2025年JIII SCI1区TOP,多策略霜冰优化算法IRIME+无人机路径规划,深度解析+性能实测
目录
- 1.摘要
- 2.霜冰优化算法RIME原理
- 3.改进策略
- 4.结果展示
- 5.参考文献
- 6.代码获取
- 7.读者交流
1.摘要
优化工业信息集成是发挥工业4.0潜力的基础,推动基于数据的决策,以提高运营效率、降低成本,并增强现代工业环境中的竞争力。在这一过程中,无人机(UAV)路径规划扮演着至关重要的角色,它支持高效、可靠的数据收集与传输,从而为智能决策提供基础。本文提出了增强霜冰优化算法(IRIME),IRIME通过霜晶扩散机制提高初始种群的多样性,通过高空凝结策略提升全局搜索能力,通过格子编织策略避免过早收敛。
2.霜冰优化算法RIME原理
【智能算法】霜冰优化算法(RIME)原理及实现
3.改进策略
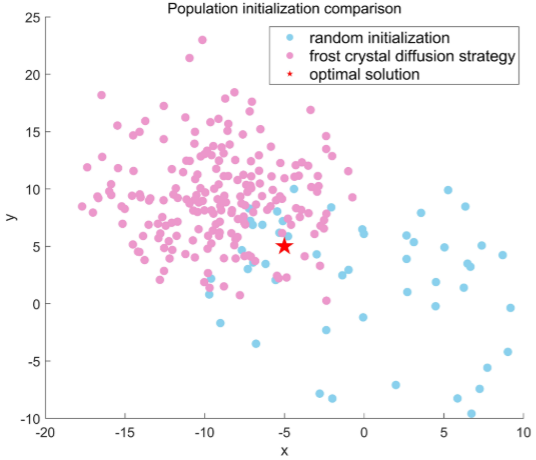
霜晶扩散策略
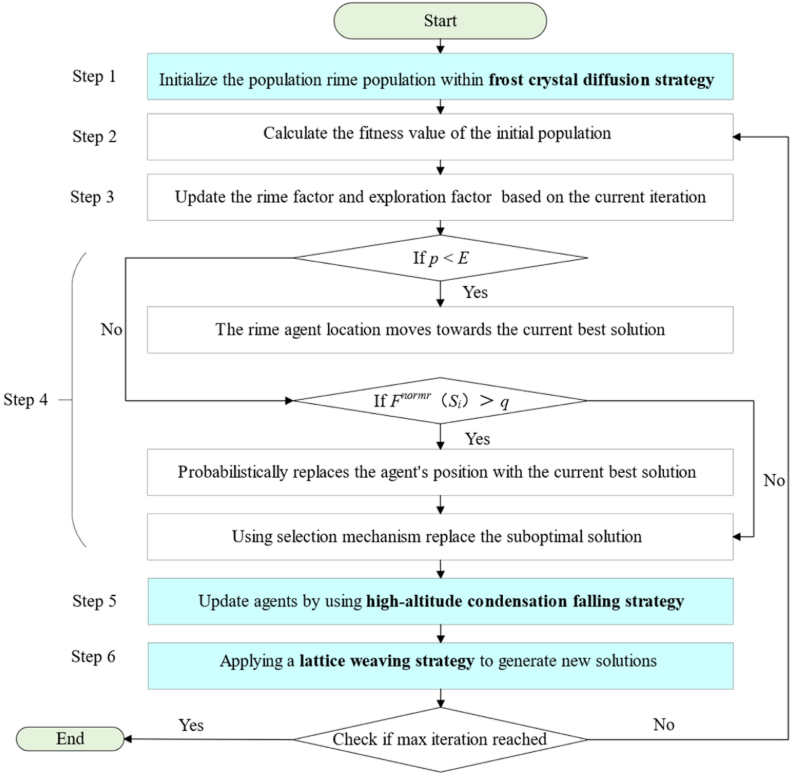
种群初始化是进化算法中的关键步骤,初始种群的多样性直接影响算法的性能。传统的随机初始化方法由于其高度随机性,可能导致初始个体分布不均,从而影响全局搜索能力。为了优化这一过程,本文提出了一种基于霜晶扩散策略的种群初始化方法,借鉴了低温冻结雾霾中霜晶扩散和形成的自然过程。霜晶扩散策略的核心在于有效地探索解空间,并快速识别可能包含最优解的区域。霜晶扩散策略策略具有两大特点:扩散特性使得初始个体能够广泛分布在解空间内,通过高斯函数引导种群朝更优区域集中;霜晶特性利用高斯函数生成围绕潜在最优解的变化集。通过这两者的协同作用,霜晶扩散策略不仅能够提高算法的搜索效率,还能加速收敛过程,使初始种群在覆盖更广泛解空间的同时,集中更多资源在接近最优解的区域。
R ( t + 1 ) = G a u s s i a n ( R o p t t , μ 1 ) + ( a 1 ⋅ R o p t t − a 2 ⋅ R i t ) R(t+1)=\mathrm{Gaussian}\left(R_{opt}^t,\mu_1\right)+\left(a_1\cdot R_{opt}^t-a_2\cdot R_i^t\right) R(t+1)=Gaussian(Roptt,μ1)+(a1⋅Roptt−a2⋅Rit)
其中,
μ 1 = δ ⊙ ( u b − l b ) \mu_1=\delta\odot(ub-lb) μ1=δ⊙(ub−lb)
高空凝结策略
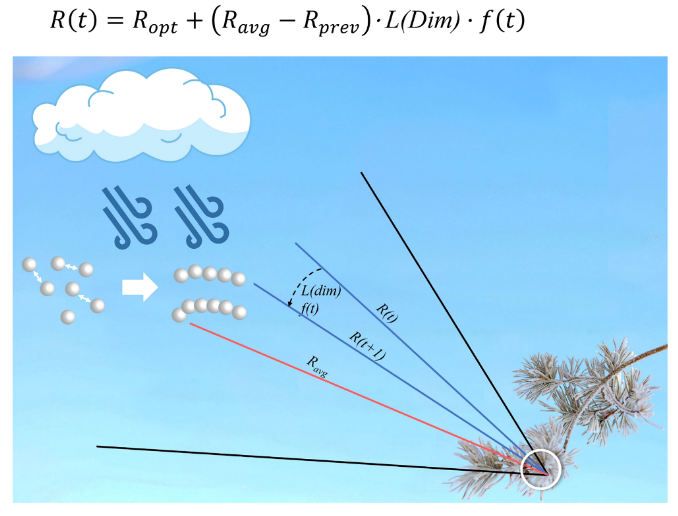
本文在算法搜索阶段设计了一种高空凝结下落策略。在低温和低风速条件下,雾中的水蒸气未凝结的部分在0°C以下随风漂浮。受气压和气流等因素影响,部分粒子相互碰撞并合并,形成流线型细小水滴,减少空气阻力,并扩展下落范围。类似于水蒸气在空中漂浮的过程,算法能够在搜索空间内进行更广泛的探索。当风速增加时,水滴随风迅速流动,凝结并在物体表面(如树枝)生长,继续冻结并积累,从而使得算法在可行域内进行更密集的搜索。这一机制显著扩展了原始算法中搜索代理的运动范围,使其能够覆盖更广泛的全局搜索空间,极大地提升了探索能力。通过这一高空凝结下落策略,算法能够更有效地进行全局搜索,优化解的搜索过程:
R ( t ) = R o p t + ( R a v g − R p r e v ) ⋅ L ( D i m ) ⋅ f ( t ) R(t)=R_{opt}+ \begin{pmatrix} R_{avg}-R_{prev} \end{pmatrix}\cdot L(Dim)\cdot f(t) R(t)=Ropt+(Ravg−Rprev)⋅L(Dim)⋅f(t)
其中, f ( t ) f(t) f(t)为过渡因子函数:
f ( t ) = c + [ c o s ζ ⋅ c o s ( t T ) − s i n ζ ⋅ i n ( t T ) ] ⋅ e − t f(t)=c+\left[cos\zeta\cdot cos\left(\frac{t}{T}\right)-sin\zeta\cdot in\left(\frac{t}{T}\right)\right]\cdot e^{-t} f(t)=c+[cosζ⋅cos(Tt)−sinζ⋅in(Tt)]⋅e−t
格子编织策略
在RIME算法的后期阶段,凝结的霜晶个体通常会聚集在最佳解附近,这导致种群多样性下降,可能会使算法过早收敛并陷入局部最优解。为了解决或避免这种情况,本文提出了格子编织策略,旨在通过模仿霜晶在自然形成过程中的交织与融合,增强算法跳出局部最优解的能力。格子编织策略在算法启动时随机配对种群中的霜晶个体,将每一对霜晶视为格子结构中的两个节点。算法通过模拟这些节点之间的相互连接和信息交换过程:
R M 1 j i h c = α 1 ⋅ R M i 1 j + ( 1 − α 1 ) ⋅ R M i 2 j + ω 1 ⋅ ( R M i 1 j − R M i 2 j ) RM_{1ji}^{hc}=\alpha_{1}\cdot RM_{i1j}+(1-\alpha_{1})\cdot RM_{i2j}+\omega_{1}\cdot(RM_{i1j}-RM_{i2j}) RM1jihc=α1⋅RMi1j+(1−α1)⋅RMi2j+ω1⋅(RMi1j−RMi2j)
R M i 2 j h c = α 2 ⋅ R M i 2 j + ( 1 − α 2 ) ⋅ R M i 1 j + ω 2 ⋅ ( R M i 2 j − R M i 1 j ) RM_{i2j}^{hc}=\alpha_2\cdot RM_{i2j}+(1-\alpha_2)\cdot RM_{i1j}+\omega_2\cdot(RM_{i2j}-RM_{i1j}) RMi2jhc=α2⋅RMi2j+(1−α2)⋅RMi1j+ω2⋅(RMi2j−RMi1j)
PS:本质是水平交叉变异,包装了一下~
流程图
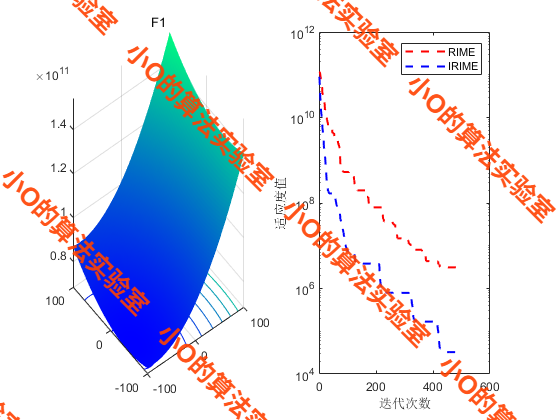
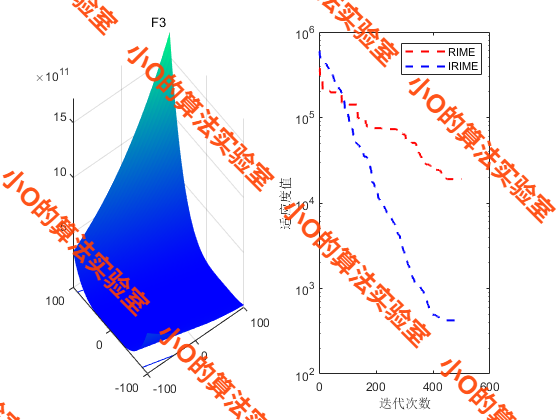
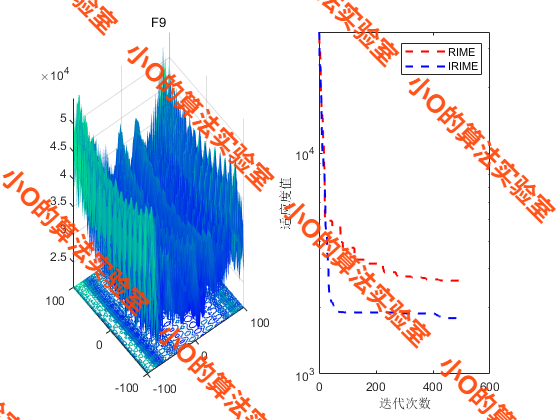
4.结果展示
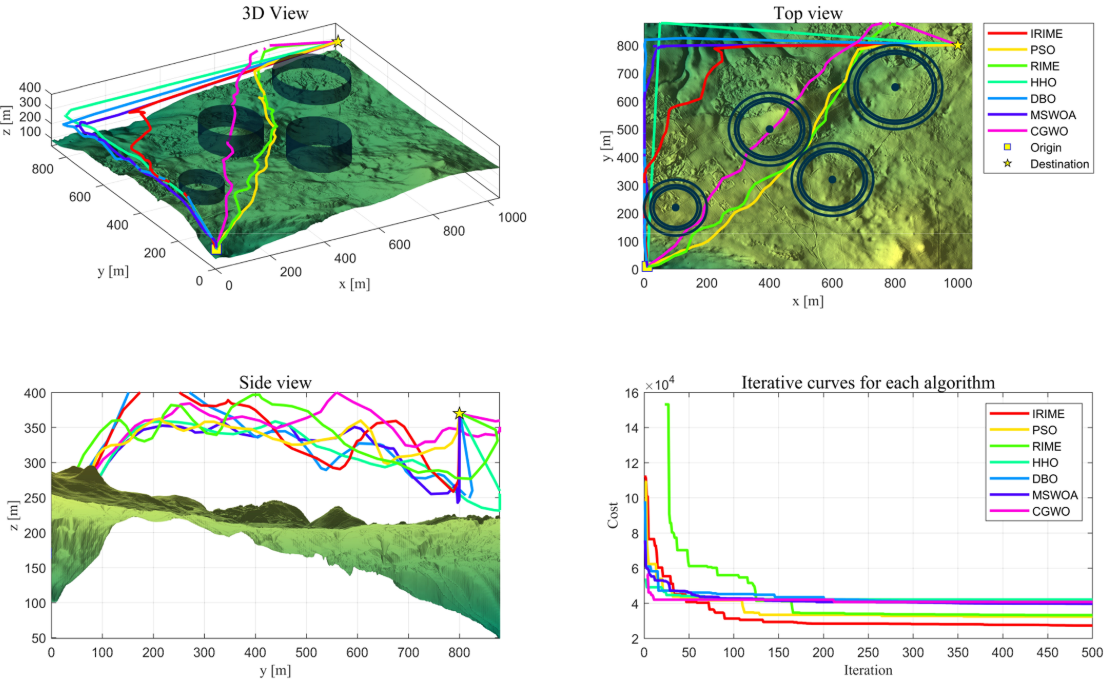
PS:应用可定制,有需要做应用可以联系我~
5.参考文献
[1] Gu T, Zhang Y, Wang L, et al. A comprehensive analysis of multi-strategic RIME algorithm for UAV path planning in varied terrains[J]. Journal of Industrial Information Integration, 2025, 43: 100742.