点云数据去噪(Point Cloud Processing Toolbox)
dt = 0:0.01:1;
[X,Y] = meshgrid(dt ,dt );
ptCloud = pointCloud([X(:),Y(:),0.5*ones(numel(X),1)]);figure
pcshow(ptCloud);
title('原始点云数据');通过以上代码生成点云数据并进行显示: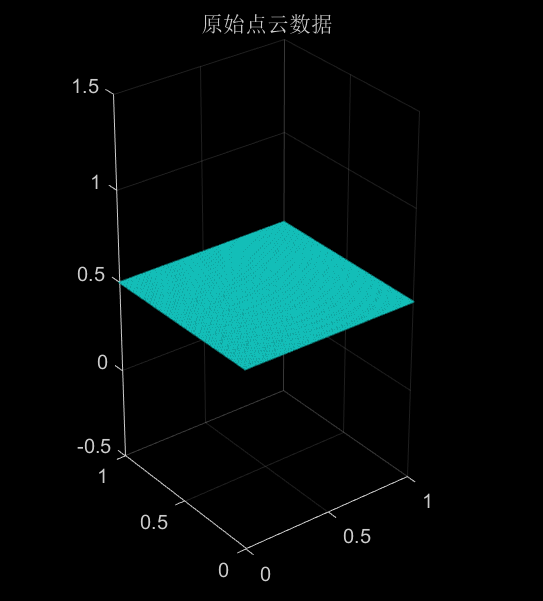
在原有数据上增加噪声,具体代码如下:
noise = rand(500, 3);
ptCloudA = pointCloud([ptCloud.Location; noise]);
figure
pcshow(ptCloudA);
title('增加噪声后数据');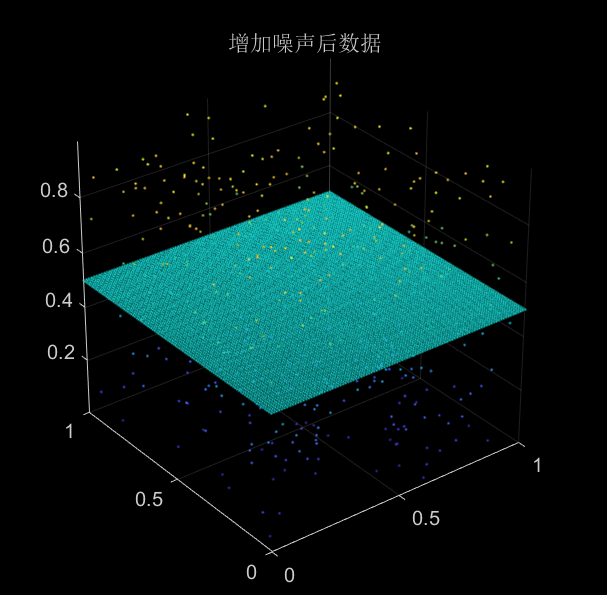
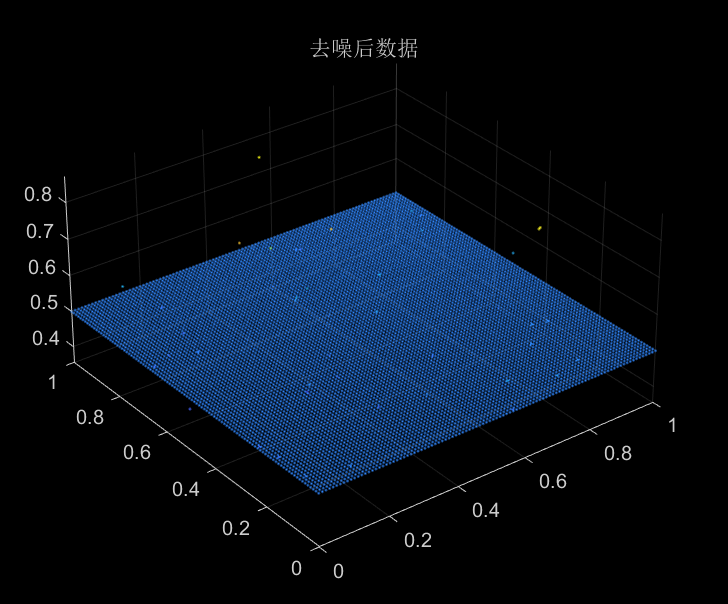
调用Point Cloud Processing Toolbox中的相关函数进行去噪:
ptCloudB = pcdenoise(ptCloudA);figure;
pcshow(ptCloudB);
title('去噪后数据');