15.进程间通信(一)
一、进程间通信介绍
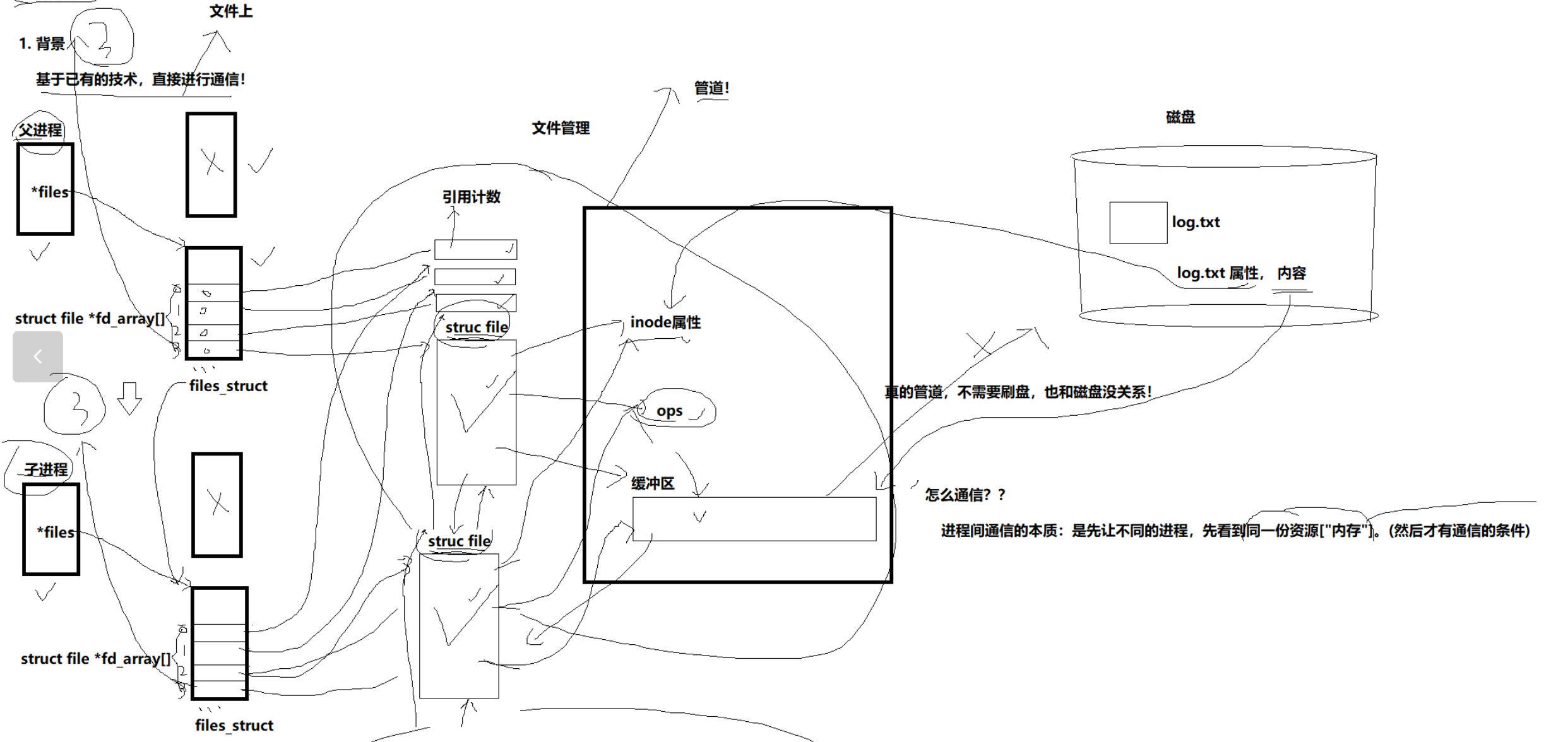
进程间通信目的:数据传输:一个进程需要将它的数据发送给另⼀个进程资源共享:多个进程之间共享同样的资源。通知事件:一个进程需要向另一个或一组进程发送消息,通知它(它们)发生了某种事件(如进程终止时要通知父进程)。进程控制:有些进程希望完全控制另一个进程的执行(如Debug进程),此时控制进程希望能够拦截另一个进程的所有陷入和异常,并能够及时知道它的状态改变。怎么通信?进程间通信本质:先让不同的进程,看到同一份资源(内存)(然后才有通信的条件)不能由任何一个进程提供,进程间数据隔离->OS提供系统调用->设计统一的通信接口。什么是通信?
二、具体通信方式
1)基于文件的,管道通信
2)System V 本机通信
1.背景
基于已有的技术,直接进行通信。
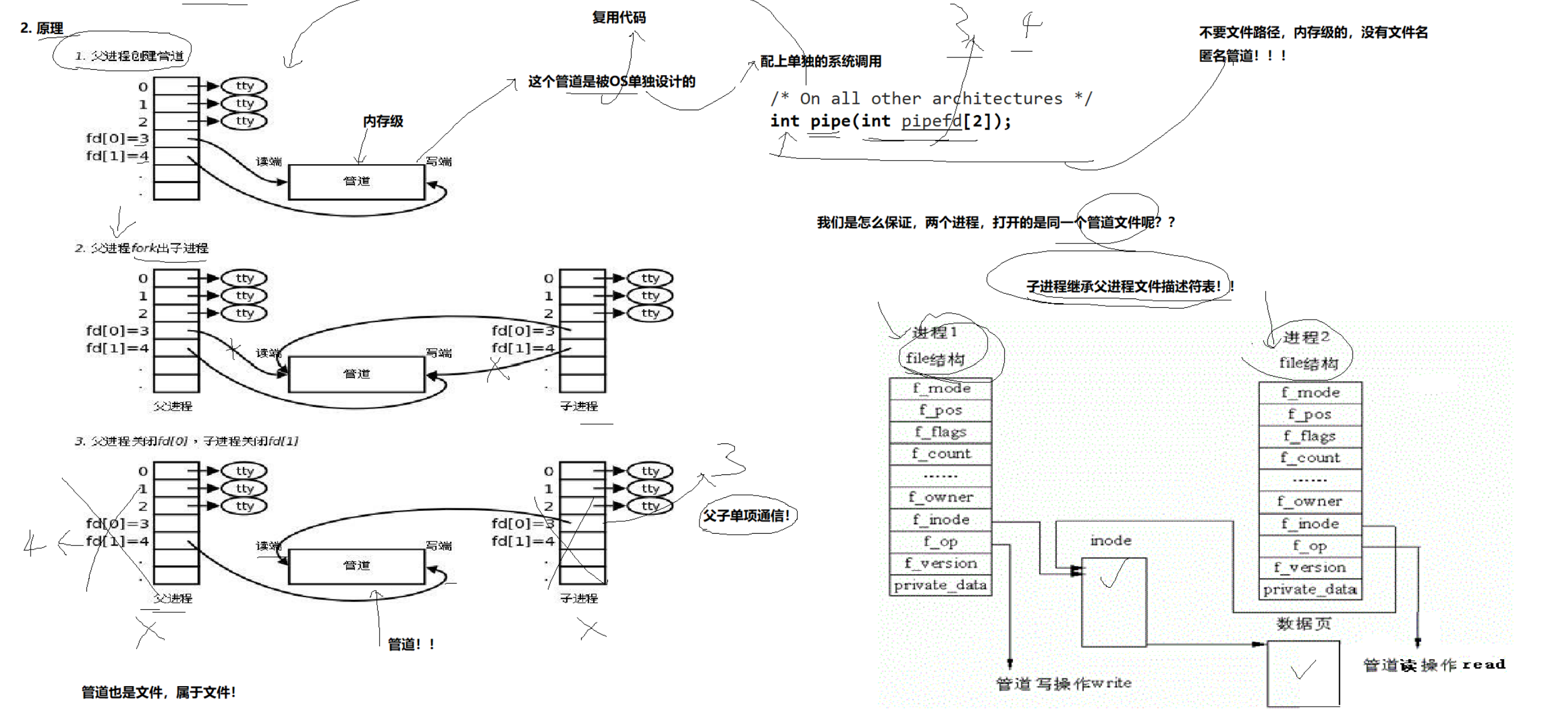
2.原理
单独设计了一个内存级的文件,管道(复用了文件管理的代码)。
独特的系统调用:
/* On all other architectures */
int pipe(int pipefd[2]); //数组第一个参数是读的fd,第二个参数的写的fd。
返回值:成功返回0,失败返回-1,错误码被设置。
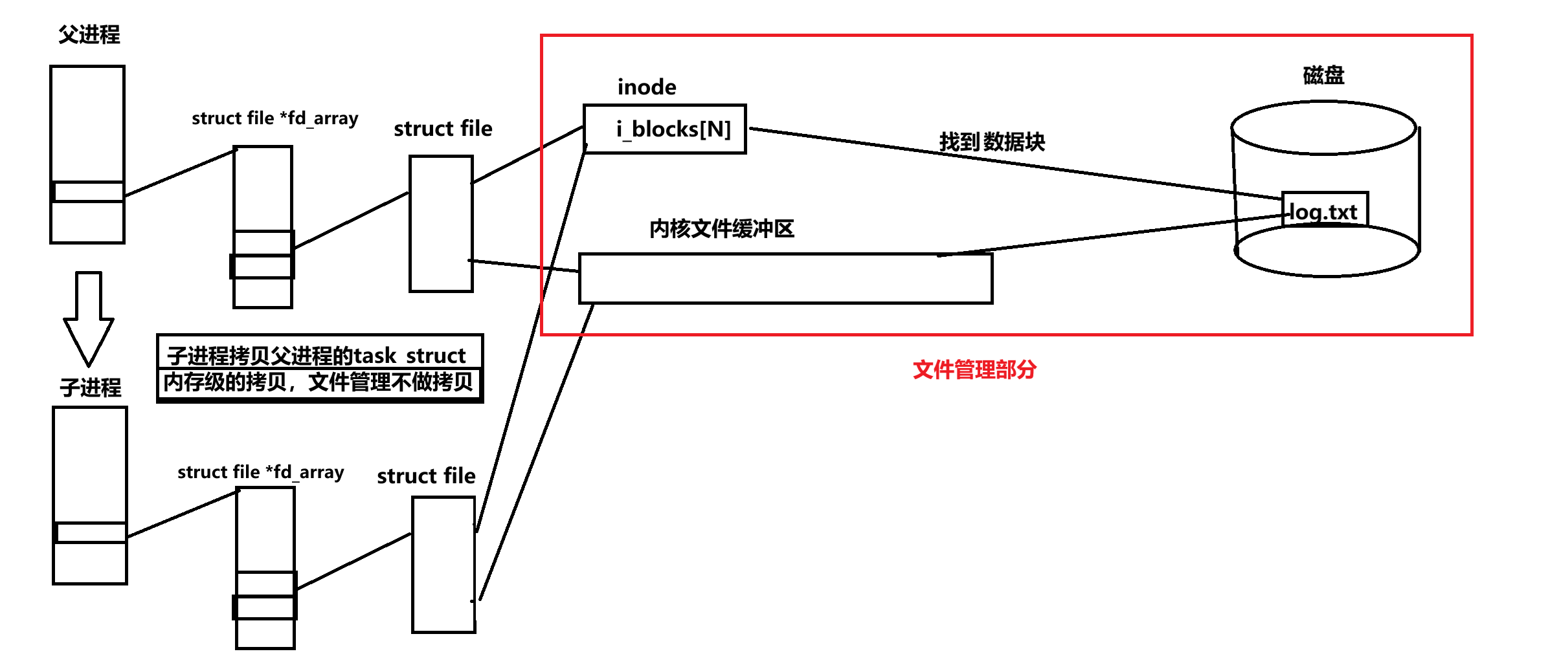
管道:通过创建子进程,子进程拷贝一份和父进程一样的文件描述符表,指向同一个“文件”(管道),关闭相应的读写端,使得单向通信。
3.demo代码,测试接口。
测试代码如下:
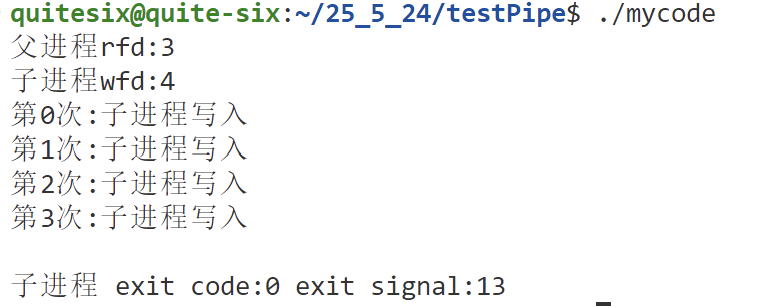
#include <iostream> #include <cstdio> #include <cstdlib> #include <cstring> #include <unistd.h> #include <sys/types.h> #include <sys/wait.h>void ChildWrite(int wfd) {std::cout << "子进程wfd:" << wfd << std::endl;char buff[1024];int cnt = 0;while (true){sleep(1);snprintf(buff, sizeof(buff), "第%d次:子进程写入\n", cnt++);ssize_t ret = write(wfd, buff, strlen(buff));(void)ret;} }void FatherRead(int rfd) {std::cout << "父进程rfd:" << rfd << std::endl;char buff[1024];int cnt = 1;while (cnt--){sleep(5);ssize_t ret = read(rfd, buff, sizeof(buff) - 1);buff[ret] = 0;std::cout << buff << std::endl;if (ret == 0){std::cout << "写关闭了,读关闭" << std::endl;break;}} }int main() {// 1.创建管道int pipefd[2] = {0};int ret = pipe(pipefd);if (ret == -1)exit(1);// 2.创建子进程,子进程写,父进程读pid_t pid = fork();if (pid < 0)exit(1);else if (pid == 0){// 子进程close(pipefd[0]);ChildWrite(pipefd[1]);close(pipefd[1]);exit(0);}else{// 父进程close(pipefd[1]);FatherRead(pipefd[0]);close(pipefd[0]);int status;waitpid(pid, &status, 0);std::cout << "子进程 exit code:" << ((status >> 8) & 0xFF) << " exit signal:" << (status & 0x7F) << std::endl; }return 0; }5种特性(重点):
1)匿名管道,只能用来进行具有血缘关系的进程进行进程间通信(常用于父子)
2)管道文件,自带同步机制
3)管道是面向字节流的。(怎么读和怎么写没有必然关系)
4)管道是单向通信的。
属于半双工的一种特殊情况。
半双工:任何时刻,一个发,一个收。
全双工:任何时刻,可以同时收发(吵架)。
5)(管道)文件的生命周期是随进程的(引用计数)。
4中通信情况:
1)写慢,读快 ------ 读端就要阻塞(进程)
2)写快,读慢 ------ 满了的时候,写端就要阻塞等待
3)写关,读继续 ------ read读到返回值为0,表示文件结尾。
4)写继续,读关 ------ 写端写入无意义,OS不会做无意义的事情->OS会杀掉写端进程->发送异常信号 13 SIGPIPE
在小于pipe_buf时,管道的写入被要求是原子性的(一次要写全写完)。
测试管道容量:一次写一个字节,写入测试信息。


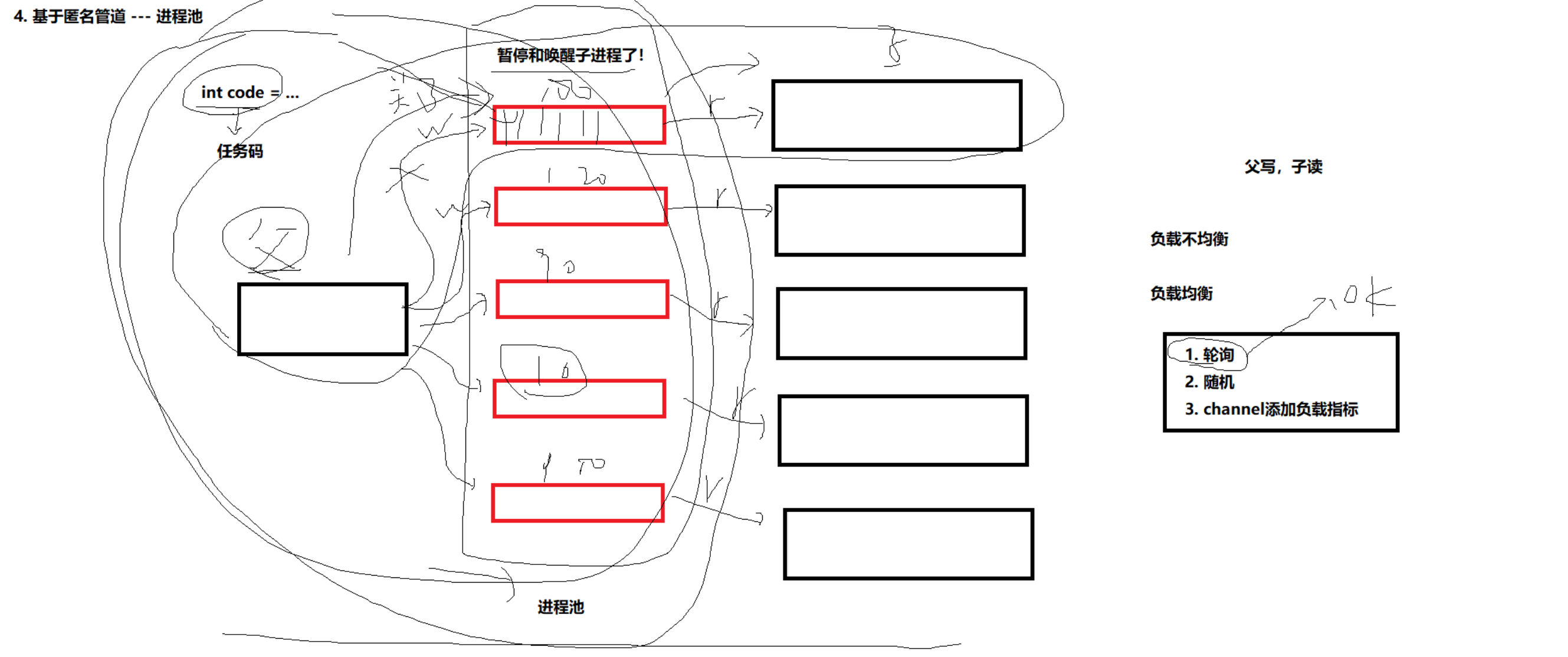
4.基于匿名管道 --- 进程池
原理:
父进程通过向指定的管道写入的方式来向子进程发送对应的任务。
父进程的wfd关闭,子进程会读到0,可以退出。
总体结构:
要对匿名管道进行管理,先描述在组织,要有对应的类Channel,记录父进程的wfd和子进程的pid,在有对应管理多个类Channel的数据结构vector,对于匿名管道的管理就转换成了对于vector的增删查改。对于任务也做管理,与匿名管道管理类似。
逻辑:
父进程创建若干个子进程,让子进程阻塞在read中,并死循环执行,子进程一直阻塞,等待父进程发送对应的任务码,根据任务码执行相应的任务。父进程采用轮询的方式,确保能够负载均衡,选择子进程发送随机的任务码,即向对应的匿名管道内写入任务码。
易错点:
回收时需注意,每次创建子进程时,子进程会继承上一次父进程的wfd,导致第1个管道有n个引用,第2个管道有n-1个引用 ... 第n个管道有一个引用。
解决方法1:倒着关闭
解决方法2:随便关闭。创建子进程后,子进程把之前从父进程继承下来的wfd全部关闭。
完整代码如下:
Processpool.hpp
#pragma once#include <vector> #include <cstdlib> #include <cstdio> #include <unistd.h> #include <sys/types.h> #include <sys/wait.h> #include "Task.hpp"class Channel { public:Channel(int wfd, int pid): _wfd(wfd), _pid(pid){}~Channel(){}int Wfd() const { return _wfd; }int Pid() const { return _pid; }void Close() const { close(_wfd); }void Wait() const { waitpid(_pid, nullptr, 0); }private:int _wfd; // 控制子进程int _pid; // 拿到子进程pid,方便回收 };class ChannelManager { public:ChannelManager() : _next(0){}// 为了保证负载均衡,采用轮询的方式const Channel& SelectChannel(){const Channel& c = _channels[_next];// 选出下标++_next;_next %= _channels.size();return c;}void InsertChannel(int wfd, int pid){_channels.emplace_back(wfd, pid);}void CloseFd() const{for(const auto &e : _channels){e.Close();}}void CloseChannels() const{// 2.正着关,创建子进程时就关闭从父进程继承下来的wfdfor (size_t i = 0; i < _channels.size(); i++){// 关闭父进程的写fd,让子进程读到0个字节退出。_channels[i].Close();_channels[i].Wait();printf("等待成功,回收了子进程:%d\n", _channels[i].Pid());}// // 1.倒着关闭// for (int i = _channels.size() - 1; i >= 0; i--)// {// // 关闭父进程的写fd,让子进程读到0个字节退出。// _channels[i].Close();// _channels[i].Wait();// printf("等待成功,回收了子进程:%d\n", _channels[i].Pid());// }}~ChannelManager(){}private:std::vector<Channel> _channels;int _next; };class ProcessPool { public:ProcessPool(){}~ProcessPool(){}void ChildRead(int rfd) const{int taskcode = 0;while (true){ssize_t ret = read(rfd, &taskcode, sizeof(taskcode));// 父进程写端关闭了,子进程要结束if (ret == 0){std::cout << "父进程写端关闭,子进程:" << getpid() << "退出" << std::endl;break;}// 读到的不是4字节,丢弃,重新读if (ret != sizeof(taskcode)){printf("丢弃\n");return;}// 执行相应任务printf("进程:%d ExcuteTask开始,ret:%d,taskcode:%d\n", getpid(), (int)ret, taskcode);_tm.ExecuteTask(taskcode);}}void Create(int num){for (int i = 0; i < num; i++){// 1.创建管道int pipefd[2] = {0};int ret = pipe(pipefd);if (ret != 0)exit(1);// 2.创建子进程pid_t pid = fork();// 3.关闭父读,子写if (pid < 0)exit(1);else if (pid == 0){// 关掉从父进程继承下来的wfd_cm.CloseFd();// 子进程关闭写close(pipefd[1]);// 子进程工作printf("ChildRead开始,进程为%d\n", getpid());ChildRead(pipefd[0]);close(pipefd[0]);// 子进程完成工作,退出exit(0);}// 父进程关闭读close(pipefd[0]);// emplace_back直接构造,插入到_channels_cm.InsertChannel(pipefd[1], pid);// 循环num次}}// 选择一个子进程,随机发送任务void Run(){// 1.选择一个子进程const Channel &c = _cm.SelectChannel();printf("挑选的子进程为:%d\n", c.Pid());// 2.获取任务码int taskcode = _tm.TaskCode();// 3.发送任务码给子进程,子进程执行(写给子进程)printf("父进程:%d 写入taskcode:%d\n", getpid(), taskcode);ssize_t ret = write(c.Wfd(), &taskcode, sizeof(taskcode));}void Close() const{_cm.CloseChannels();}private:TaskManager _tm;ChannelManager _cm; };task.hpp
#pragma once#include <iostream> #include <cstdio> #include <vector> #include <cstdlib> #include <ctime>void Open() {std::cout << "这是一个打开的任务" << std::endl; } void Download() {std::cout << "这是一个下载的任务" << std::endl; } void Upload() {std::cout << "这是一个上传的任务" << std::endl; }typedef void (*task_t)(); class Task { public:Task(task_t task) : _task(task){}~Task(){}void operator()() const{_task();}task_t getTask() const {return _task;} private:task_t _task; };class TaskManager { public:TaskManager(){// 设置种子数,采用随机任务形式srand((unsigned)time(nullptr));Register(Open);Register(Download);Register(Upload);}// 注册任务void Register(task_t t){_tasks.emplace_back(t);}// 返回任务码int TaskCode() const{int ret = rand() % _tasks.size();return ret;}void ExecuteTask(int taskcode) const{if (taskcode < 0 || taskcode >= _tasks.size()){std::cout << "读取的任务码无效" << std::endl;return;}printf("进程:%d执行任务,taskcode为:%d\n",getpid(),taskcode);_tasks[taskcode]();printf("任务:%d 执行完毕\n",taskcode);}~TaskManager(){}private:std::vector<Task> _tasks; };main.cc
#include <iostream> #include <unistd.h> #include <sys/wait.h> #include "ProcessPool.hpp"int main() {pid_t pid = fork();if (pid == 0){ProcessPool pool;pool.Create(5);int cnt = 5;while (cnt--){sleep(1);pool.Run();}sleep(10);pool.Close();exit(0);}int status;waitpid(pid, &status, 0);std::cout << "main exit code:" << ((status >> 8) & 0xFF) << " signal code:" << (status & 0x7F) << std::endl;return 0; }