Halcon计算点到平面的距离没有那么简单
Halcon计算点到平面距离
- 1. 一些基本概念
- 2. 浅谈有无符号的距离
- 2.1 无符号距离的用武之地
- 2.2 有符号距离的必要性
- 3. 无符号距离怎么算
- 3.1 创建一个无限延展的基准平面,对距离有什么影响?
- Halcon代码
- 图示
- 3.2 创建一个小小小的基准平面,对距离有什么影响?
- halcon代码
- 图示
- 3.3 直接使用点云拟合基准平面,可行吗?
- halcon代码
- 图示
- 4. 有符号距离怎么算
- 4.1 诡异的平面法向量方向
- 4.1.1 下面的halcon代码展示了如何获得平面单位法向量,或者说如何获得平面方程一般式 A、B、C、D
- 4.1.2 Halcon如何解释 A、B、C、D
- 4.1.3 我们如何理解A、B、C、D
- 4.1.4 如何修改法向量
- 4.2 封装计算带符号距离的方法
- 4.3 全部测试代码
1. 一些基本概念
- 三维点:就是三维空间中的点(X,Y,Z)
- 平面:三维空间中的平面
- 平面方程:一般式:AX+BY+CZ+D=0
- 点到平面距离:过点做平面垂线,点到垂足的距离。(投影)
2. 浅谈有无符号的距离
2.1 无符号距离的用武之地
- 不带符号的距离相对简单,它不用理会平面方程法向量的方向,以及坐标系原点与平面之间的关系。
- Halcon中有很好用的算子,只需要设置合适的参数,就能非常方便的计算出三维点到平面的距离。
- 当然这个距离是没有符号的,也就是说你是无法通过这个距离来判断点与平面的位置关系的。点在平面上方, 还是在平面下方?(平面的上方下方这种表达并不准确,应该和平面法向量方向作比较)。那么这种计算距离的方法还有用武之地吗?当然,如果你确定你测量的点一定在基准面的一侧,那么你就可以放心大胆的使用此方法了,不是吗?
- 下图中,如果你想测量黑色元器件到PCB板的相对高度(距离),使用这种方法就非常合适,因为元器件上表面上的点到PCB的距离不可能小于0。
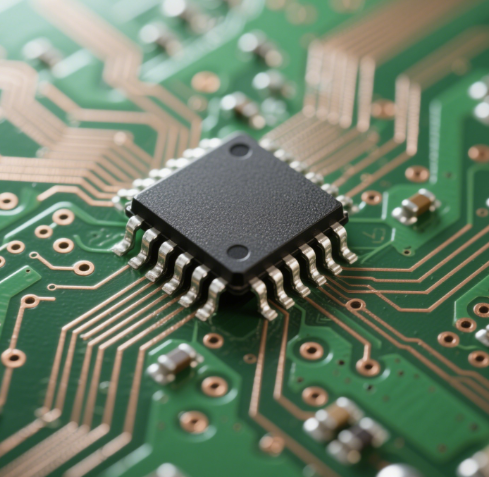
2.2 有符号距离的必要性
- 如下图,如果要测量元器件周围白色胶水到元件的高度呢?工艺要求是,胶水要比元件高,但是很有可能胶水点少了,胶高就低于元件了。这样如果还只是测量无符号距离的话,就很可能造成误判。

3. 无符号距离怎么算
3.1 创建一个无限延展的基准平面,对距离有什么影响?
Halcon代码
X:=[0,1,2,3,\0,1,2,3,\0,1,2,3,\0,1,2,3]
Y:=[0,0,0,0,\1,1,1,1,\2,2,2,2,\3,3,3,3]
Z:=[0.5,0,0,0,\0,0.1,0,0,\0,0.1,0,0,\0,0,0,0]
* 使用一组三维点创建三维点云物体模型
gen_object_model_3d_from_points (X, Y, Z, MeasurePoints)
* 创建一个基准平面
gen_plane_object_model_3d ([0,0,0,0,0,0,0], [], [], BasePlane)
* 计算三维点到基准平面的距离
distance_object_model_3d (MeasurePoints, BasePlane, [], 0, 'distance_to', 'primitive')
* 获取距离数据
get_object_model_3d_params (MeasurePoints, '&distance', distances)
图示
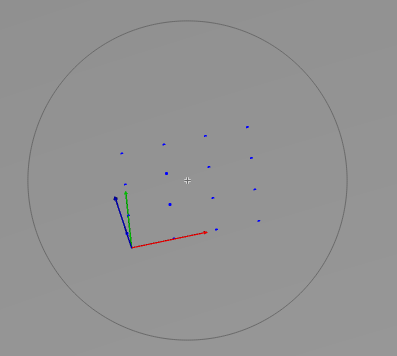
- 从图中可以看出,由于创建的平面是无限延展的,所以点云中的所有点都无法逃脱平面的掌控,这样计算距离是不会有问题的。
3.2 创建一个小小小的基准平面,对距离有什么影响?
halcon代码
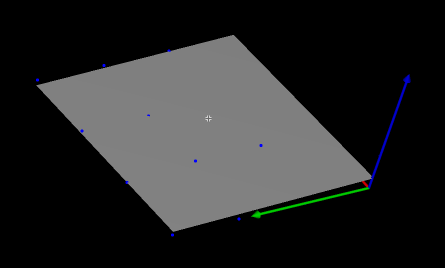
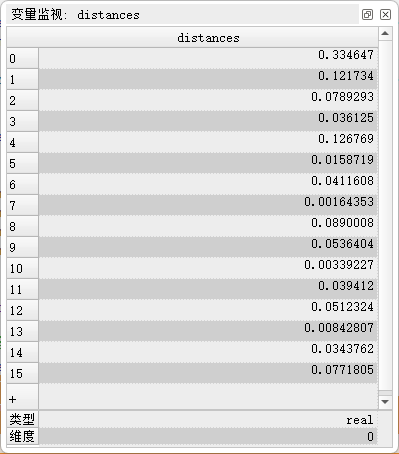
- 在3.1的代码中修改一下基准的范围,如下图,现在基准平面完全hold不住所有点。
* 创建一个基准平面
gen_plane_object_model_3d ([0,0,0,0,0,0,0], [0,0,1,1], [0,1,1,0], BasePlane)
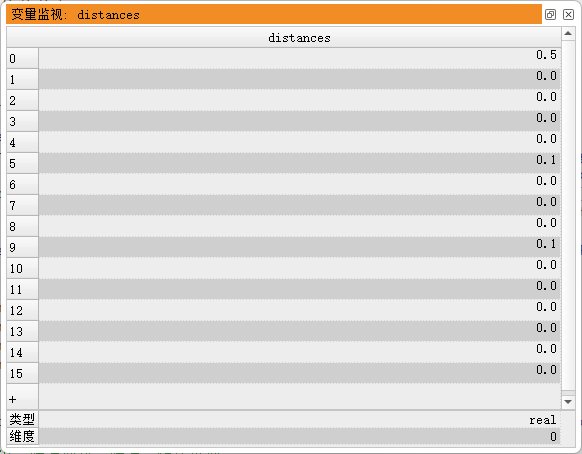
图示

- 通过观察上面的距离数据,你就会发现,这里计算点到平面距离,基准平面并不是默认为无限延展的,如果基准面不够大,那么没有在平面势力范围内的点就会找平面里离它最近的一个点。
3.3 直接使用点云拟合基准平面,可行吗?
halcon代码
- 你是说你使用点云上的所有点拟合成一个平面,这个平面作为基准平面,然后再计算点云里所有的点到基准平面的距离? 这种方法当然是可行的。
* 创建一个基准平面
fit_primitives_object_model_3d (ObjectModel3D, ['primitive_type','fitting_algorithm'], \['plane','least_squares_tukey'], BasePlane)
gen_plane_object_model_3d ([0,0,0,0,0,0,0], [0,0,1,1], [0,1,1,0], BasePlane)
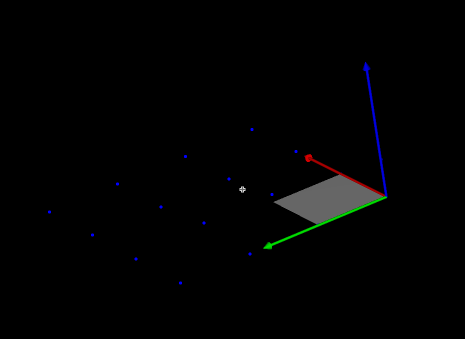
- 不用担心这个基准面不够大,经过我的验证,这个平面刚刚好,够用就行了,不是非要无限延展不可。
图示
4. 有符号距离怎么算
- 其实我写到这里已经累了,但是又不想半途而废,所以坚持写完吧。
4.1 诡异的平面法向量方向
4.1.1 下面的halcon代码展示了如何获得平面单位法向量,或者说如何获得平面方程一般式 A、B、C、D
* 计算带符号的三维点到平面的距离
X:=[1,2,3,4,\1,2,3,4,\1,2,3,4,\1,2,3,4]
Y:=[1,1,1,1,\2,2,2,2,\3,3,3,3,\4,4,4,4]Z:=[0,0,0,0,\0,1,1,0,\0,1,1,0,\0,0,0,0]dev_get_window (WindowHandle)gen_object_model_3d_from_points (X, Y, Z, ObjectModel3D)
fit_primitives_object_model_3d (ObjectModel3D, ['primitive_type','fitting_algorithm'], \['plane','least_squares_tukey'], ObjectModel3DOut)
visualize_object_model_3d (WindowHandle, [ObjectModel3DOut,ObjectModel3D], \[], [], ['disp_pose','color_0','color_1'], ['true','gray','blue'], [], [], [], PoseOut)get_object_model_3d_params (ObjectModel3DOut, 'primitive_parameter', GenParamValue) //GenParamValue里面有四个参数,就是平面方程的A、B、C、D
4.1.2 Halcon如何解释 A、B、C、D
- 但是halcon对于A、B、C、D的解释并非我们想的那样自然,以下是get_object_model_3d_params 的参数解释,以及豆包的翻译。
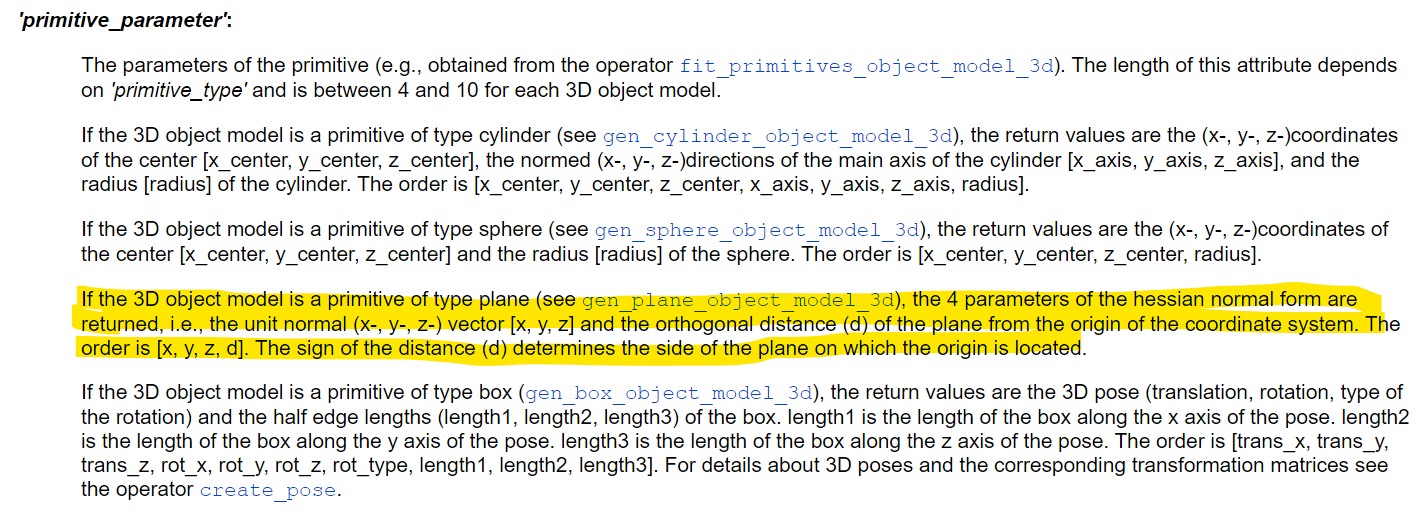
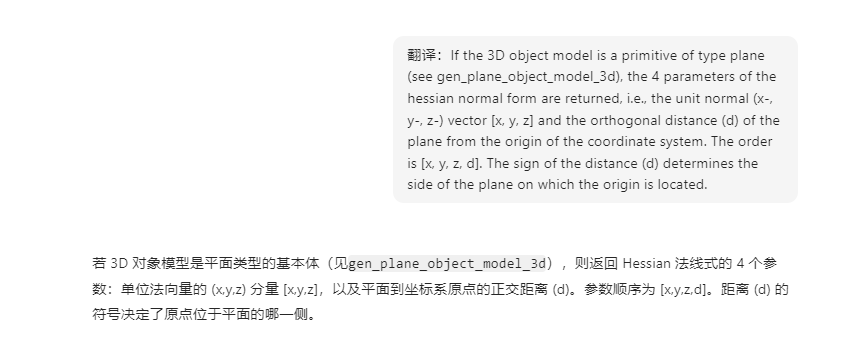
4.1.3 我们如何理解A、B、C、D
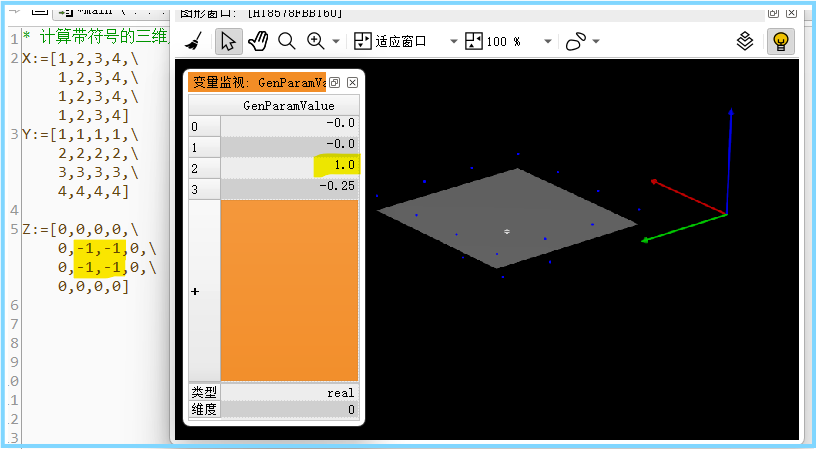
- 先不说别的,我给出两组数据,观察一下结果:
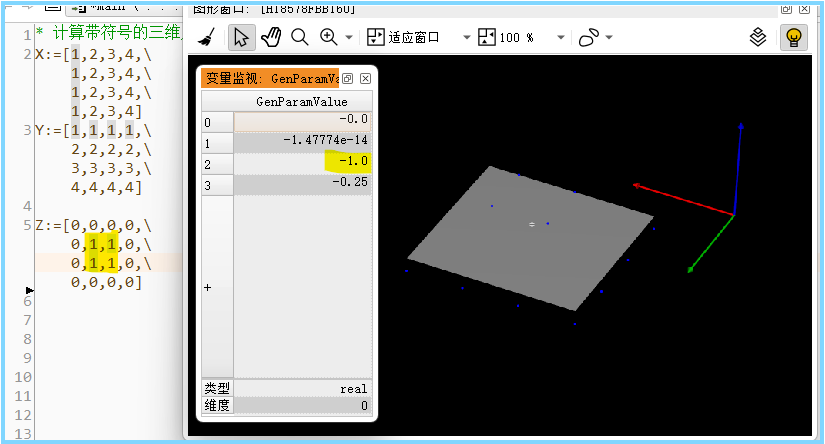
- 我们观察到,当平面高于 Z=0 平面时,单位法向量 (A,B,C) 指向与Z轴的正方向相反;
- 而当平面低于 Z=0 平面时,单位法向量 (A,B,C) 指向与Z轴的正方向相同;
- 为了观察的更仔细,我再给两组数据,
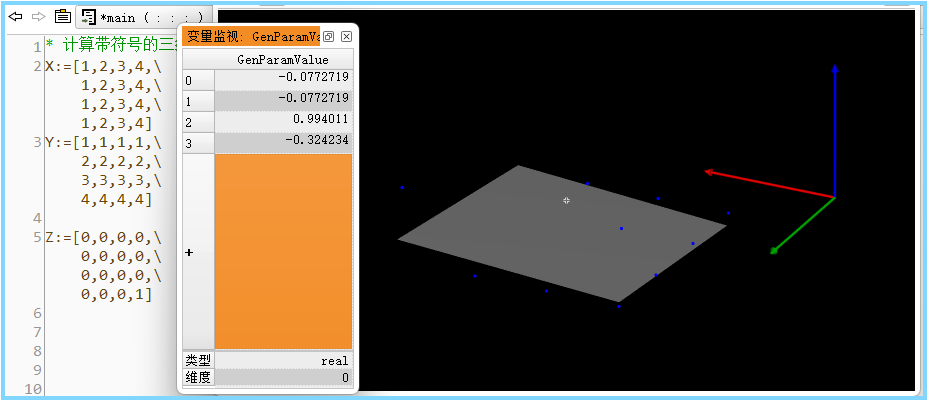
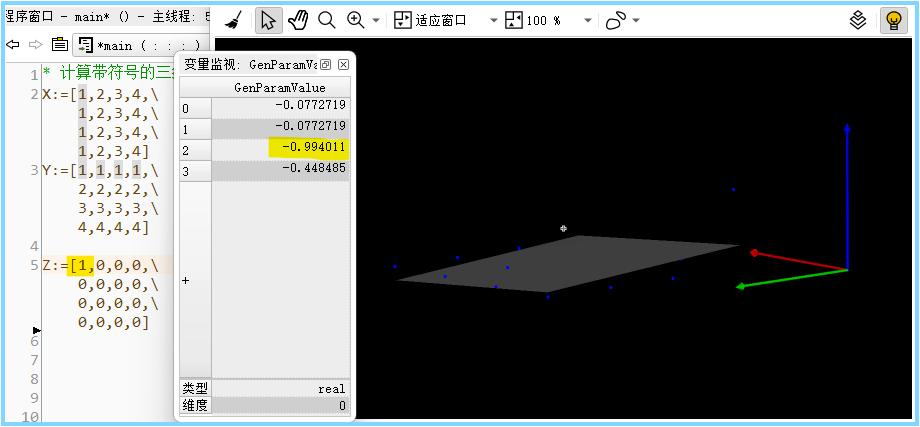
- 从这两组数据可以看出,平面单位法向量的方向和平面与Z轴的交点有关,如果交点在原点上方,那么法向量的方向与Z轴正方向所成的夹角是钝角,或者简单说成法向量指向下方。反之,法向量指向上方。
- 我为什么这么在意法向量指向那一侧呢?因为这能帮助我们判断一个三维点在平面的哪一侧。如果我们想一个办法,可以让平面的法向量永远向上指(法向量与Z轴夹角为锐角),那这个问题就可以画上句号了。
4.1.4 如何修改法向量
- 如果 (A,B,C) 是平面 Plane 的单位法向量,那么 (-A,-B,-C) 也是它的法向量,只不过和前面的那个法向量方向相反。
- 从4.1.2中我们了解到,可以通过 D 的符号来判断原点位于平面的哪一侧,确定了这件事情后,我们也就知道平面法向量指向哪一侧了。
- 然后,我们通过一些处理,让法向量永远指向我们想要的方向。
- 不想再解释了,现在真的累了,直接给代码吧。
4.2 封装计算带符号距离的方法
GetPointToPlaneDistance (PlaneA, PlaneB, PlaneC, PlaneD, X, Y, Z, Distance)
if (PlaneC<0)PlaneA:=-PlaneAPlaneB:=-PlaneBPlaneC:=-PlaneC
elsePlaneD:=-PlaneD
endifNumPoints := |X|
Distance := []for I := 0 to NumPoints-1 by 1Numerator := PlaneA * X[I] + PlaneB * Y[I] + PlaneC * Z[I] + PlaneDSignedDistance := NumeratorDistance := [Distance, SignedDistance]
endfor
return ()
4.3 全部测试代码
* 计算带符号的三维点到平面的距离
X:=[1,2,3,4,\1,2,3,4,\1,2,3,4,\1,2,3,4]
Y:=[1,1,1,1,\2,2,2,2,\3,3,3,3,\4,4,4,4]Z:=[1,0,0,0,\0,0,0,0,\0,0,0,0,\0,0,0,0]dev_get_window (WindowHandle)gen_object_model_3d_from_points (X, Y, Z, ObjectModel3D)
fit_primitives_object_model_3d (ObjectModel3D, ['primitive_type','fitting_algorithm'], \['plane','least_squares_tukey'], ObjectModel3DOut)get_object_model_3d_params (ObjectModel3DOut, 'primitive_parameter', GenParamValue)PlaneA:=GenParamValue[0]
PlaneB:=GenParamValue[1]
PlaneC:=GenParamValue[2]
PlaneD:=GenParamValue[3]GetPointToPlaneDistance (PlaneA, PlaneB, PlaneC, PlaneD, X, Y, Z, Distance)* visualize_object_model_3d (WindowHandle, [ObjectModel3DOut,ObjectModel3D], \[], [], ['disp_pose','color_0','color_1'], ['true','gray','blue'], [], [], [], PoseOut)