电机控制储备知识学习(五) 三项直流无刷电机(BLDC)学习(四)
目录
- 电机控制储备知识学习(五)
- 一、三项直流无刷电机(BLDC)学习(四)
- 1)软件方法控制电机转速
- 2)PWM概念和PWM的产生
- 3)转子位置检测和霍尔传感器的工作原理分析
- 4)霍尔传感器安装角度和电角度的概念
- 附学习参考网址
- 欢迎大家有问题评论交流 (* ^ ω ^)
电机控制储备知识学习(五)
一、三项直流无刷电机(BLDC)学习(四)
1)软件方法控制电机转速
-
KV值
"KV值”是一个常用的参数,它表示电机的转速常数。KV值定义为电机在无负载条件下,每增加1伏特电压时,电机转速增加的转数(rpm)。换句话说,KV值是电机转速与供电电压之间的比例系数。 -
电机U、V、WN三相线上如何调整电压值
MOS的导通时间与关断时间(PWM)
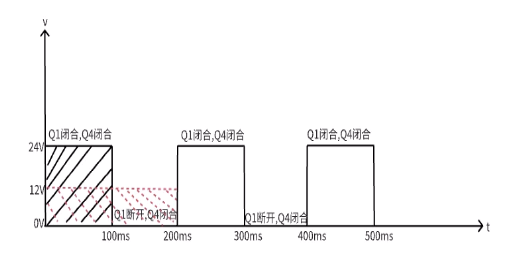
图1 设置电机电压为12V
-
周期、占空比概念的引入
通过上述我们控制Q1的闭合时间和断开时间进行U、V俩端电压的计算把Q1的闭合时间和Q1的断开时间总时间称为周期T,所以周期是200ms
把Q1的闭合时间也就是24伏持续的时间称为高电平持续时间,高电平持续时间和周期的比值称为占空比占空比(Duty),简称为D -
通过MCU产生PWM,控制三相桥的闭合和断开时间,就可以控制电机某两相绕组的电压,从而控制。电机转速
2)PWM概念和PWM的产生
基础内容详见本人的文章
-
PWM产生方法
- 微控制器(MCU):MCU内部一般都内置了PWM生成功能。
- FPGA(可编程逻辑门阵列):用户可以通过编写程序来设计自己PWM波形生成器,FPGA生成的PWM信号精度高,适用于需要高频率、高精度PWM信号的场合
- 数字信号处理器(DSP):DSP通常都会有包含生成PWM信号的硬件模块,主要针对复杂波形、高分辨率高频率等场景
- 独立的PWM控制芯片:有一些专门生成PWM控制的芯片,TI的UC3825等。这些芯片功能都比较单用,用在特定的使用场景。
- 模拟电路:可以通过一些基本的模拟电路元件,比如555定时器、运放、比较器等模块搭建电路生成PWM信号。一般用在控制精度不高、低成本、产品简单的使用场景
-
PWM控制3相H桥MOS的核心元器件:预驱
- MCU输出的PWM高电平电压是3.3V的
- 本课程中的N沟道MOS的导通我们从前面的内容知道Vgs(栅极和源极)电压要大于Vth阈值电压才能完全导通,而这个Vth电压需要大于等于10V,小于等于25V
- 所以单片机输出的PWM直接控制MOS的导通是做不到的,因为3.3V电压小于Vth 10V电压
- 所以我们通过FD6288T这个预驱IC将PWM的3.3V电压转换为能够驱动MOS导通的电压
3)转子位置检测和霍尔传感器的工作原理分析
-
为什么需要知道转子的位置?
因为在电机启动前我们需要知道转子当前的位置,才能确定H桥MOS的导通关系(或者说才能确定电机U、V、W 3相线中哪2相需要导通) -
检测转子初始位置的传感器:霍尔传感器

图2 霍尔传感器 -
霍尔效应(Hall Effect)是一种物理现象,由美国物理学家埃德温·霍尔于1879年发现。它描述了当电流通过一个导体或半导体材料,并且该材料处于垂直于电流方向的磁场中时,会在材料的两侧产生一个电压差(称为霍尔电压)。霍尔电压是非常小的
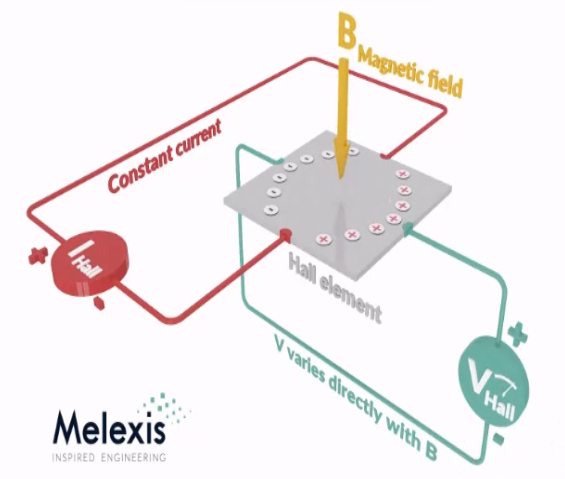
图3 霍尔效应原理图
-
霍尔电压计算公式
V H = R H I × B d V_H = R_H\frac{I \times B}{d } VH=RHdI×B
d是霍尔元器件的厚度,RH是霍尔系数,取决于材料 -
霍尔传感器的磁场变化输出分析
- 霍尔传感器的分类
- 模拟类霍尔传感器:将霍尔电压通过运放等元器件将电压放大后输出(分析复杂)
- 数字类霍尔传感器:将霍尔电压通过运放等元器件放大结合比较器等电路输出开关量信号(一般用这个)
- 数字类霍尔传感器检测磁场变化分析
- 霍尔传感器检测到N极,输出高电平
- 霍尔传感器检测到S极,输出低电平
- 霍尔传感器的分类
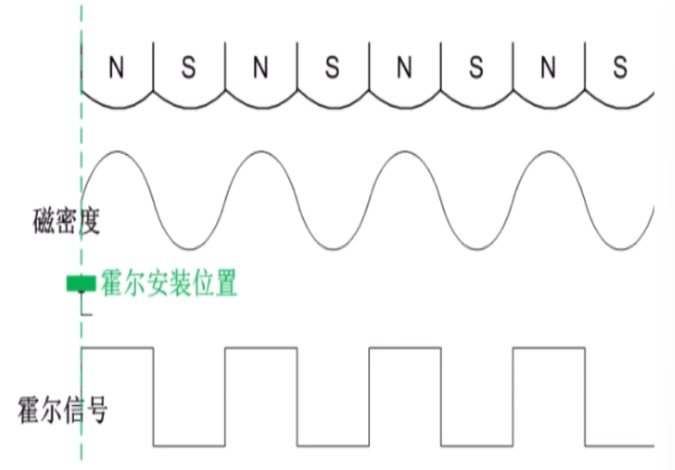
图4 霍尔传感器检测到的磁场变化和输出信号
- 因此,可以通过霍尔传感器确定电机内部转子的位置
4)霍尔传感器安装角度和电角度的概念
-
电机的极数与槽数
在电机领域,会用极数、槽、齿这类词语来描述电机的特点
齿:进行绕线的地方称为齿
槽:齿和齿之间的空间部分
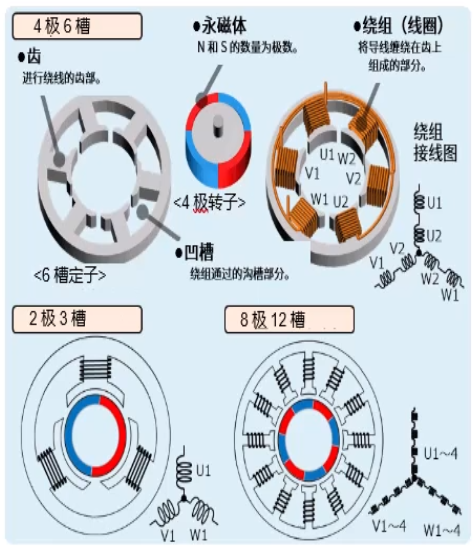
图5 电机的极数与槽数 -
电角度和机械角度
由于极数差异产生了电角度(电周期)和机械角度的概念- 机械角度:机械角度就是电机转子旋转一圈的空间几何角度,转子轴从从某个位置旋转并回到原始位置的角度是360度
- 电角度:电角度是将对绕组(线圈)施加电压的开关的一个切换周期视为360度。6步换相一个周期视为360度电角度,
前面课程中我们所有的分析都是按照一对极也就是1个N极1个S极作为理论分析的- 1对极(2极)的时候:机械角度为360度,电角度为360度
- 2对极(4极)的时候:机械角度为360度,电角度是2个电周期,为720度
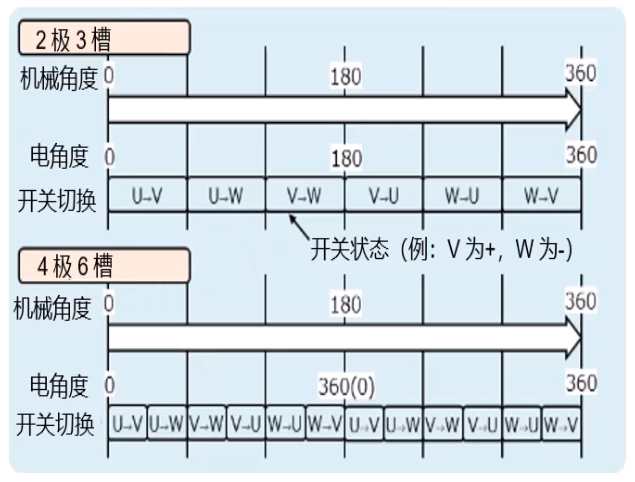
图6 电角度
-
注意:我们所有软件控制算法中所说的角度都是以电角度为理论来讲解的。比如说我们的实际的转子的转速计算。实际转子的转速计算“也就是转速表测试出来的那个转速)基础公式推导就是按照电角度来进行推导的,最终得出一个转子的转速。
-
电角度和机械角度的转换计算公式
电角度 = 机械角度 * 极对数- 总结1:电角度的理解实际上是非常抽象的,很多的论文或书籍给出的解释不是很相同。这里大家只需要记住电角度和机械角度与极对数的关系就可以。
- 总结2:机械角度就是固定的360度不变的,就是转子实际旋转一圈的角度
-
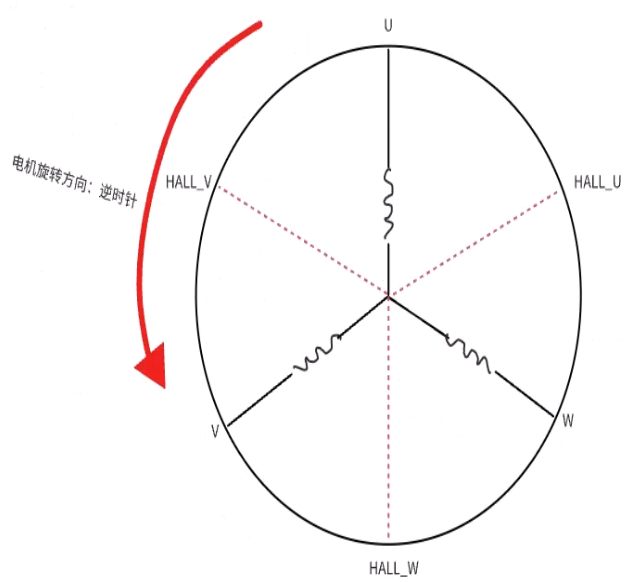
霍尔传感器的安装位置
- 霍尔传感器的作用:检测直流无刷电机中转子的位置的
- 霍尔传感器的安装位置:120度电角度的安装
1对极安装方式:三个霍尔传感器安装电角度是间隔120度,安装机械角度是间隔120度
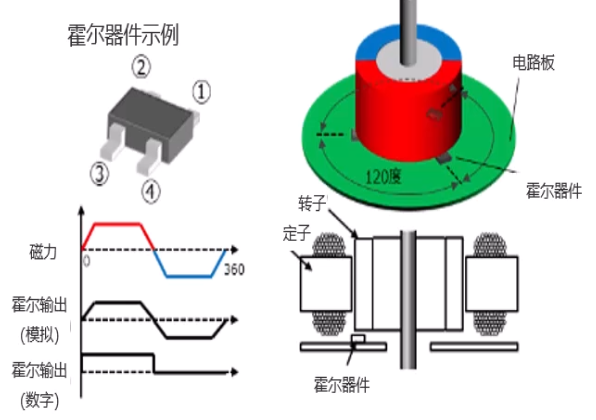
图7 霍尔器件的安装位置
-
霍尔传感器还有60度电角度安装的,60度电角度安装平时见到的比较少,感兴趣的同学可以作为一个了解
-
总结:霍尔传感器的安装角度和电机本体的设计有非常大的关联,分析这些并非我们擅长。作为电机算法工程师,我们只需要懂得霍尔传感器的工作原理,霍尔传感器的安装电角度,霍尔传感器安装电角度和机械角度的转换关系就可以。
附学习参考网址
长话短说:剖析霍尔传感器是如何用于电机测速的