EtherCAT通讯框架
EtherCAT(以太网控制自动化技术)是一种高性能的工业以太网通信协议,其硬件通讯框架基于主从式架构,具有高效的数据处理、低延迟和高精度同步等特点。
以下是其硬件通讯框架的核心组成部分和工作原理:
一、硬件框架核心组件
1. 主站(Master)
- 功能:作为整个 EtherCAT 网络的控制中心,负责发起数据通信、配置从站、监控网络状态,并协调各从站的实时数据交互。
- 硬件实现:
- 主站控制器:通常为工业控制器(如 PLC、PC-based 控制器),集成 EtherCAT 主站协议栈(如倍福 TwinCAT、NI SoftMotion、CoDeSys 等)。
- 物理接口:通过标准以太网接口(RJ45 或工业级连接器)连接到 EtherCAT 网络,支持全双工通信。
- 处理能力:需具备实时操作系统(RTOS)和高性能 CPU/FPGA,以处理实时数据调度和协议解析。
2. 从站(Slave)
- 功能:作为现场设备(如传感器、驱动器、I/O 模块等)的通信接口,接收主站指令并反馈数据,支持数据的高效转发。
- 硬件实现:
- 从站控制器(ESC,EtherCAT Slave Controller):
- 核心组件,负责处理 EtherCAT 数据链路层协议,实现数据的接收、解析、本地映射和转发。
- 主流 ESC 芯片包括:
- 倍福(Beckhoff):ET1100(经典款)、ET1200(集成 MCU)、ET1300(低成本型)。
- TI(德州仪器):DP83848(支持 IEEE 1588 精密时钟同步)。
- 微芯(Microchip):AT91SAM9G45(集成 ESC)。
- 其他:如 Lattice 半导体的 ECP5 FPGA 可通过 IP 核实现 ESC 功能。
- 微控制器(MCU/MPU):
- 处理应用层逻辑(如传感器数据采集、电机控制算法),通过 SPI/UART 等接口与 ESC 通信。
- 常见选择:ARM Cortex-M 系列(如 STM32)、RISC-V 处理器或 FPGA(如 Xilinx/Intel FPGA)。
- 物理接口:
- 支持 EtherCAT 总线拓扑,通过端子模块或RJ45 接口连接前级和后级从站,形成链式结构。
- 部分 ESC 集成物理层(PHY)芯片,支持 100BASE-TX 以太网标准。
- 从站控制器(ESC,EtherCAT Slave Controller):
3. 物理层与拓扑结构
- 传输介质:
- 标准 CAT5/CAT6 双绞线,支持工业级电缆(如屏蔽双绞线)以抗干扰。
- 传输速率:100 Mbps 全双工。
- 拓扑结构:
- 链式(主链):从站串联连接,主站发送的帧通过每个从站实时转发,延迟极低(纳秒级)。
- 树状 / 星型(通过分支控制器):通过分支控制器(Branch Controller)扩展为复杂拓扑,适用于分布式设备布局。
- 冗余拓扑:支持环网冗余(如 EtherCAT 环网协议),提高系统可靠性。
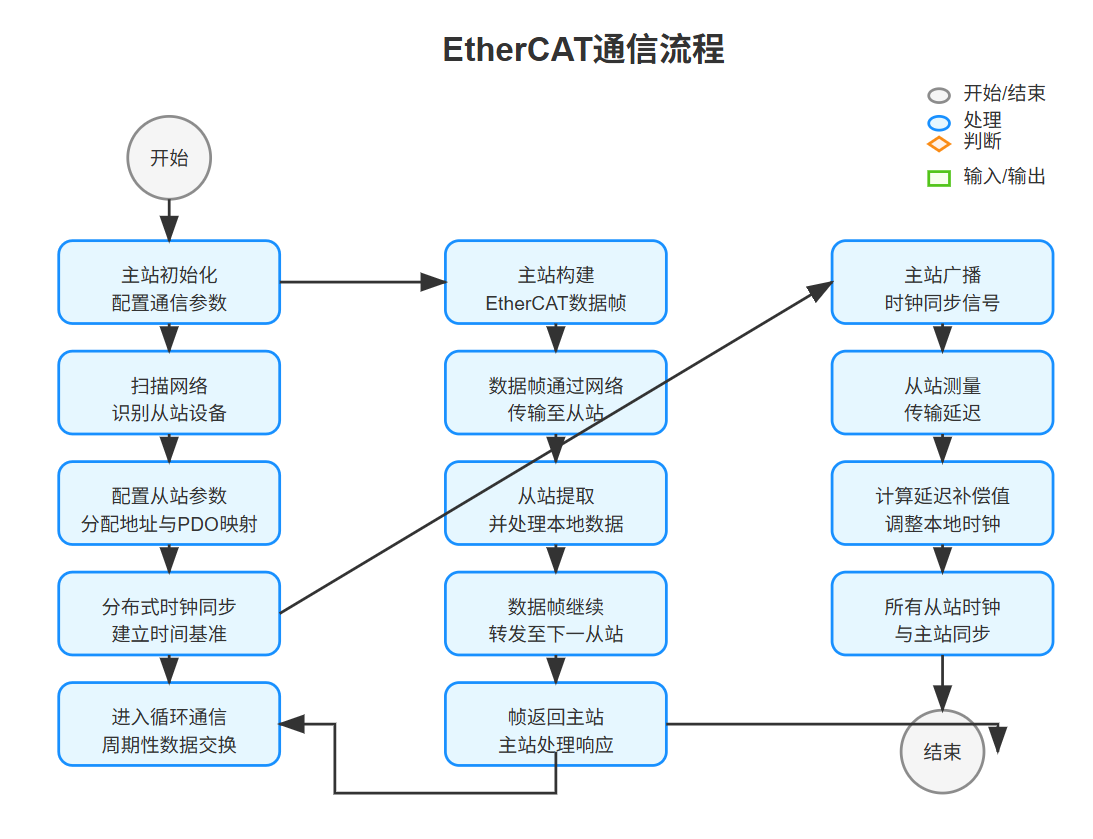
二、数据通信机制
1. 数据帧结构
- EtherCAT 帧:基于标准以太网帧,通过特定 EtherType(0x88A4)标识。
- 高效数据处理:
- 主站发送一帧数据,遍历所有从站时,各从站实时提取 / 插入本地数据(无需完整接收帧),最后由末端从站返回给主站(单播模式)。
- 支持广播帧(用于同步或配置)和多播帧(用于批量数据传输)。
2. 实时数据交互
- 过程数据(PD,Process Data):
- 周期性传输的实时数据(如传感器值、电机状态),通过 “邮箱协议(Mailbox)或对象字典(Object Dictionary)”定义数据格式。
- 非周期性数据:
- 用于配置、诊断或参数调整(如从站固件升级),通过邮箱协议或标准化协议(如 CoE、SoE)传输。
三、同步机制
EtherCAT 通过硬件支持的分布式时钟(DC,Distributed Clock) 实现高精度同步:
- 时钟主站(Clock Master):
- 通常为网络中的某个从站或主站,提供全局时钟基准。
- 从站时钟同步:
- 各从站通过 ESC 测量数据帧的传输延迟,调整本地时钟相位,实现亚微秒级同步精度。
- 支持 IEEE 1588(PTP)精密时钟同步,适用于跨网段的长距离同步。
四、典型硬件开发流程
- 主站开发:
- 选择主站协议栈(如 TwinCAT、CoDeSys),配置从站设备描述文件(.xml 或.eds)。
- 通过实时操作系统调度数据通信周期(通常为微秒至毫秒级)。
- 从站开发:
- 硬件设计:ESC 芯片(如 ET1100)与 MCU/FPGA 接口设计,实现数据映射和应用逻辑。
- 固件开发:编写从站状态机(如初始化、安全操作、运行状态),实现过程数据和邮箱协议处理。
- 工具链:使用 ETG(EtherCAT 技术协会)提供的从站配置工具(如 Slave Manager)进行参数配置和一致性测试。
- 系统集成:
- 连接主站与从站,通过 EtherCAT Configurator 工具扫描网络拓扑,分配从站地址和同步参数。
- 测试实时性能(如延迟、同步精度)和可靠性(如冗余切换、故障注入)。
五、关键厂商与硬件方案
- 主站解决方案:
- 倍福(Beckhoff):TwinCAT 主站软件 + CX 系列控制器。
- 研华(Advantech):UNO 系列控制器 + EtherCAT 主站模块。
- 西门子(Siemens):S7-1500 PLC + ET 1200 从站模块(需搭配主站软件)。
- 从站硬件模块:
- 倍福:EL 系列 I/O 模块(集成 ET1100/ET1200)。
- 万可(WAGO):750 系列 EtherCAT 从站模块。
- 自定义设计:使用 TI DP83848 + STM32 MCU 构建低成本从站。
六、总结
EtherCAT 的硬件通讯框架以主从式架构为核心,通过 ESC 芯片实现高效的数据转发和实时通信,配合分布式时钟机制满足工业自动化的高精度同步需求。其硬件设计灵活性高,可通过标准化芯片和工具链快速开发定制化从站,适用于机器人、运动控制、智能制造等实时性要求严苛的场景。