CloudCompare——点云统计滤波
目录
1.统计滤波算法原理
2.CloudCompare实现点云统计滤波
1.统计滤波算法原理
统计滤波的算法原理和 Open3D 实现代码可以看我的另一篇博客:
Open3D 统计滤波器-CSDN博客文章浏览阅读916次,点赞6次,收藏12次。点云统计滤波器,全称是,是点云处理中最常用的去噪方法之一,用于去除明显的离群点。其核心思想是通过计算每个点与领域点的距离分布特征,剔除掉不符合统计规律的离群点,此去噪算法特别适合去除激光雷达或深度相机采集点云时所采集到的孤立噪点。_统计滤波器https://blog.csdn.net/m0_55908255/article/details/148119391?spm=1011.2415.3001.5331
2.CloudCompare实现点云统计滤波
① 框选出点云,然后点击右上角的 SOR 按钮,如下所示:
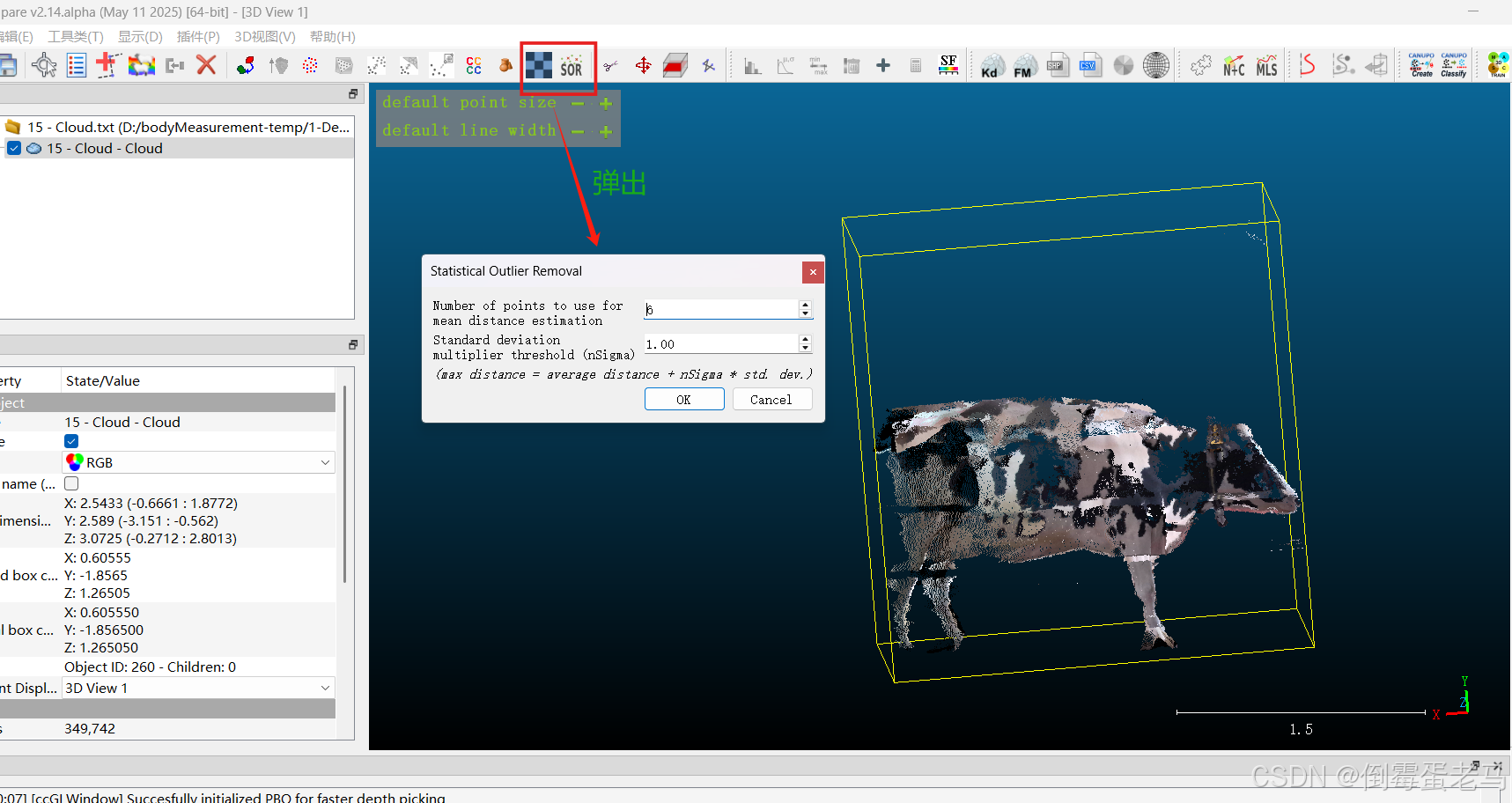
② 选择邻点个数 和 标准差倍数
,点击 OK 按钮即可,如下 GIF 所示:
生成的新文件即为原牛体采用统计滤波之后的点云文件
🆗,以上就是本文的所有内容