自驾总结_Prediction
综述:
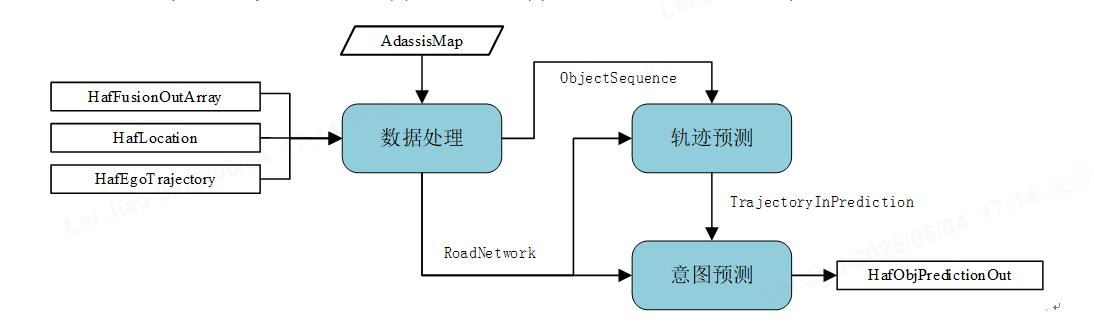
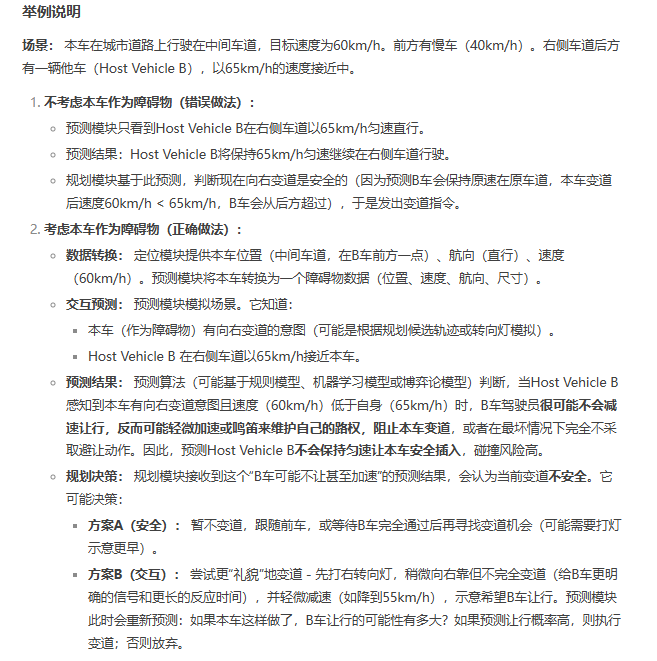
预测模块承接上游感知模块,结合高精地图和主车的定位信息,对周边障碍物的未来运动情况进行预测,最终输出各个在一段时间内的预测路径,提供给规划模块,帮助自车提前做出决策,从而降低交通事故的发生率。
总体结构和功能:
| 序号 | 功能模块 | 功能描述(用途) | 输入信号 | 输出信号 |
| 1 | 数据处理 | 处理外部输入信号,并根据每个障碍物的位置获取其附近的高精度地图,并转换成预测模型所需要的语义地图形式 | 高精度地图,定位信息,感知障碍物结果 | 障碍物序列及语义地图信息 |
| 2 | 轨迹预测 | 根据碍物特征,结合高精度地图信息,生成一条或多条短时间内的运动轨迹。 | 障碍物序列,高精度地图信息 | 障碍物及其预测轨迹 |
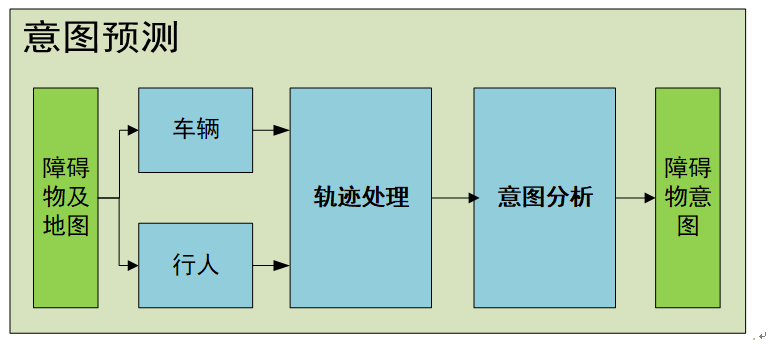
| 3 | 意图预测 | 根据目标类型及其运动轨迹,结合高精度地图信息,判断其未来的运动意图 | 障碍物及其预测轨迹,高精度地图信息 | 运动意图 |
| 一级模块 | 二级模块 | 三级模块 | 三级模块说明 |
| 数据处理 | 地图数据处理 | 数据接收 | 接收存储不同的地图元素信息(通过API或消息) |
| 路网构建 | 根据地图拓扑关系,将不同的地图元素构建成路网 | ||
| 感知结果处理 | 数据接收 | 接收障碍物信息(通过消息) | |
| LRU数据存储 | 根据障碍物的id,使用LRU数据结构来存储障碍物信息 | ||
| 定位结果处理 | 数据接收 | 接收定位信息(通过消息) | |
| 数据转换 | 转换成一个障碍物目标格式,保存到障碍物列表中 | ||
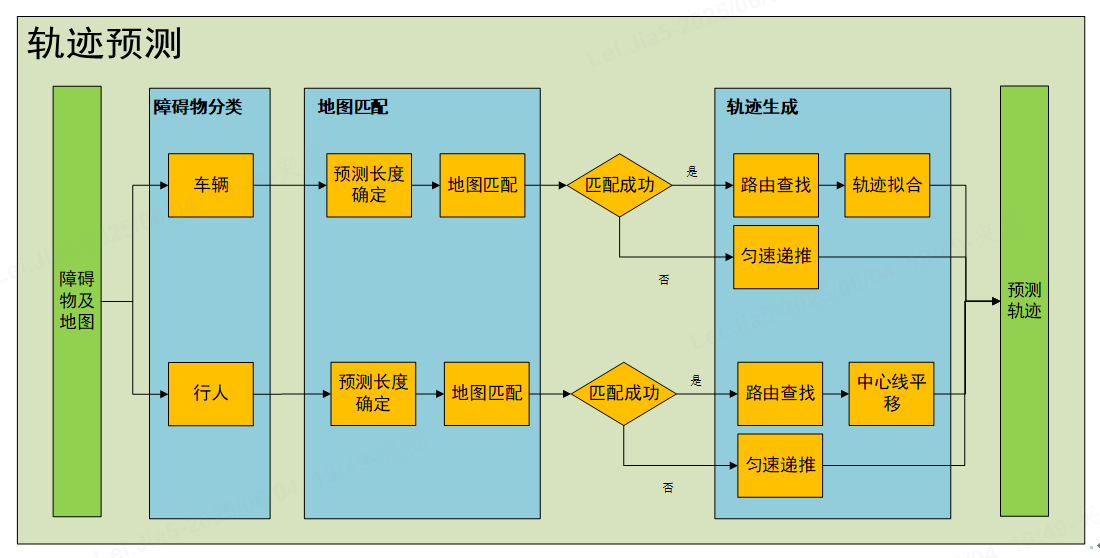
| 轨迹预测 | 障碍物分类 | 障碍物分类 | 根据障碍物类型分成行人和车辆 |
| 地图匹配 | 车道匹配 | 定位障碍物到所有可能的车道 | |
| 地图点匹配 | 在车道中心线上找到与障碍物最匹配的点(考虑位置和运动方向) | ||
| 轨迹生成 | 路由查找 | 根据匹配的车道和中心线上的点,根据地图拓扑结构查找后续所有可以通行的车道序列 | |
| 轨迹拟合 | 根据车道序列以及障碍物姿态,拟合生成轨迹 | ||
| 意图预测 | 障碍物分类 | 障碍物分类 | 根据障碍物类型分成行人和车辆 |
| 轨迹处理 | 轨迹信息计算 | 计算轨迹本身的速度加速度以及曲率信息 | |
| 地图关系计算 | 计算本车轨迹与矢量地图的关系 | ||
| 意图分析 | 轨迹信息分析 | 分析轨迹本身的速度加速度以及曲率信息 | |
| 地图关系分析 | 分析本车轨迹与矢量地图的关系 |
数据处理:
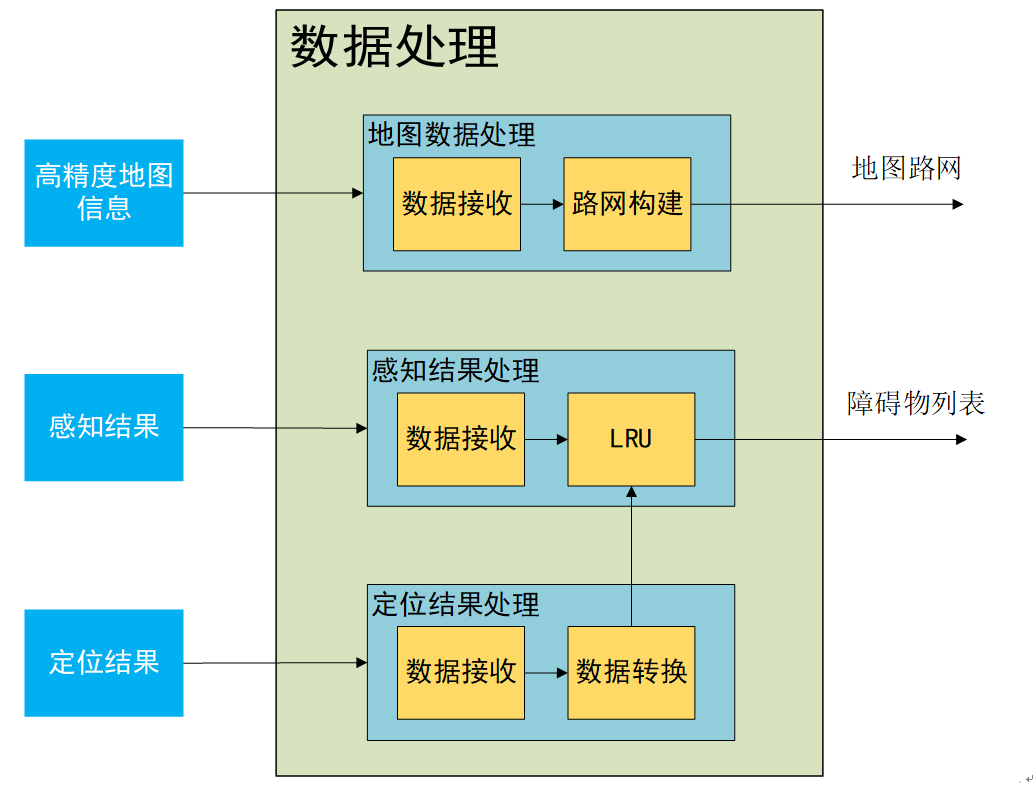
数据处理模块对高精度地图,定位结果,感知障碍物结果进行处理,生成可供预测模块进行轨迹预测的数据格式。高精度地图通过地图数据存储为车道、路口、人行道等信息,并根据地图拓扑关系构建地图路网;感知获得的障碍物信息按照障碍物数据格式使用LRU算法进行存储,保留障碍物的历史轨迹信息,淘汰许久未检测到的障碍物;通过定位结果将本车信息转换为障碍物特征,加入到障碍物列表中。
地图数据处理:
路网构建:RoadNetwork
| 类型 | 定义 |
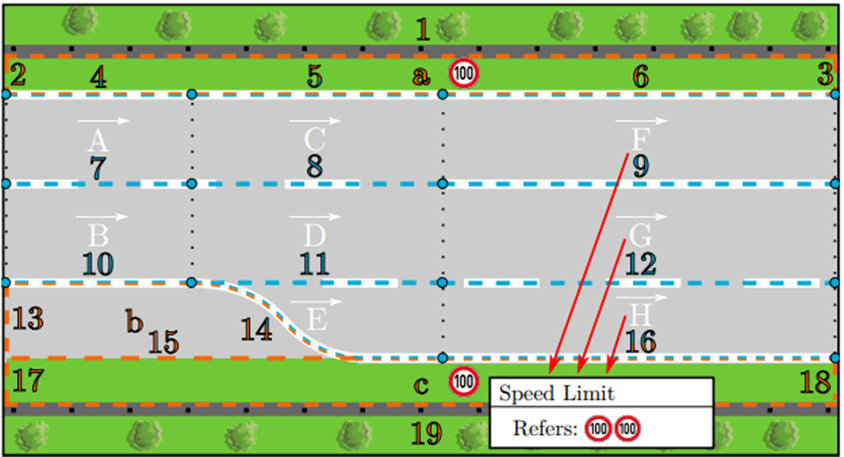
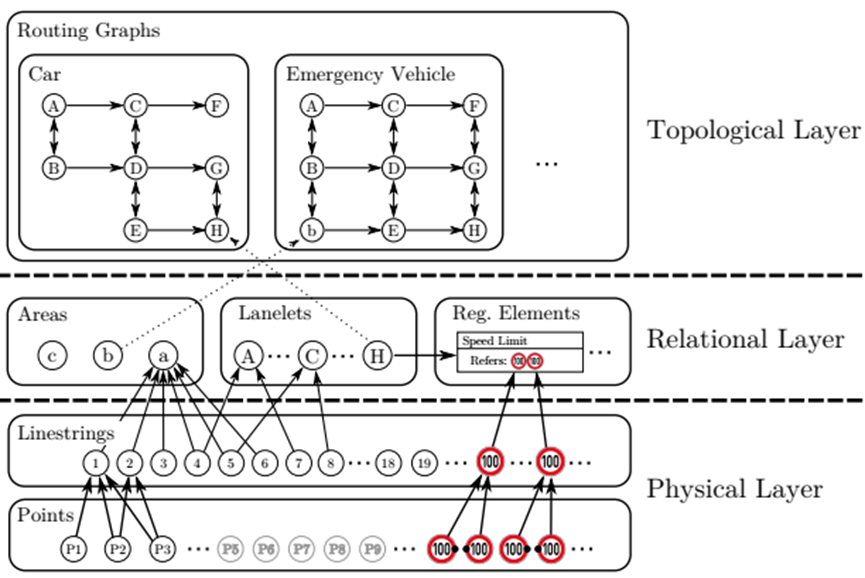
| Points | points由ID,3d坐标和属性组成,是唯一存储实际位置信息的元素,ID必须是唯一的。其他基本元素都是直接或者间接由points组成的。 |
| Linestrings | 线串是两个或者多个点通过线性插值生成的有序数组,用来描述地图元素的形状。线串必须至少包含一个点才能有效,并且不能自相交。它们不能重复包含点。线串必须始终具有type属性,以便可以确定其用途。 |
| Lanelets | Lanelets定义了发生定向运动时,地图车道的原子部分。原子表示沿当前lanelet行驶时,有效的交通规则不会改变,而且与其他Lanelet的拓扑关系也不会更改。 |
| Areas | Areas是地图上没有方向或者是无法移动的部分区域,比如路标,停车位,绿化带等。他们由一条或者多条linestring组成的闭合的区域。 |
| Regulatory elements | regElem是表达交通规则的通用方式,它们由适用的lanelet或Area引用。在应用的时候,regElem 会和一个或者多个Lanelets、Areas相关联。 |
感知结果存储:
根据障碍物的id,使用LRU(Least Recently Used 近期最少使用算法,应用于缓存中的数据淘汰, 其核心思想是"如果数据最近被访问过,那么将来被访问的几率也更高")数据结构来存储障碍物信息。
定位结果处理:
本车作为一个交通参与者,其运动也会同样影响周围其他目标的运动,所以在预测模块中,本车同样会被当做一个障碍物考虑进去。我们接收定位信息后,会提取出我们需要的位置坐标,运动方向,速度信息,转换为障碍物数据。
轨迹预测:
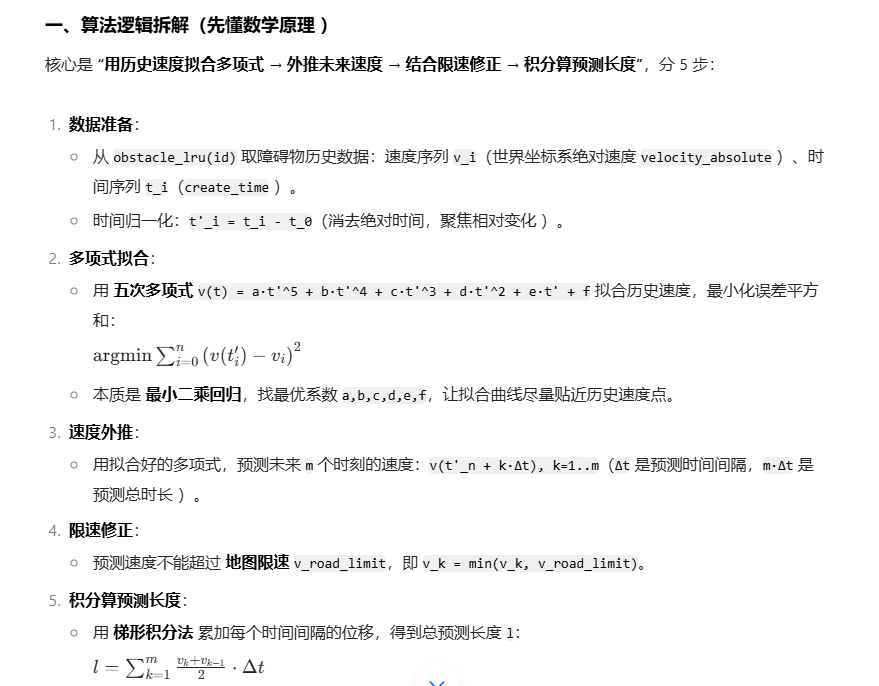
预测长度确定
地图匹配
输入:世界坐标系下,当前障碍物中心点的绝对坐标(center_pos_absolute)以及当前障碍物朝向(box_orientation_absolute);高精度地图路网(RoadNetwork)。
处理:
- 遍历路网中的所有车道(LaneArray),根据车道的边界框与障碍物绝对坐标的位置,进行初步筛选,找出所有覆盖该坐标点的车道
- 对于上一步找出的车道列表,选择是否开启方向过滤(将车道方向与障碍物方向进行比对,筛选去除朝向差别过大的车道)
- 对于上一步筛选出的车道,找出车道中心线和坐标点的最近距离,筛选出一个或者多个目标车道结果
输出:如果匹配成功,返回匹配上的车道列表和道路中心线上的匹配点,以及匹配的距离误差。
意图预测:
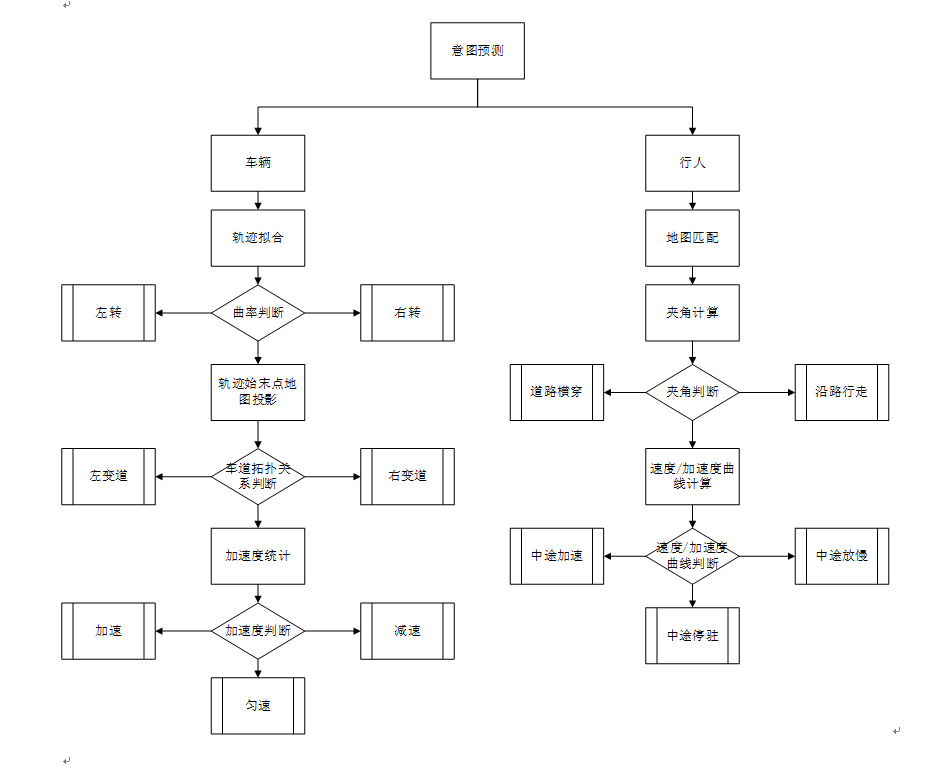
| 目标类型 | 意图 |
| 车辆 | 左转弯,右转弯,左变道,右变道,加速,减速 |
| 行人 | 横穿马路,沿路行走,驶匀速前进、中途停驻、中途加速、中途放慢 |