六足连杆爬行机器人的simulink建模与仿真
目录
1.课题概述
2.系统仿真结果
3.核心程序
4.系统原理简介
5.完整工程文件
1.课题概述
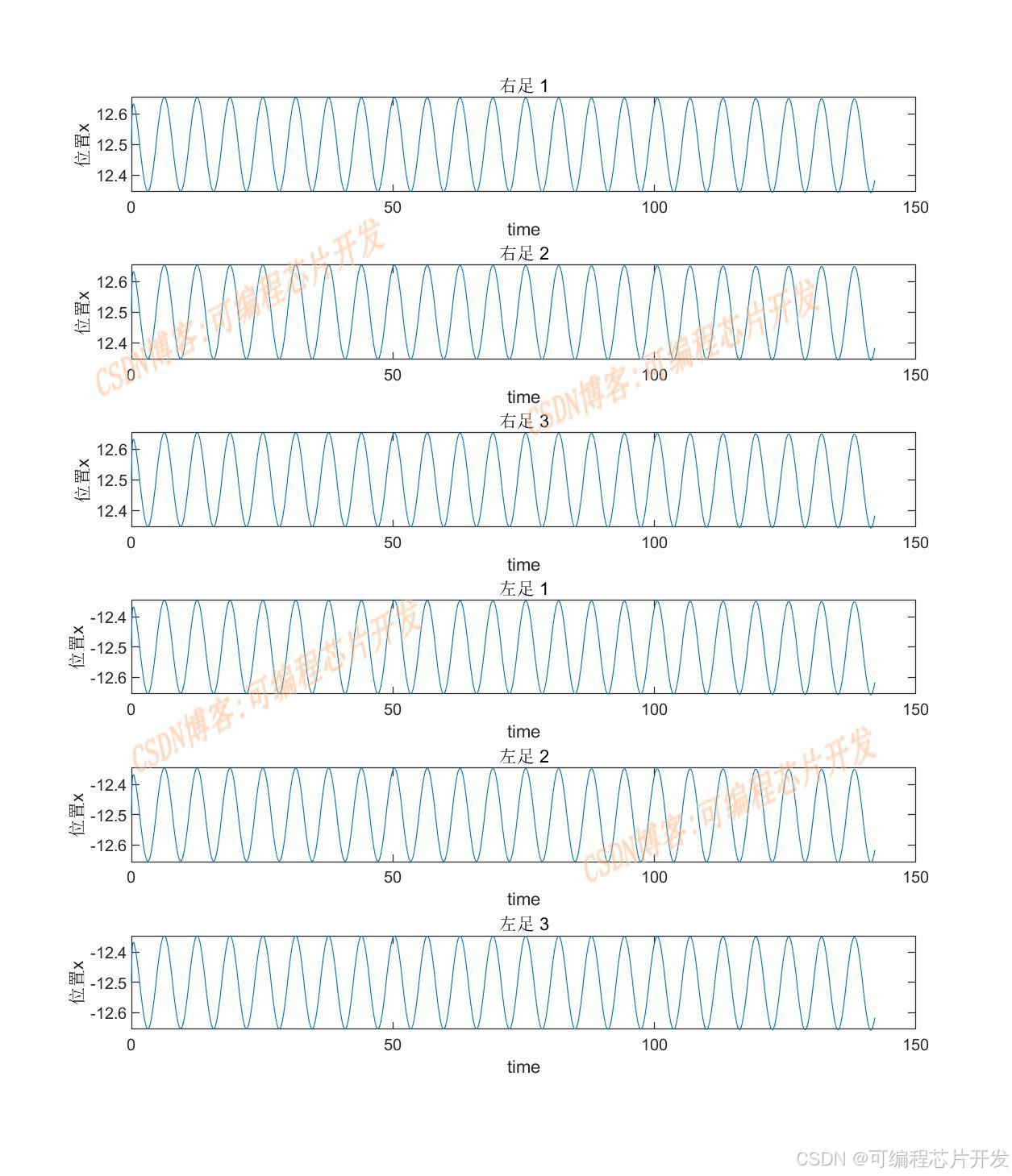
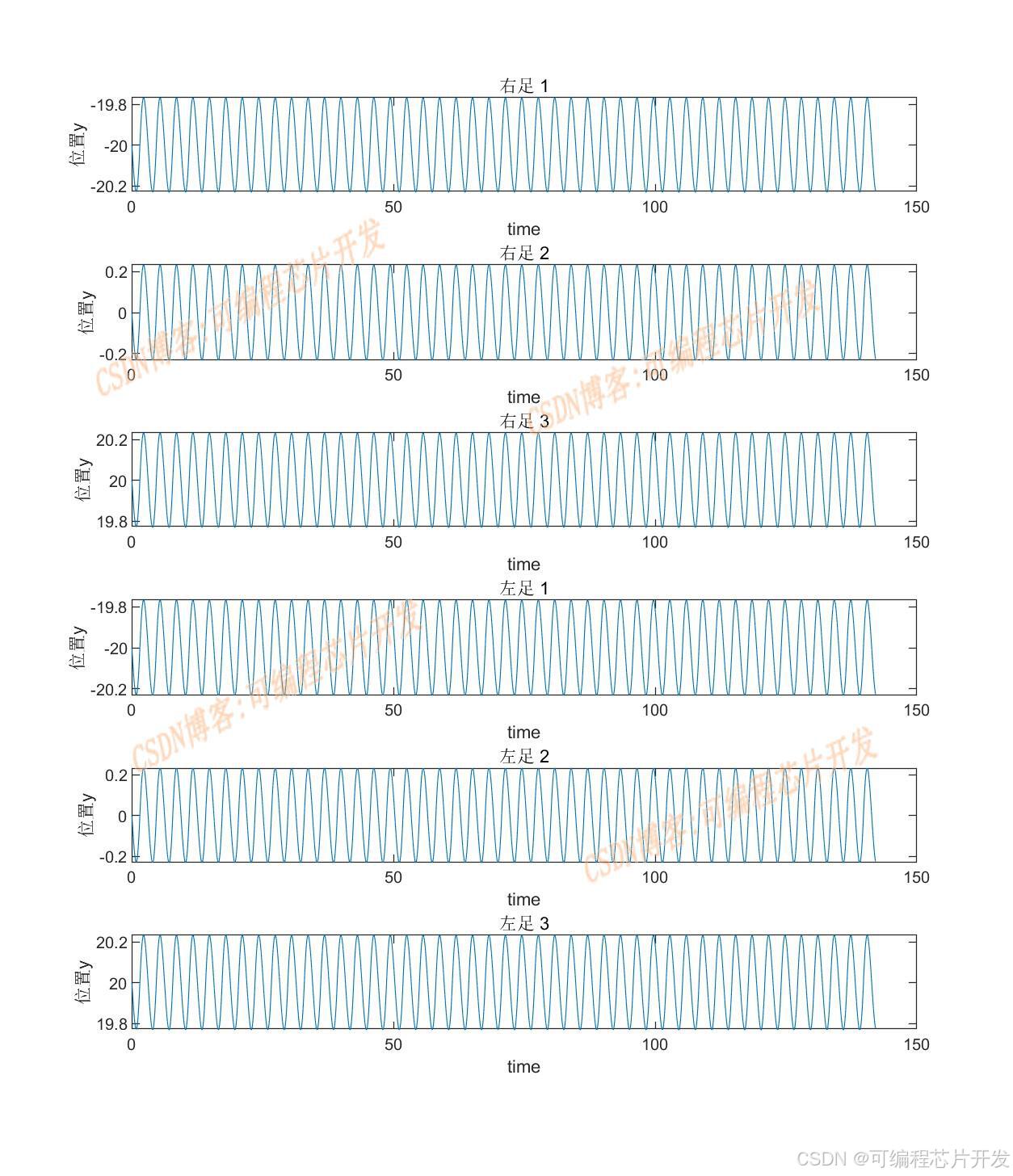
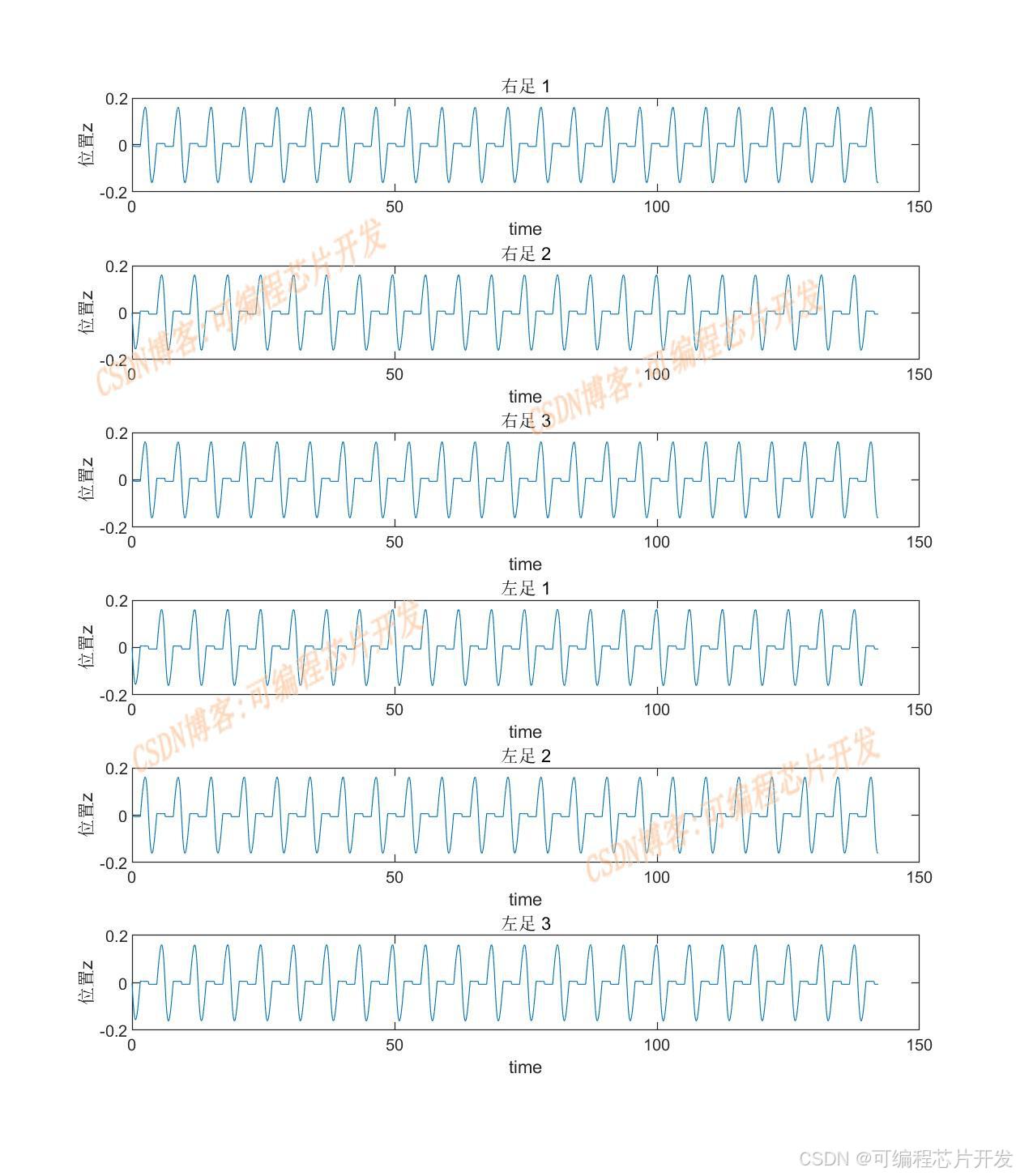
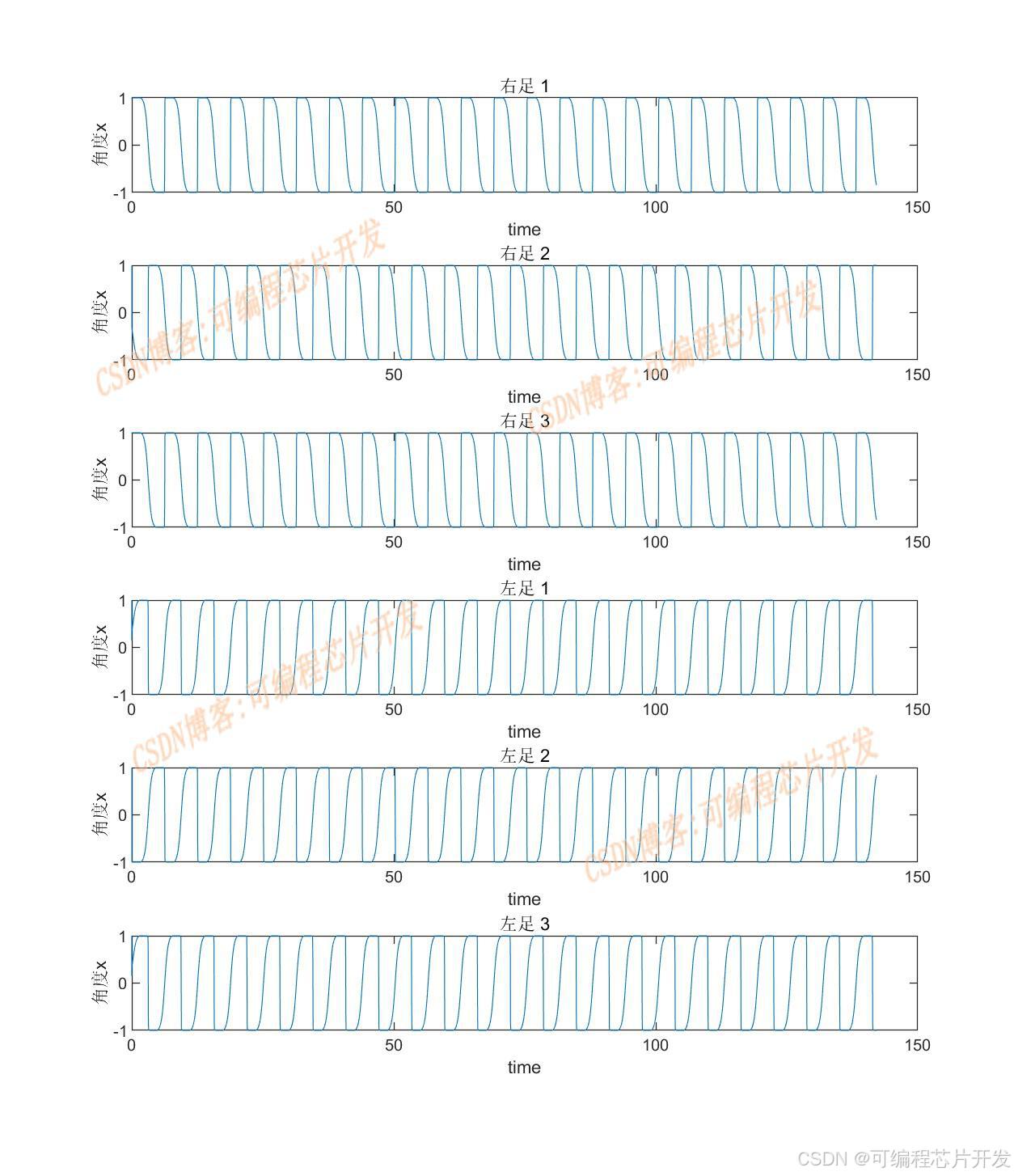
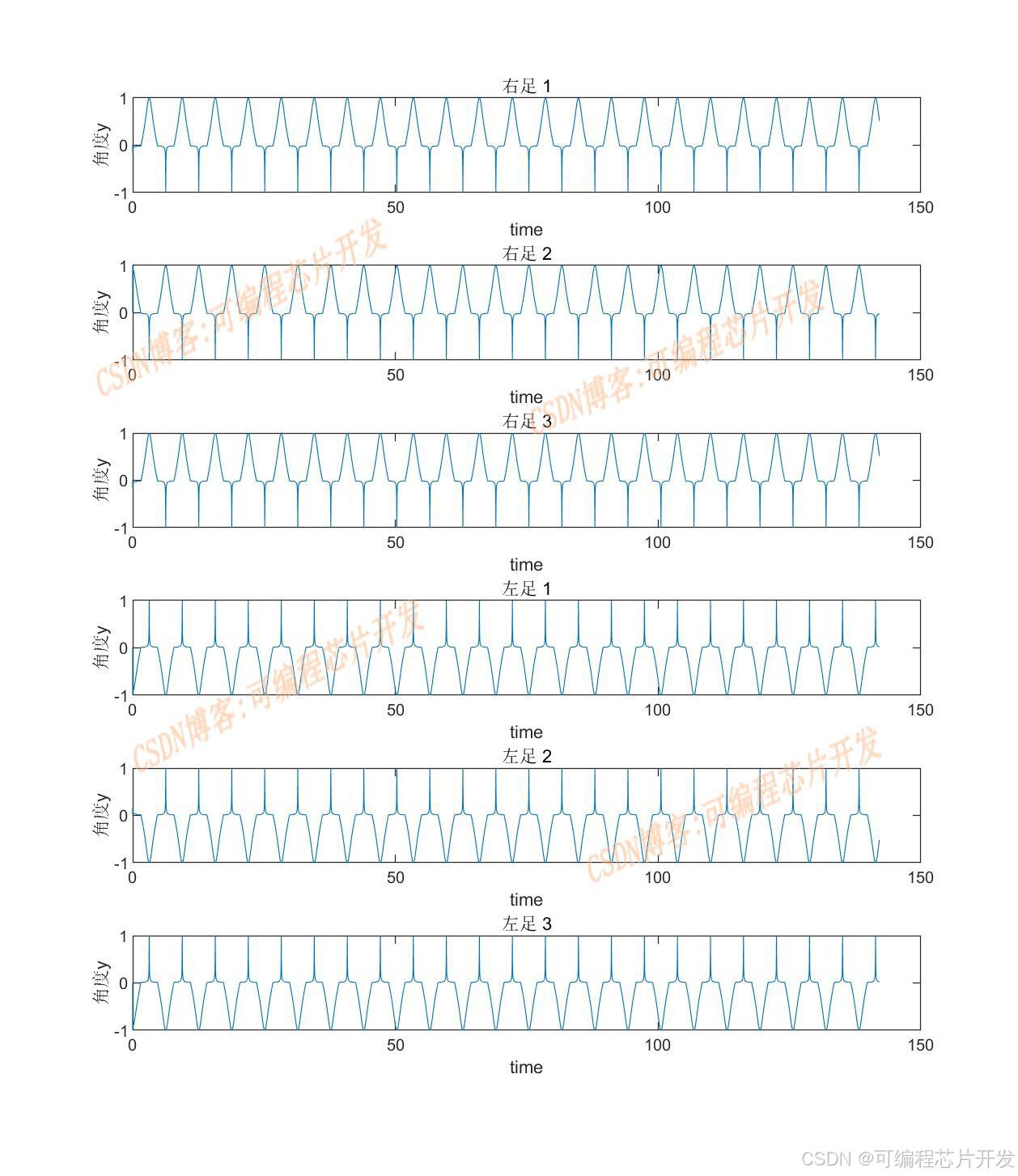
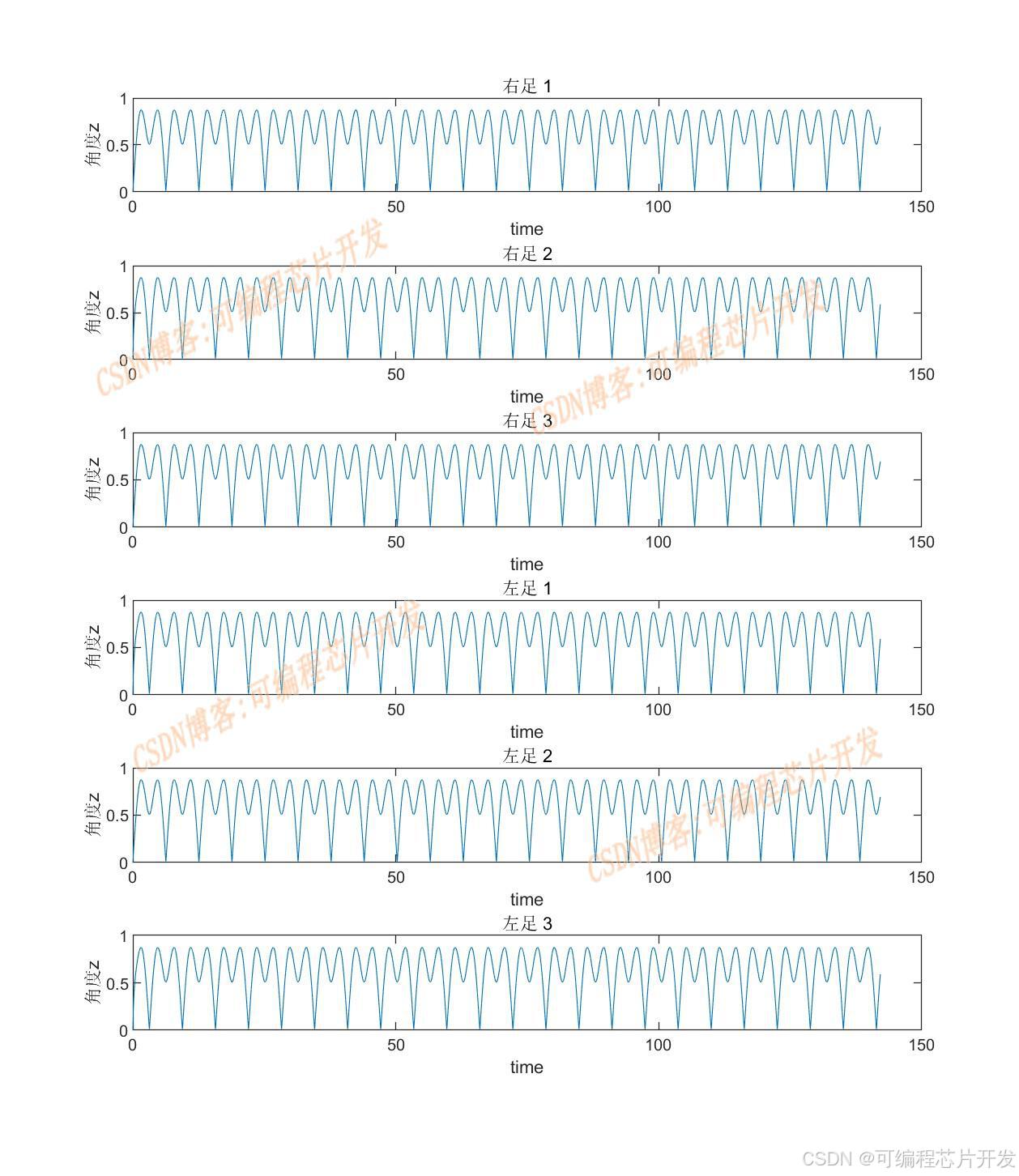
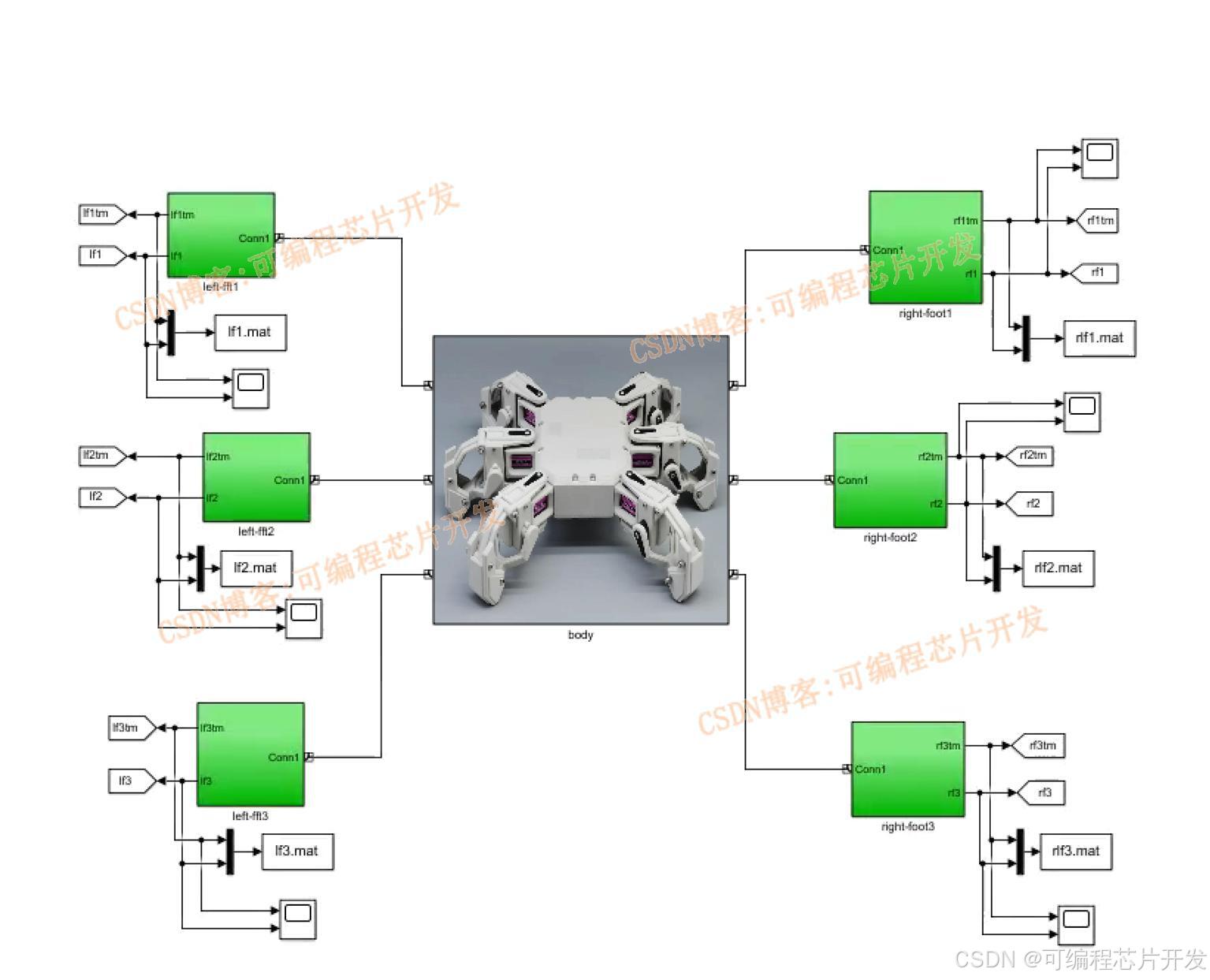
六足连杆爬行机器人的simulink建模与仿真。通过simulink,对六足机器人的六足以及机身进行simulink建模,模拟其行走,仿真输出机器人行走时六足的坐标变化曲线以及关节角度变化曲线。
2.系统仿真结果
3.核心程序
matlab2024b
44_002m
4.系统原理简介
多足步行机器人的运动轨迹是一系列离散的足印运动时只需要离散的点接触地面对环境的破坏程度也较小可以在可能到达的地面上选择最优的支撑点对崎岖地形的适应性强。正因为如此多足步行机器人对环境的破坏程度也较小。轮式和履带式机器人的则是一条条连续的辙迹。崎岖地形中往往含有岩石、泥土、沙子甚至峭壁和陡坡等障碍物可以稳定支撑机器人的连续路径十分有限,这意味着轮式和履带式机器人在这种地形中已经不适用。多足步行机器人的腿部具有多个自由度使运动的灵活性大大增强。它可以通过调节腿的长度保持身体水平也可以通过调节腿的伸展程度调整重心的位置因此不易翻倒稳定性更高。当然多足步行机器人也存在一些不足之处。比如为使腿部协调稳定运动从机械结构设计到控制系统算法都比较复杂相比自然界的节肢动物仿生多足步行机器人的机动性还有很大差距。
六足机器人的其核心优势包括:
高稳定性:六足可形成至少三足支撑的稳定三角形(静步态)或动态交替支撑(动步态);
地形适应性:多足协同可跨越障碍物、适应非结构化环境;
冗余性:单足故障时可通过步态重构维持运动。
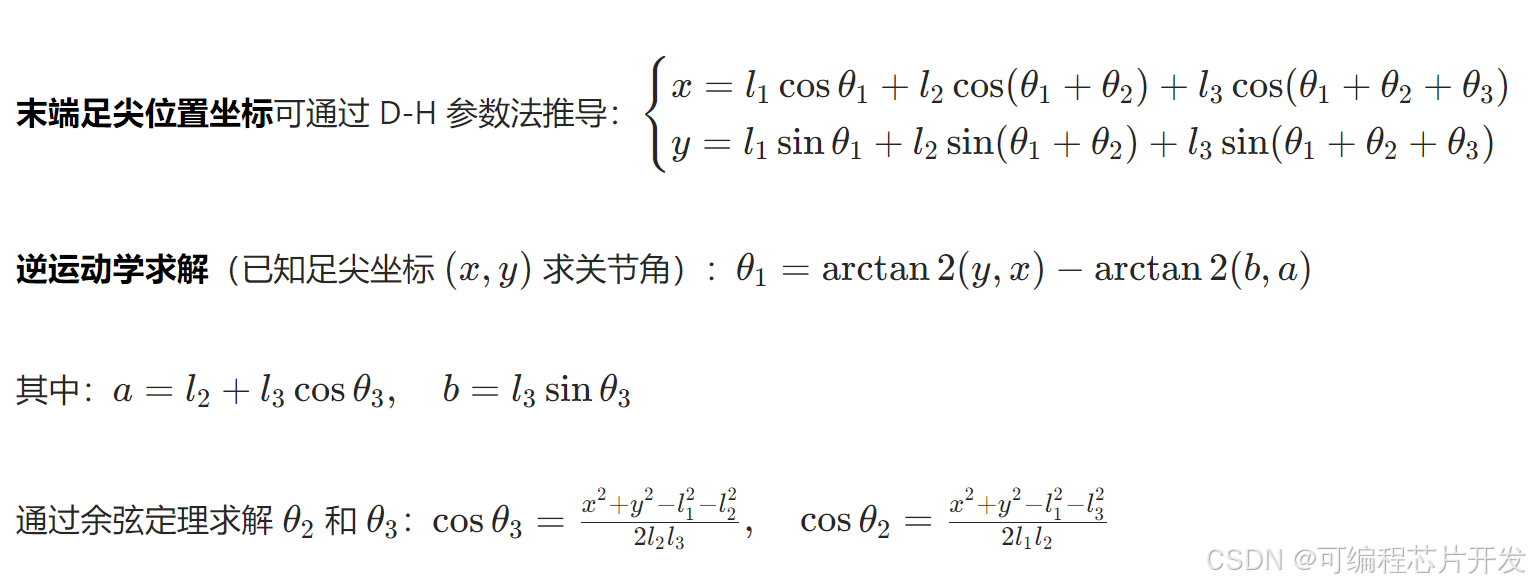
设连杆长度为l1(基节)、l2(股节)、l3(胫节),关节角为θ1(髋关节俯仰角)、θ2(膝关节俯仰角)、θ3(踝关节俯仰角)。
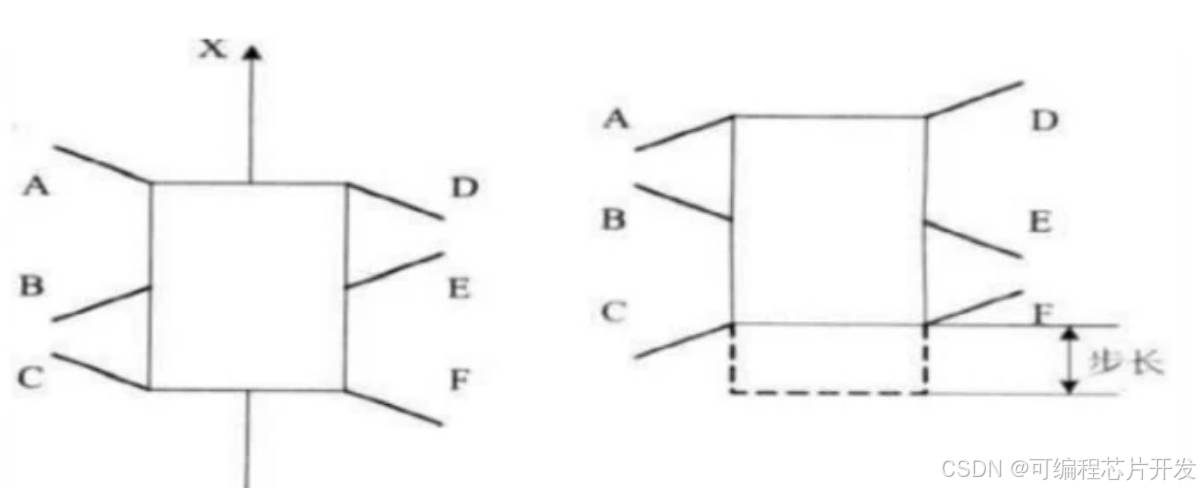
步态是指机器人步行时各腿的抬起 / 放下顺序与时间配合,六足步行机器人的步态是多样的,其中三角步态是六足步行机器人实现步行的典型步态。 “六足纲” 昆虫步行时,一般不是六足同时直线前进,而是将三对足分成两组,以三角形支架结构交替前行。目前,大部分六足机器人采用了仿昆虫的结构,6条腿分布在身体的两侧,身体左侧的前、后足及右侧的中足为一组,右侧的前、后足和左侧的中足为另一组,分别组成两个三角形支架,依靠大腿前后划动实现支撑和摆动过程,这就是典型的三角步态行走法,如图1所示。图1中机器人的髋关节在水平和垂直方向上运动。此时,B、D、F 脚为摆动脚,A、C、E脚原地不动,只是支撑身体向前。由于身体重心低,不用协调Z向运动,容易稳定,所以这种行走方案能得到广泛运用。
常见步态包括:
1.三角步态(Tripod Gait)
支撑相:三足(如左前、右中、左后)着地,形成稳定三角形;
摆动相:另三足抬起向前摆动,周期为 T;
步速公式:v=2s/T, 其中s为单腿步长。
2.波浪步态(Wave Gait)
顺序抬足:腿部按躯体纵向顺序依次摆动(如左前→左中→左后→右前→右中→右后);
相位差:相邻腿摆动相位差为 Δϕ=2π/6=π/3;
3.稳定性判据:任何时刻至少 4 足着地,适用于低速高精度场景。
动态步态(Dynamic Gait)
质心控制:通过调整躯体姿态(俯仰角 α、侧倾角 β)改变重心位置,避免翻倒;
5.完整工程文件
v