【Linux】pthread多线程基础
参考博客:https://blog.csdn.net/Alkaid2000/article/details/128121066
线程概述
-
与进程类似,线程(thread)是允许应用程序并发执行多个任务的一种机制。一个进程可以包含多个线程。同一个程序中的所有线程均会独立执行相同程序,且共享同一份全局内存区域,其中包括初始化数据段、未初始化数据段、以及堆内存段。(传统意义上的Unix进程只是多线程程序的一个特例,该进程只会包含一个线程
-
进程是CPU分配资源的最小单位,线程是操作系统调度执行的最小单位
-
线程是轻量级的进程(LWP:Light Weight Process),在Linux环境下线程的本质仍是进程。
-
查看指定的进程的LWP号:
ps -Lf pid
线程和进程的区别
-
进程间的信息难以共享。由于除去只读代码段外,父子进程并未共享内存,因此必须采用一些进程间通信方式,在进程间进行信息交换。
-
调用fork()来创建进程的代价相对较高,即便存在这写时拷贝的这个技术,仍然需要复制诸如内存页表和文件描述符表之类的多种进程属性,这意味着fork()调用在时间上的开销依然不菲。
-
线程之间能够方便、快速地共享信息。只需将数据复制到共享(全局或堆)变量中即可。创建进程通常要快十倍甚至更多。线程间是共享虚拟地址空间的,无需采用写时复制来复制内存,也无需复制页表。
线程和进程的虚拟地址空间
-
对于进程,由于写时拷贝的技术,当创建了一个子进程的时候,他会进行写时拷贝,把上面的东西再复制一份。
-
但是对于线程,由于其共享内存,所以他不会复制这个表,它只会在栈空间以及代码段将其进行分区,把每个线程都在这个段中分配好自己的内存空间。

线程之间共享的非共享资源
共享资源有如下
进程ID和父进程ID
进程组ID和会话ID
用户ID和用户组ID
文件描述符表
信号处置
文件系统的相关信息:文件权限掩码(umask)、当前工作目录
虚拟地址空间(除栈、.text)
其实以上总的来说是内核的数据。
非共享资源
线程ID
信号掩码
线程特有的数据
error变量
实时调度策略和优先级
栈,本地变量和函数的调用链接信息
NPTL
-
当Linux最初开发时,在内核中并不能真正使用线程。但是它的确可以通过clone()系统调用将进程作为可调度的实体。这个调用创建了调用进程的一个拷贝,这个拷贝与调度进程共享相同的地址空间。LinuxThreads项目使用这个调用来完全在用户空间模拟对线程的支持。不幸的是,这种方法有一些缺点,尤其是在信号处理、调度和进程间同步等方面都存在问题。另外,这个线程模型也不符合POSIX的要求。
-
要改进的LinuxThreads,需要内核的支持,并且重写线程库。有两个相互竞争的项目开始来满足这些要求。一个包括IBM的开发人员的团队开展了NGPT(Next-Generation POSIX Threads)项目。同时,Red Hat的一些开发人员开展了NPTL项目。NGPT在2003年中期被放弃了,把这个领域完全留给了NPTL。
-
NPTL,或称为Native POSIX Thread Library,是Linux线程的一个新实现,它克服了LinuxThreads的缺点,同时也复合了POSIX的需求。与LinuxThreads相比,它的性能和稳定性方面都提供了重大的改进。
-
以查看自己的pthread版本:getconf GNU_LIBPTHREAD_VERSION

创建线程
使用函数pthread_create(),一般情况下,main函数所在的线程我们称之为主线程(main线程),其余创建的线程称之为子线程。程序中默认只有一个进程,使用fork函数进行调用的话,会产生两个进程;程序中默认只有一个线程,pthread_create()函数调用,2个线程。
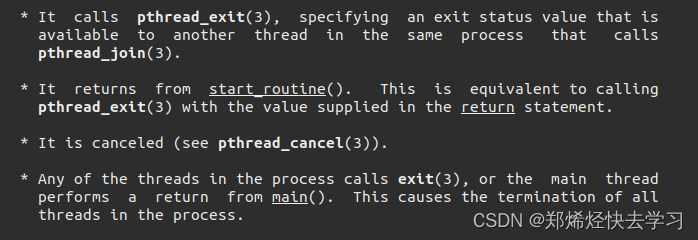
- 在这个函数的说明文档中解释了,线程退出的四个前提:
-
当线程主动调用 pthread_exit(3) 时,需传入一个 “退出状态值”(如动态分配的结果、常量等)。其他线程可通过 pthread_join(3) 阻塞等待该线程结束,并获取这个退出状态。
-
线程从 start_routine(线程函数)返回时,等价于自动调用 pthread_exit(3),返回值会被当作退出状态传递。
-
其他线程调用 pthread_cancel(3) 向该线程发送 “取消请求”,若线程响应取消(默认允许取消且为延迟取消类型),则会终止。
注意:
取消并非 “立即执行”,线程会在 取消点(如 sleep、read 等系统调用,或手动 pthread_testcancel())响应。
被取消的线程,pthread_join 获取的退出状态通常是 PTHREAD_CANCELED(即 (void*)-1 )。 -
若进程中任意线程调用 exit(3),或主线程从 main() 返回,整个进程终止,所有线程(无论是否执行完)都会被强制结束。
区别线程终止与进程终止:
线程终止(如 pthread_exit):仅当前线程结束,其他线程不受影响。
进程终止(如 exit 或 main 返回):所有线程一起终止,进程资源被回收。
-
void *task(void *arg)
{std::cout << "thread starts ..." << std::endl;std::cout << "value is " << *(static_cast<int *>(arg)) << std::endl;std::cout << "thread ends" << std::endl;std::cout << "pid of task :" << pthread_self() << std::endl;std::cout << "task thread finished" << std::endl;return NULL;
}void test1()
{pthread_t thread_id;int value = 100;int ret = pthread_create(&thread_id, NULL, task, static_cast<void *>(&value));if (ret != 0){const char *error = strerror(ret);std::cout << "error: " << error << std::endl;return;}usleep(100000);std::cout << "thread_id = " << thread_id << std::endl;std::cout << "pid of test1:" << pthread_self() << std::endl;for (int i = 0; i < 5; ++i){std::cout << "i = " << i << std::endl;}std::cout << "main finished" << std::endl; // 这里不会打印
}
API 详解:pthread_create()
- 函数原型
int pthread_create(pthread_t *thread, // 输出参数:线程IDconst pthread_attr_t *attr, // 线程属性,NULL表示默认属性void *(*start_routine) (void *), // 线程函数指针void *arg // 传递给线程函数的参数
);
- 返回值:
- 成功:返回 0
- 失败:返回错误码(如 EAGAIN、EINVAL 等)
执行流程
- 主线程创建子线程,传递参数
&value - 子线程打印信息,包括自己的线程 ID(
pthread_self()返回) - 主线程休眠 100ms(
usleep(100000))等待子线程执行 - 主线程继续执行后续代码
关键点
- 线程函数签名:必须是
void* (*)(void*)类型 - 参数传递:通过
void*指针传递,需在函数内部转换回原类型 - 线程 ID:
pthread_t类型,用于标识线程,不同系统实现可能不同 - 错误处理:始终检查
pthread_create()的返回值
API 详解:pthread_self
用于获取当前线程的线程 ID,常用来标识、区分不同线程,或在日志打印等场景记录当前执行线程信息。
函数原型
pthread_t pthread_self(void);
参数说明:无输入参数,直接调用即可获取当前线程的线程 ID。
返回值
返回当前线程对应的 pthread_t 类型的线程标识符,不同系统对 pthread_t 具体实现(如是否为整数、结构体等)有差异,但可用于线程相关操作(如比较线程 ID 等 )。
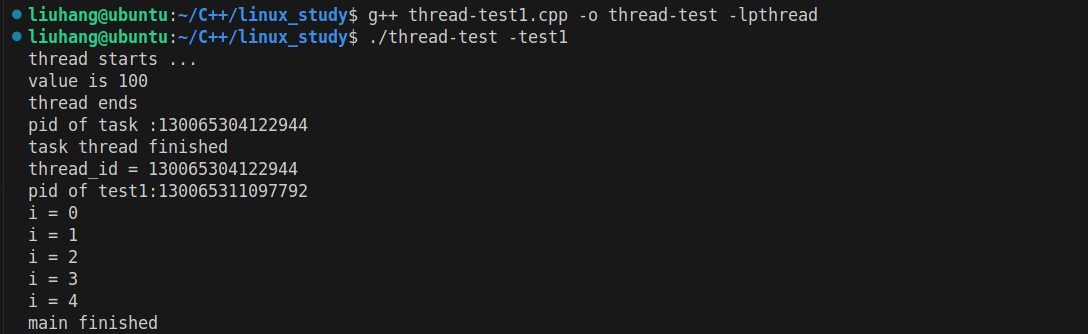
运行结果
- 注意需要引入
pthread库:-lpthread
终止线程
演示线程主动退出的方法,以及pthread_exit()与return的区别
void test2()
{pthread_t thread_id;int value = 100;int ret = pthread_create(&thread_id, NULL, task, (void *)(&value));if (ret != 0){const char *error = strerror(ret);std::cout << "error: " << error << std::endl;return;}usleep(10000);std::cout << "thread_id = " << thread_id << std::endl;std::cout << "pid of test2 :" << pthread_self() << std::endl;ret = pthread_equal(thread_id, pthread_self());std::cout << "equal : thread_id,pthread_self() :" << ret << std::endl;ret = pthread_equal(thread_id, thread_id);std::cout << "equal : thread_id,thread_id:" << ret << std::endl;pthread_exit(NULL); // 当前线程退出std::cout << "main finished" << std::endl; // 这里不会打印
}
核心代码
pthread_exit(NULL); // 终止当前线程
- 参数:
retval:线程的返回值,可通过pthread_join()获取
- 说明:
- 终止当前线程,并将
retval传递给等待该线程的其他线程 - 如果主线程调用
pthread_exit(),其他线程仍会继续执行
- 终止当前线程,并将
执行流程
- 主线程创建子线程后休眠 10ms
- 主线程调用
pthread_equal()比较线程 ID - 主线程调用
pthread_exit()退出,不影响子线程继续执行
关键点
pthread_exit()vsreturn:return:从线程函数返回,效果与pthread_exit()相同pthread_exit():可在任何地方调用,终止当前线程
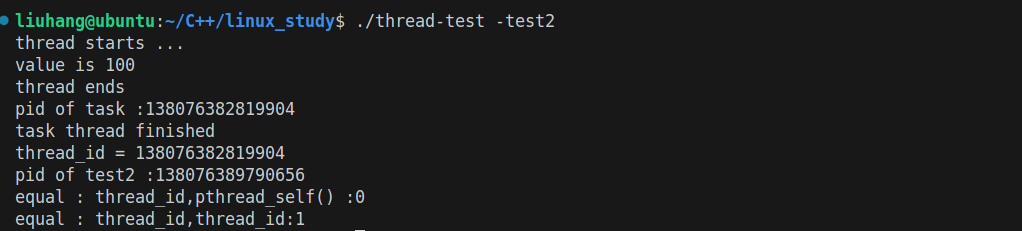
API 详解:pthread_equal
用于比较两个线程 ID 是否属于同一个线程,判断逻辑由系统实现,能帮我们明确不同线程标识是否指向同一实际执行线程。
函数原型
int pthread_equal(pthread_t t1, pthread_t t2);
参数说明:
t1:第一个待比较的线程 ID,通过pthread_create输出参数或pthread_self获取。t2:第二个待比较的线程 ID,来源同t1。
返回值
- 若
t1和t2表示的是同一个线程,返回非 0 值(不同系统实现可能返回具体非零整数,通常可直接用!= 0判断相等 )。 - 若
t1和t2表示不同线程,返回 0 。
运行结果
连接已终止的线程
-
当子进程结束需要回收资源时,需要父进程来进行回收,主动的方式是,尽管父进程结束,它也会调用初始化程序来回收这个子进程,被动的方式是,使用wait或者是waitpid函数来等待子进程结束
-
但是对于线程来说,任意一个线程,都可以回收要结束的线程资源,不一定需要通过父线程。所以为什么需要连接,因为连接后才可以让其资源得到释放,否则会产生僵尸线程
-
演示如何在线程结束时返回数据,并在主线程中获取该数据。
void *task3(void *arg)
{std::cout << "task3 thread_id:" << pthread_self() << std::endl;int *pValue = (int *)malloc(sizeof(int));*pValue = *static_cast<int *>(arg) + 100;pthread_exit(pValue); // 返回地址,实际作为task3的返回值return NULL;
}void test3()
{pthread_t thread_id;int value = 100;int ret = pthread_create(&thread_id, NULL, task3, (void *)(&value));if (ret != 0){const char *error = strerror(ret);std::cout << "error: " << error << std::endl;return;}void *retValue = NULL;ret = pthread_join(thread_id, &retValue); // 阻塞if (ret != 0 || retValue == NULL){if (retValue == NULL){std::cerr << "retValue is NULL" << std::endl;return;}const char *error = strerror(ret);std::cout << "error: " << error << std::endl;return;}std::cout << "retValue = " << *static_cast<int *>(retValue) << std::endl;std::cout << "test3 finished!" << std::endl;free(retValue);
}
核心代码
// 线程函数中
int *pValue = (int *)malloc(sizeof(int));
*pValue = *static_cast<int *>(arg) + 100;
pthread_exit(pValue); // 返回堆上分配的数据// 主线程中
void *retValue = NULL;
pthread_join(thread_id, &retValue); // 获取返回值
std::cout << "retValue = " << *static_cast<int *>(retValue) << std::endl;
free(retValue); // 释放内存
API 详解:pthread_join()
函数原型
int pthread_join(pthread_t thread, // 要等待的线程IDvoid **retval // 输出参数:存储线程的返回值
);
- 返回值:
- 成功:返回 0
- 失败:返回错误码(如 EDEADLK、ESRCH 等)
- 说明:
- 阻塞当前线程,直到指定线程结束
- 获取线程的返回值(通过
pthread_exit()或return设置)
关键点
- 内存管理:
- 线程返回值必须是堆上分配的内存(如
malloc/new) - 栈上分配的内存(如局部变量)在线程结束后会失效
- 线程返回值必须是堆上分配的内存(如
- 类型转换:
- 返回值类型为
void*,需转换回实际类型
- 返回值类型为
- 资源释放:
- 必须手动释放返回的内存,避免内存泄漏
运行结果

线程的分离
- 演示如何将线程设置为分离状态,使其结束后自动释放资源。
void* task4(void *arg)
{std::cout << "task4 started!" << std::endl;sleep(5);std::cout << "task4 finished!" << std::endl;return NULL;
}void test4()
{pthread_t thread_id;int value = 100;int ret = pthread_create(&thread_id, NULL, task4, (void *)(&value));if (ret != 0){const char *error = strerror(ret);std::cout << "error: " << error << std::endl;return;}ret = pthread_detach(thread_id); // 非阻塞std::cout << "pthread_detach!" << std::endl;if (ret != 0){const char *error = strerror(ret);std::cout << "error: " << error << std::endl;return;}ret = pthread_join(thread_id, NULL); // 这里会报错if (ret != 0){const char *error = strerror(ret);std::cout << "error: " << error << std::endl;return;}pthread_exit(NULL);
}
核心代码
pthread_detach(thread_id); // 设置线程为分离状态
API 详解:pthread_detach()
函数原型:
int pthread_detach(pthread_t thread); // 线程ID
-
返回值:
- 成功:返回 0
- 失败:返回错误码(如 EINVAL、ESRCH 等)
-
说明:
- 将指定线程设置为分离状态
- 分离状态的线程结束后,系统自动回收其资源,无需
pthread_join()
执行流程
- 主线程创建子线程(执行
task4,休眠 5 秒) - 主线程调用
pthread_detach()将子线程设置为分离状态 - 主线程尝试调用
pthread_join()等待子线程,失败并输出错误
关键点
-
分离状态特点:
- 不能对分离状态的线程调用
pthread_join() - 适合后台运行且无需返回值的线程(如守护线程)
- 不能对分离状态的线程调用
-
错误处理:
- 分离已分离的线程会失败(返回 EINVAL)
- 对分离状态的线程调用
pthread_join()会失败(返回 EINVAL)
运行结果

线程取消
- 线程检查是否被取消并按照请求进行动作的一个位置。取消点也是线程检测是否被取消的一个位置。
- pthreads标准制定了几个取消点,其中包括:
- 通过pthread_testcancel调用以编程方式建立线程取消点。
- 线程等待pthread_cond_wait或pthread_cond_timewait()中的特定条件。 (错误的程序设计可能会在取消时导致死锁)
- 被sigwait()阻塞的函数。
- 一些标准的库调用。通常,这些调用包括线程可基于阻塞的函数。
那么这个函数pthread_cancel到底做了什么:
- 线程默认是可以被取消的。
- pthread_cancel函数只是给线程发送一个取消请希望可以将线程终止。
- 对于接收请求的线程来说,只是一种建议。
- 接收到的取消请求线程可能会马上停止,也可能不会直到遇到一个取消点之后
下面演示如何请求取消一个线程,并处理取消后的状态
void* task4(void *arg)
{std::cout << "task4 started!" << std::endl;sleep(5);std::cout << "task4 finished!" << std::endl;return NULL;
}void test5()
{pthread_t thread_id;int value = 100;int ret = pthread_create(&thread_id, NULL, task4, (void *)(&value));if (ret != 0){const char *error = strerror(ret);std::cout << "error: " << error << std::endl;return;}sleep(1);std::cout << "thread id before :" << thread_id << std::endl;pthread_cancel(thread_id);std::cout << "thread has benn canceled!" << std::endl;std::cout << "thread id after:" << thread_id << std::endl;void *pValue = NULL;ret = pthread_join(thread_id, &pValue);if (ret != 0){const char *error = strerror(ret);std::cout << "error: " << error << std::endl;return;}if (pValue == NULL){std::cout << "pValue is NULL" << std::endl;}else{std::cout << "pValue address = " << pValue << std::endl;}pthread_exit(NULL);
}
核心代码
pthread_cancel(thread_id); // 请求取消线程
API 详解:pthread_cancel()
函数原型:
int pthread_cancel(pthread_t thread); // 线程ID
- 返回值:
- 成功:返回 0
- 失败:返回错误码(如 ESRCH)
- 说明:
- 发送取消请求给指定线程
- 线程是否响应取消请求取决于其取消状态和类型
执行流程
- 主线程创建子线程(执行
task4,休眠 5 秒) - 主线程休眠 1 秒确保子线程已启动
- 主线程调用
pthread_cancel()请求取消子线程 - 主线程调用
pthread_join()等待子线程结束并获取返回值
关键点
- 取消状态与类型:
- 默认情况下,线程可以响应取消请求(CANCEL_ENABLE)
- 取消类型分为延迟取消(CANCEL_DEFERRED,默认)和立即取消(CANCEL_ASYNCHRONOUS)
- 取消点:
- 线程在某些系统调用(如
sleep()、read())处会检查取消请求 - 可通过
pthread_testcancel()手动设置取消点
- 线程在某些系统调用(如
- 返回值:
- 成功取消的线程通常返回
PTHREAD_CANCELED((void*)-1)
- 成功取消的线程通常返回
运行结果

线程属性
对于结构体pthread_attr_t,这个结构体包含了所有的线程属性的信息。所以我们需要对这个结构体进行操作,才可以更改其进程属性,其实无非就是开辟一块内存,然后存放其相应的信息,主要涉及的函数有如下:
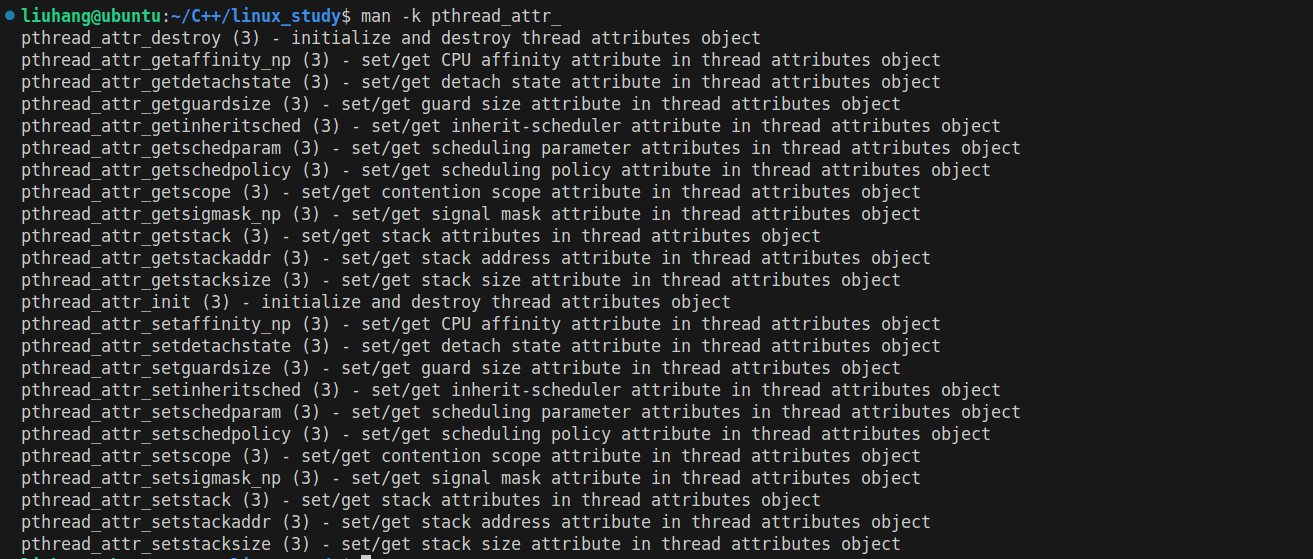
- 通过一下命令可以查看对应的设置属性函数
man -k pthread_attr_
- 演示如何使用线程属性对象(pthread_attr_t)设置线程的分离状态和栈大小。
void* task4(void *arg)
{std::cout << "task4 started!" << std::endl;sleep(5);std::cout << "task4 finished!" << std::endl;return NULL;
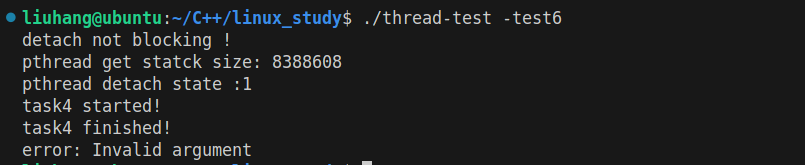
}void test6(){pthread_t thread_id;pthread_attr_t attr;pthread_attr_init(&attr);pthread_attr_setdetachstate(&attr,PTHREAD_CREATE_DETACHED); //设置线程启动属性:detachint value = 100;int ret = pthread_create(&thread_id, &attr, task4, (void *)(&value));std::cout << "detach not blocking !" << std::endl;if (ret != 0){const char *error = strerror(ret);std::cout << "error: " << error << std::endl;return;}size_t size = 0;ret = pthread_attr_getstacksize(&attr,&size);std::cout << "pthread get statck size: " << size << std::endl;int state = 0;ret = pthread_attr_getdetachstate(&attr,&state);std::cout << "pthread detach state :" << state << std::endl;sleep(10);ret = pthread_join(thread_id, NULL); //无法join了if (ret != 0){const char *error = strerror(ret);std::cout << "error: " << error << std::endl;return;}pthread_attr_destroy(&attr);}
核心代码
pthread_attr_t attr;
pthread_attr_init(&attr); // 初始化属性对象
pthread_attr_setdetachstate(&attr, PTHREAD_CREATE_DETACHED); // 设置为分离状态// 创建线程时使用属性对象
pthread_create(&thread_id, &attr, task4, (void *)(&value));// 获取属性信息
size_t size = 0;
pthread_attr_getstacksize(&attr, &size); // 获取栈大小int state = 0;
pthread_attr_getdetachstate(&attr, &state); // 获取分离状态
API 详解:线程属性函数
初始化与销毁:
int pthread_attr_init(pthread_attr_t *attr); // 初始化属性对象
int pthread_attr_destroy(pthread_attr_t *attr); // 销毁属性对象
设置分离状态
int pthread_attr_setdetachstate(pthread_attr_t *attr, // 属性对象int detachstate // 分离状态:PTHREAD_CREATE_DETACHED 或 PTHREAD_CREATE_JOINABLE
);
int pthread_attr_getdetachstate(pthread_attr_t *attr, // 属性对象int *detachstate // 输出参数:当前分离状态
);
设置栈大小
int pthread_attr_setstacksize(pthread_attr_t *attr, // 属性对象size_t stacksize // 栈大小(字节)
);
int pthread_attr_getstacksize(pthread_attr_t *attr, // 属性对象size_t *stacksize // 输出参数:当前栈大小
);
执行流程
- 初始化线程属性对象并设置为分离状态
- 使用该属性创建线程
- 获取并打印线程的栈大小和分离状态
- 主线程休眠 10 秒,等待子线程执行(虽然子线程是分离的)
- 尝试
pthread_join()已分离的线程,失败并输出错误
关键点
- 属性对象生命周期:
- 使用前必须初始化(
pthread_attr_init()) - 使用后必须销毁(
pthread_attr_destroy())
- 使用前必须初始化(
- 分离状态的两种设置方式:
- 创建线程后调用
pthread_detach() - 创建线程前通过属性对象设置(
PTHREAD_CREATE_DETACHED)
- 创建线程后调用
- 栈大小:
- 默认栈大小由系统决定(通常为几 MB)
- 可通过
pthread_attr_setstacksize()调整,需注意栈溢出风险
运行结果
更多资料:https://github.com/0voice