TCP 三次握手,第二次握手报文丢失会发生什么?
服务端收到客户端的 SYN 报文后,会回给客户端 SYN+ACK 报文,之后处于 SYN_RCVD 状态
第二次握手的 SYN+ACK 报文其实有两个目的:
- 第二次握手的 ACK,是对第一次握手的确认报文
- 第二次握手的 SYN,是服务端请求建立 TCP 连接的报文
如果第二次握手报文丢失了:
- 客户端
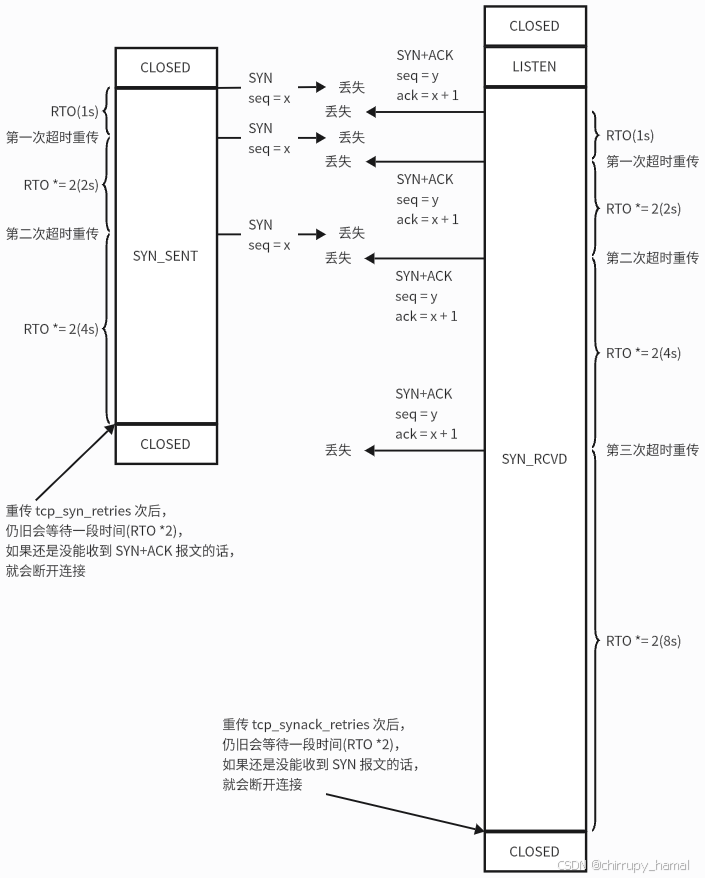
因为第二次握手包含对第一次握手的确认报文,如果客户端迟迟没有收到第二次握手报文,客户端就会觉得自己的 SYN 报文可能丢失了,于是就会触发「超时重传」机制,重新发送 SYN 报文 - 服务端
因为第二次握手包含服务端请求建立 TCP 连接的 SYN 报文,当客户端收到后,需要回给服务端 ACK 报文,如果第二次握手报文丢失了,服务端也就收不到第三次握手报文,于是就会触发「超时重传」机制,重新发送 SYN+ACK 报文
下图以 Linux(6.14.7) TCP 第一次握手报文丢失为例,其中 tcp_syn_retries 参数值为 2, tcp_synack_retries 参数值为 3