备高密度3轴力测量能力,能精准感知X、Y方向剪切力及Z轴法向力,支持曲面贴合与多形态物体抓取,展现了未来机器人操作的新可能。


XELA三轴力传感器阵列uSkin—帮助机械手实现力触觉
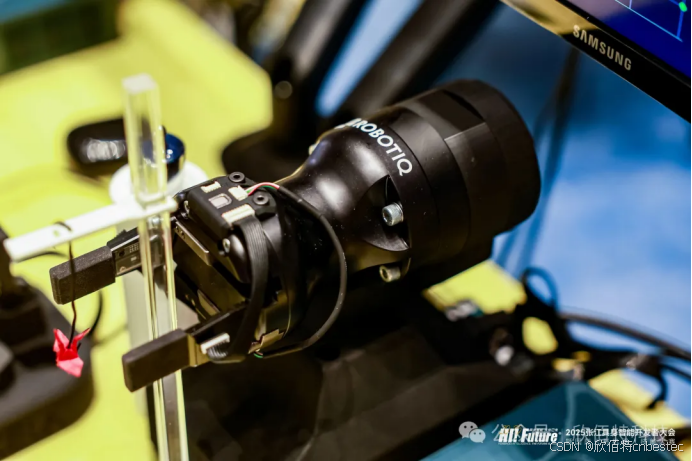
Keary Mobley 发表《为什么触觉感知对机器人的未来至关重要》主题演讲,指出当前机器人依赖视觉与 AI 定位但缺乏触觉反馈的技术瓶颈,强调触觉数据在抓握力度控制、物体属性识别及操作稳定性中的核心作用。他提到,XELA触觉传感器通过4线制轻量化设计与柔性材质,已实现与 Allegro Hand四指灵巧手、ROBOTIQ 夹爪等设备的集成,未来将通过自研Ai 软件实现滑动检测、抓握预测等功能,推动机器人从 "完成任务"向"精准交互"进化。


2025年张江具身智能开发者大会已落下帷幕,然而欣佰特科技在人形机器人与具身智能领域的探索仍在继续。未来,欣佰特科技会持续优化产品及解决方案,深化与行业伙伴的交流合作,推动前沿具身智能技术在各行业的应用。
