STM32SPI通信基础及CubeMX配置
STM32SPI通信基础及CubeMX配置
- 一,SPI通信基础
- 1,SPI 信号线详解
- 2,SPI 工作模式 (CPOL 和 CPHA)
- 3,通用SPI模块开发步骤 (以STM32为例)
- 1,硬件连接:
- 2,STM32CubeMX 配置思路:
- 3,驱动代码结构设计 (应用层视角):
- 二,SPI CubeMX配置
- 1,SPI: 模式选择
- 传输模式 (Transmission Mode)
- 2,SPI: 数据与帧格式
- 1,帧格式 (Frame Format)
- 2,数据大小 (Data Size)
- 3,位顺序 (First Bit)
- 3,SPI: 时钟配置
- 1,波特率预分频器 (Prescaler for Baud Rate)
- 2,时钟极性 (Clock Polarity - CPOL)
- 3,时钟相位 (Clock Phase - CPHA)
- 4,SPI 模式总结 (CPOL/CPHA)
- 4,SPI: NSS 管理
- 1,NSS 模式 (Slave Select Management)
- 2,NSS 信号极性 (NSS Polarity - 仅硬件模式)
- 3,NSS 输出脉冲模式 (NSS Pulse Mode - 仅硬件输出)
- 5,SPI: CRC 计算
- 1,CRC 计算 (CRC Calculation)
- 2,CRC 多项式 (CRC Polynomial)
- 3,CRC 长度 (CRC Length)
- 6,SPI: DMA 配置
- 1,添加 DMA 请求 (Add DMA Request)
- 2,DMA 通道配置 (DMA Request Settings)
- 7,SPI: 中断配置 (NVIC)
- 1,NVIC 设置 (NVIC Settings)
- 2,相关的 HAL 回调函数
- 8,SPI: GPIO 配置
- 1,引脚选择 (Pin Selection)
- 2,GPIO 配置 (GPIO Settings Tab)
一,SPI通信基础
SPI (Serial Peripheral Interface) 是一种高速、全双工、同步的串行通信总线,广泛用于微控制器(MCU)与外围设备(如传感器、存储器、显示驱动等)之间的短距离通信。理解其工作原理和开发流程对于嵌入式应用至关重要。
1,SPI 信号线详解
标准的SPI通信通常涉及四根信号线(在某些配置下可能更少):
1,CS (Chip Select) / SS (Slave Select): 片选信号,通常由主机控制,低电平有效。当主机需要与某个特定的从设备通信时,会将其对应的CS线拉低。在多从设备环境中,每个从设备都有独立的CS线。
2,SCK (Serial Clock): 串行时钟信号,由主机产生,用于同步数据的传输。数据的每一位都在SCK的一个特定边沿(上升沿或下降沿,取决于SPI模式)被采样。
3,MOSI (Master Out, Slave In): 主机输出、从机输入。数据由主机通过此线发送给从设备。
4,MISO (Master In, Slave Out): 主机输入、从机输出。数据由从设备通过此线发送给主机。如果一个SPI设备仅为输出型(如某些传感器)或仅为输入型,可能不会使用这两根线的其中之一。
在SPI通信中,数据是双向同时传输的:当主机通过MOSI发送一位数据给从机时,从机也通过MISO发送一位数据给主机。即使当前操作只是单向的(例如主机通过MOSI写数据给从机,不关心从机返回),MISO线上的数据依然会被传输(通常是无效数据或特定状态)。
2,SPI 工作模式 (CPOL 和 CPHA)
SPI有四种工作模式,由时钟极性(CPOL)和时钟相位(CPHA)两个参数组合定义。选择哪种模式取决于SPI从设备的要求,主机必须配置成与从设备兼容的模式。
1,CPOL (Clock Polarity): 定义了SPI时钟信号在空闲状态下的电平。
CPOL=0: SCK空闲时为低电平。
CPOL=1: SCK空闲时为高电平。
2,CPHA (Clock Phase): 定义了数据采样的时钟边沿。
CPHA=0: 数据在SCK的第一个边沿被采样。
CPHA=1: 数据在SCK的第二个边沿被采样。
3,这四个模式通常表示为:
模式0: CPOL=0, CPHA=0 (空闲低,第一个边沿采样)
模式1: CPOL=0, CPHA=1 (空闲低,第二个边沿采样)
模式2: CPOL=1, CPHA=0 (空闲高,第一个边沿采样)
模式3: CPOL=1, CPHA=1 (空闲高,第二个边沿采样)
关键:
务必查阅SPI从设备的数据手册来确定其支持的SPI模式,并在主机端进行相应配置。例如,本教程针对的GD25QXX系列FLASH通常支持SPI模式0和模式3。
3,通用SPI模块开发步骤 (以STM32为例)
开发一个通用的SPI模块与外设通信,通常遵循以下步骤:
1,硬件连接:
将MCU的SPI引脚 (SCK, MOSI, MISO) 连接到从设备的对应引脚。
将MCU的一个通用GPIO引脚连接到从设备的CS引脚。
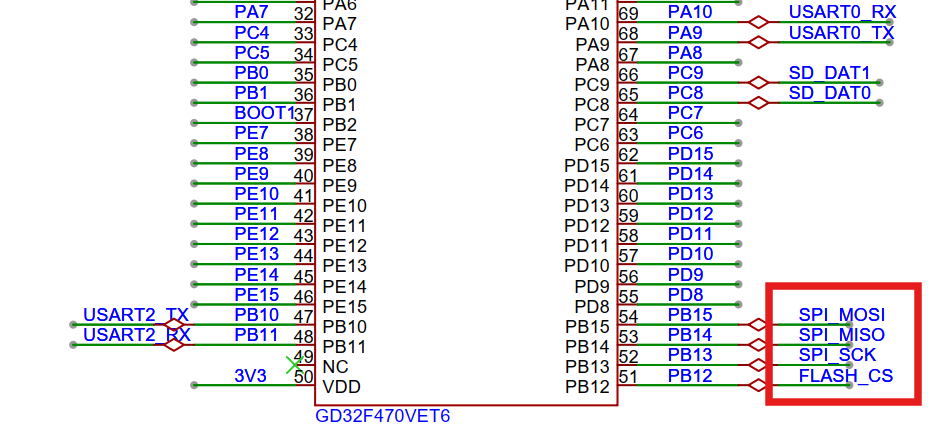
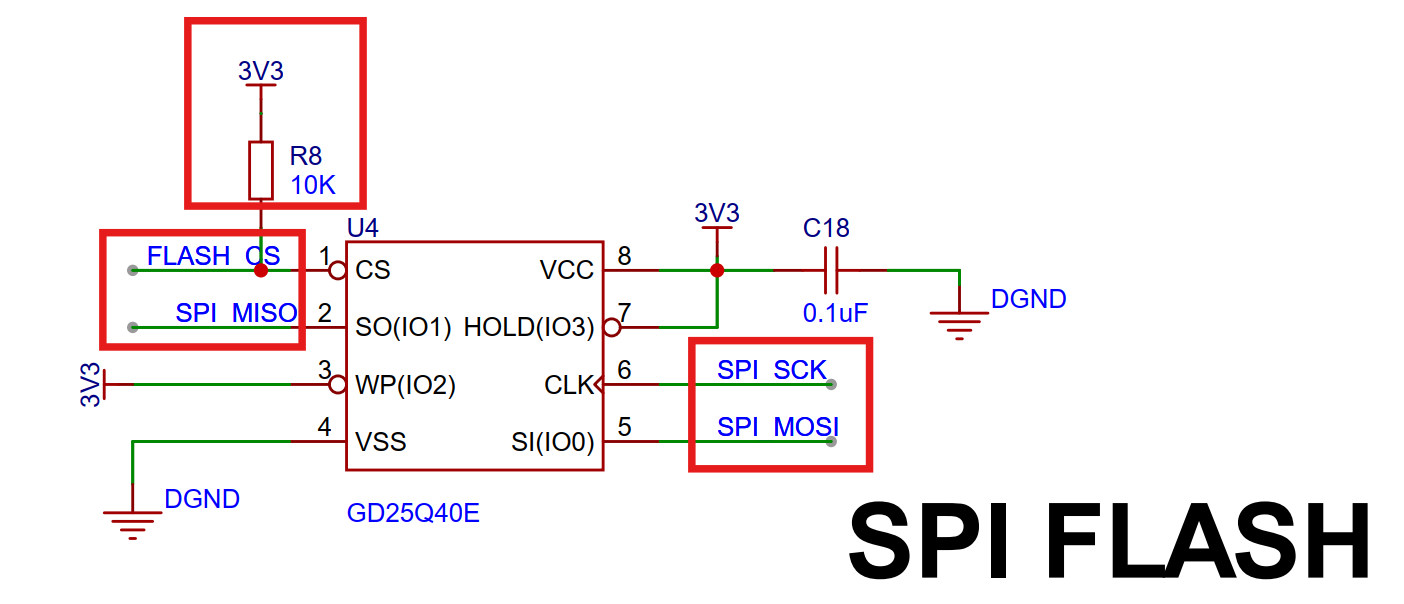
确保电源和地线连接正确,根据需要添加上拉或下拉电阻 (尽管SPI信号线通常不需要外部拉电阻,但CS线有时会根据具体情况添加上拉以确保空闲时为高电平)。
2,STM32CubeMX 配置思路:
1,启用SPI外设: 在CubeMX中选择一个SPI接口 (如SPI1, SPI2等),并设置为Full-Duplex Master模式。
2,SPI参数配置:
Data Size: 通常为8 Bits (根据从设备要求,也可能为16 Bits等)。
First Bit: MSB First 或 LSB First (根据从设备要求)。
Clock Polarity (CPOL) 和 Clock Phase (CPHA): 根据从设备数据手册选择正确的SPI模式。
Baud Rate Prescaler: 设置SPI时钟速率。初始阶段可选择较低速率以保证通信稳定,调试成功后再根据从设备和MCU能力适当提高。波特率不能超过从设备支持的最大时钟频率。
NSS (Slave Select) Management: 对于由GPIO控制CS的情况,通常选择Software模式 (即Hardware NSS Signal: Disable)。这意味着你需要手动控制CS引脚的电平。
3,GPIO引脚配置:
SCK, MOSI, MISO引脚: 配置为对应的SPI复用功能 (Alternate Function Push-Pull)。
CS引脚: 配置为GPIO_Output模式 (Push-Pull),初始电平设为High (因为CS通常低电平有效)。
4,(可选) DMA配置: 对于大量数据传输,可以配置DMA以减轻CPU负担。
5,(可选) 中断配置: 可以配置SPI中断 (如传输完成中断、错误中断) 以进行异步处理。
生成代码。
3,驱动代码结构设计 (应用层视角):
- 底层SPI发送/接收函数: 封装HAL库的SPI发送、接收、发送和接收函数。例如,一个SPI_SendByte(uint8_t data)和SPI_ReceiveByte()或SPI_TransmitReceiveByte(uint8_t txData)函数。
// 示例:HAL库的简单封装
uint8_t SPI_TransmitReceive(SPI_HandleTypeDef *hspi, uint8_t tx_byte) {uint8_t rx_byte;HAL_SPI_TransmitReceive(hspi, &tx_byte, &rx_byte, 1, HAL_MAX_DELAY);return rx_byte;
}
- CS引脚控制函数: 提供CS_Enable() (拉低CS) 和CS_Disable() (拉高CS) 函数。
void SPI_CS_Low(void) {HAL_GPIO_WritePin(SPI_CS_GPIO_Port, SPI_CS_Pin, GPIO_PIN_RESET);
}
void SPI_CS_High(void) {HAL_GPIO_WritePin(SPI_CS_GPIO_Port, SPI_CS_Pin, GPIO_PIN_SET);
}
- 设备特定操作函数: 基于底层函数,根据从设备的数据手册实现具体的命令序列。例如,对于SPI FLASH,会有读取ID、擦除扇区、页编程、读取数据等函数。每个这类函数内部会管理CS的使能/失能,并调用SPI发送/接收函数来交换指令、地址和数据。
// 示例:读取设备ID的伪代码结构
uint16_t Read_Device_ID(SPI_HandleTypeDef *hspi) {uint8_t cmd = DEVICE_READ_ID_CMD; // 特定设备的读ID指令uint8_t id_high, id_low;SPI_CS_Low(); // 片选使能SPI_TransmitReceive(hspi, cmd); // 发送读ID指令id_high = SPI_TransmitReceive(hspi, DUMMY_BYTE); // 读取高字节ID (可能需要发送虚拟字节)id_low = SPI_TransmitReceive(hspi, DUMMY_BYTE); // 读取低字节IDSPI_CS_High(); // 片选失能return ((uint16_t)id_high << 8) | id_low;
}
- 开发与调试要点:
仔细阅读从设备数据手册: 这是最重要的步骤!数据手册包含了所有关于SPI模式、命令集、时序要求、寄存器映射等关键信息。
时序匹配: 确保CS的建立时间、保持时间,以及SCK、MOSI、MISO之间的时序符合从设备的要求。CS信号必须在SPI数据传输开始前被拉低,并在传输结束后被拉高。
数据帧格式: 确认数据是MSB优先还是LSB优先,以及每个传输单元的位数(通常是8位)。
命令序列: 许多SPI设备需要特定的命令序列来执行操作,例如写使能命令后才能进行写操作。
使用逻辑分析仪或示波器: 这是调试SPI通信非常有用的工具。可以直观地看到SCK, MOSI, MISO, CS信号的波形,检查时序、数据是否正确。
错误处理: 考虑SPI通信可能发生的错误,如超时、模式错误等,并添加适当的错误处理机制 (例如,HAL库函数通常会返回状态)。
从简单操作开始: 先实现并测试最基本的操作,如读取设备ID或状态寄存器,成功后再逐步实现更复杂的功能。
以上步骤提供了一个通用的SPI应用开发框架。针对GD25QXX系列FLASH芯片,其通信依然遵循这些基本原则,但涉及特定的指令集和操作流程,这将在后续章节中详细介绍。
二,SPI CubeMX配置
1,SPI: 模式选择
SPI 模式选择决定了 STM32 在 SPI 总线上扮演的角色以及数据传输的基本方式。
传输模式 (Transmission Mode)
在 CubeMX 的 “Mode” 下拉菜单中选择 SPI 外设的工作模式。
Full-Duplex Master
Full-Duplex Slave
Half-Duplex Master
Half-Duplex Slave
Receive Only Master
Receive Only Slave
Disabled
Full-Duplex Master/Slave: 最常用 全双工模式,数据在 MOSI 和 MISO 上同时双向传输。主机发起通信并提供时钟。
Half-Duplex Master/Slave: 半双工模式,数据通过单根线 (MOSI 或 MISO,具体取决于配置和主从角色) 进行双向传输,但不能同时进行。需要正确配置 GPIO 复用和可能的外部连线。
Receive Only Master/Slave: 只接收模式。主机模式下,主机仅通过 MISO 接收数据 (不发送)。从机模式下,从机仅通过 MOSI 接收数据。
Disabled: 禁用该 SPI 外设。
配置建议: 绝大多数 SPI 外设 (如 Flash, ADC, DAC, 传感器) 使用 Full-Duplex Master 模式。如果 STM32 作为 SPI 从设备,则选择 Full-Duplex Slave。
核心选择: 根据应用需求选择正确的 SPI 角色 (Master/Slave) 和数据传输方式 (Full-Duplex 是主流)。
2,SPI: 数据与帧格式
配置 SPI 传输中每一帧数据的具体格式。
1,帧格式 (Frame Format)
Motorola
TI
Motorola: 最常用 标准的 SPI 帧格式,数据在时钟边沿变化和采样,NSS 信号在帧之间控制。
TI: TI 同步串行帧格式,在 NSS 信号有效期间会产生一个时钟脉冲用于同步,数据传输方式与 Motorola 类似。使用较少,除非外设明确要求。
配置建议: 绝大多数情况选择 Motorola。
2,数据大小 (Data Size)
设置每个 SPI 帧传输的数据位数。
通常可选范围从 4 bits 到 16 bits (具体范围取决于 STM32 型号)。
8 Bits
16 Bits
4 Bits … 7 Bits, 9 Bits … 15 Bits
配置建议: 8 Bits 是最常见的数据大小。如果外设使用16位寄存器或数据,可以选择 16 Bits 以提高效率。小于8位的情况较少见。
3,位顺序 (First Bit)
MSB First
LSB First
MSB First: 最常用 最高有效位 (Most Significant Bit) 先发送。
LSB First: 最低有效位 (Least Significant Bit) 先发送。
配置建议: 查阅从设备数据手册,绝大多数 SPI 设备使用 MSB First。
务必匹配: 帧格式、数据大小和位顺序必须与 SPI 从设备的要求完全一致,否则会导致数据解析错误。
3,SPI: 时钟配置
配置 SPI 的 SCK 时钟频率 (波特率) 和时钟模式 (极性 CPOL 与相位 CPHA)。
1,波特率预分频器 (Prescaler for Baud Rate)
通过选择一个预分频值来设置 SPI 的通信速率。SPI 时钟由连接到 SPI 外设的总线时钟 (通常是 APB1 或 APB2 时钟) 分频得到。
SPI_CLK = Peripheral_Clock / Prescaler_Value
CubeMX 会显示可选的预分频值 (如 2, 4, 8, 16, …, 256) 以及基于当前外设时钟计算出的实际波特率。
配置建议:
首先,查阅从设备数据手册,确定其支持的最大 SPI 时钟频率。
选择一个预分频值,使得计算出的 SPI 时钟速率不超过从设备的最大限制。
初次调试时,可以从一个较低的速率开始 (例如选择较大的预分频值),通信稳定后再逐步提高速率。
2,时钟极性 (Clock Polarity - CPOL)
Low
High
CPOL = Low: SCK 时钟在空闲状态为低电平。
CPOL = High: SCK 时钟在空闲状态为高电平。
3,时钟相位 (Clock Phase - CPHA)
1 Edge (First Edge)
2 Edge (Second Edge)
CPHA = 1 Edge: 数据在 SCK 的第一个时钟边沿被采样。
CPHA = 2 Edge: 数据在 SCK 的第二个时钟边沿被采样。
4,SPI 模式总结 (CPOL/CPHA)
CPOL 和 CPHA 的组合定义了四种 SPI 工作模式:
模式 CPOL CPHA 描述 (空闲电平, 采样边沿)
0 Low (0) 1 Edge (0) 空闲低,SCK 第一个边沿采样
1 Low (0) 2 Edge (1) 空闲低,SCK 第二个边沿采样
2 High (1) 1 Edge (0) 空闲高,SCK 第一个边沿采样
3 High (1) 2 Edge (1) 空闲高,SCK 第二个边沿采样
重要: 必须查阅从设备的数据手册,选择其支持的 SPI 模式。例如,许多 SPI Flash 支持模式 0 和模式 3。
核心配置: 波特率、CPOL 和 CPHA 是 SPI 通信成功的基础。任何一项与从设备不匹配都将导致通信失败。
4,SPI: NSS 管理
NSS (Negative Slave Select) 或 CS (Chip Select) 信号用于选择与之通信的从设备。STM32 SPI 外设提供了硬件和软件两种管理方式。
1,NSS 模式 (Slave Select Management)
在 “Mode” 配置块中,有 “Hardware NSS Signal” 或类似的选项,以及在 “Parameter Settings” 中有 “NSS Signal Type”。
Software
Hardware (Input)
Hardware (Output)
Software (NSS Signal Type: Software): 最常用且灵活 NSS 信号不由 SPI 外设硬件自动控制。你需要选择一个通用 GPIO 引脚作为 NSS,并在代码中手动拉低 (选中从设备) 和拉高 (取消选中)。
Hardware NSS Signal (在Mode部分) 通常设置为 Disable。
Hardware (Input) (NSS Signal Type: Hardware Input): STM32 作为 SPI 从设备时使用。NSS 引脚配置为硬件输入,当外部主机拉低此引脚时,STM32 SPI 从设备被选中。
Hardware NSS Signal (在Mode部分) 通常设置为 Hardware Input 或类似。
Hardware (Output) (NSS Signal Type: Hardware Output): STM32 作为 SPI 主机时使用。SPI 外设硬件在数据传输开始前自动拉低 NSS 引脚,传输结束后自动拉高。
Hardware NSS Signal (在Mode部分) 通常设置为 Hardware Output 或类似。
配置建议: 对于主机模式,Software NSS Management 提供了最大的灵活性,特别是当总线上有多个从设备或需要更精细控制 NSS 时序的场景。硬件 NSS 输出模式虽然简单,但可能不适用于所有情况 (例如,帧间需要保持 NSS 低电平)。
2,NSS 信号极性 (NSS Polarity - 仅硬件模式)
仅在 NSS 由硬件管理 (Hardware Input/Output) 时可配置。
Low
High
Low: 常用 NSS 信号低电平有效 (选中从设备)。
High: NSS 信号高电平有效。较少见。
3,NSS 输出脉冲模式 (NSS Pulse Mode - 仅硬件输出)
某些 STM32 型号在硬件 NSS 输出模式下,允许配置 NSS 信号在每个数据帧之间是否产生脉冲 (即在帧间拉高再拉低)。
配置建议: 查阅具体 STM32 参考手册。如果从设备要求在连续传输的帧之间保持 NSS 低电平,则应禁用脉冲模式。
软件 NSS 控制: 如果选择软件 NSS,记得在 GPIO 配置中将对应引脚设为 Output Push-Pull,并在代码中实现:
// 伪代码 - 具体宏和引脚需替换
#define SPIx_NSS_GPIO_PORT GPIOB
#define SPIx_NSS_PIN GPIO_PIN_12void SPIx_NSS_Low() { HAL_GPIO_WritePin(SPIx_NSS_GPIO_PORT, SPIx_NSS_PIN, GPIO_PIN_RESET); }
void SPIx_NSS_High() { HAL_GPIO_WritePin(SPIx_NSS_GPIO_PORT, SPIx_NSS_PIN, GPIO_PIN_SET); }// 在 SPI 传输前后调用
// SPIx_NSS_Low();
// HAL_SPI_Transmit(...);
// SPIx_NSS_High();
5,SPI: CRC 计算
SPI CRC (Cyclic Redundancy Check) 功能可以在数据传输过程中自动计算和校验 CRC 值,以检测传输错误,增强数据完整性。
1,CRC 计算 (CRC Calculation)
Disabled
Enabled
Disabled: 默认/常用 不使用 CRC 功能。
Enabled: 启用 CRC 计算和校验。启用后,SPI 外设会在发送数据时自动附加 CRC 值,并在接收数据时自动校验 CRC。
2,CRC 多项式 (CRC Polynomial)
仅在 CRC 计算启用时配置。输入 CRC 计算所使用的多项式值 (通常是 7 位、8 位或 16 位 CRC 的系数,不包括最高位的 xn)。
常用 CRC 多项式: 例如 CRC-8 (如 0x07 for x8+x2+x+1), CRC-16-CCITT (0x1021 for x16+x12+x5+1)。
STM32 SPI 的 CRC 长度通常是固定的 (例如 8 位或 16 位,取决于具体型号和数据帧长度)。你需要输入多项式的低位部分。
3,CRC 长度 (CRC Length)
8-bit
16-bit
某些 STM32 型号允许选择 CRC 值的长度,通常与数据帧大小 (Data Size) 相关联。如果 Data Size <= 8-bit,CRC 通常也是 8-bit。如果 Data Size > 8-bit (例如 16-bit),CRC 可能是 16-bit。
配置建议: 确保 CRC 长度和多项式与通信对方的配置一致。
使用场景: CRC 对于在噪声环境或长距离 SPI 通信中保证数据可靠性非常有用。但它会增加少量传输开销 (CRC 字节) 和处理时间。
如果启用 CRC,主机和从机都必须启用并使用相同的 CRC 配置 (多项式、长度、初始值等)。
当 CRC 校验失败时,SPI 外设通常会设置一个错误标志位 (CRCERR),可以触发错误中断。
使用 CRC 时,HAL 库相关函数 (如 HAL_SPI_Transmit_IT, HAL_SPI_Receive_DMA) 会自动处理 CRC 的发送和校验。
如果从设备不支持 CRC 或配置不一致,启用 CRC 会导致通信失败。
6,SPI: DMA 配置
使用 DMA (Direct Memory Access) 可以在 CPU 不干预的情况下自动传输 SPI 数据,显著提高总线利用率和系统性能,特别是在高速或大数据量传输时。
1,添加 DMA 请求 (Add DMA Request)
在 CubeMX 的 SPI 配置页面下找到 “DMA Settings” 标签页。根据需要,可以为发送 (Tx) 和/或接收 (Rx) 添加 DMA 请求。
点击 “Add” 按钮,选择:
SPIx_TX: 用于主机发送数据或从机发送数据。
SPIx_RX: 用于主机接收数据或从机接收数据。
2,DMA 通道配置 (DMA Request Settings)
为每个添加的 DMA 请求 (Tx 或 Rx) 配置参数:
1,Stream/Channel: 选择一个可用的 DMA 通道/流 (CubeMX 通常会自动分配)。
2,Direction: 方向。
SPIx_TX: Memory To Peripheral
SPIx_RX: Peripheral To Memory
(由 CubeMX 自动设置)。
3,Priority: DMA 通道优先级 (Low, Medium, High, Very High)。
4,Mode: DMA 传输模式。
Normal: 常用 传输完指定长度的数据后停止。适用于大多数 SPI 传输。
Circular: 环形模式。当需要连续不断地从 SPI 接收数据 (例如 ADC 连续采样) 或发送固定模式的数据时使用。
5,Increment Address: 地址自增设置。
Peripheral: 不勾选 SPI 数据寄存器 (DR) 地址固定。
Memory: 勾选 内存缓冲区地址需要递增。
6,Data Width: 数据宽度(外设 Peripheral / 内存 Memory)。
如果 SPI Data Size 为 8 Bits: Peripheral: Byte, Memory: Byte。
如果 SPI Data Size 为 16 Bits: Peripheral: Half Word, Memory: Half Word。
确保 DMA 的数据宽度与 SPI 配置的 Data Size 匹配。
配置建议:
对于大数据量或高速 SPI 通信,强烈建议启用 DMA (Tx 和 Rx 都启用)。
Mode 通常设置为 Normal。
Increment Address 勾选 Memory,不勾选 Peripheral。
Data Width 务必与 SPI 的 Data Size 匹配,并使用对应类型的 DMA 缓冲区 (uint8_t[] for Byte, uint16_t[] for Half Word)。
使用 DMA 时,通常还需要配合启用 NVIC 中的 DMA 中断来获知传输完成或发生错误。
HAL 库函数: 启用 DMA 后,应使用带 DMA 的 HAL 函数进行传输,例如:
HAL_SPI_Transmit_DMA(), HAL_SPI_Receive_DMA(), HAL_SPI_TransmitReceive_DMA()。
7,SPI: 中断配置 (NVIC)
SPI 外设可以产生多种中断事件,通知 CPU 传输状态、错误条件或需要处理数据。与 DMA 结合使用时,通常由 DMA 中断处理数据传输完成,而 SPI 中断用于错误处理。
1,NVIC 设置 (NVIC Settings)
需要在 CubeMX 的 “NVIC Settings” 标签页中,为对应的 SPI 外设启用中断。
SPIx global interrupt: Enabled
启用 SPI 全局中断后,可以在代码中通过 HAL 库使能或禁止特定的 SPI 中断源 (如 Tx Buffer Empty, Rx Buffer Not Empty, Error flags)。
配置建议:
不使用 DMA,中断驱动模式: 必须启用 SPI 全局中断。在代码中,你会使用如 HAL_SPI_Transmit_IT(), HAL_SPI_Receive_IT() 这类函数,它们会管理具体的 SPI 事件中断。
使用 DMA 模式:
推荐启用 SPI 全局中断: 主要用于捕获和处理 SPI 相关的错误中断 (如 Overrun, Mode Fault, CRC Error)。DMA 传输完成由 DMA 的中断处理。
在这种情况下,SPI 的数据传输相关的中断 (TxE, RxNE) 通常由 HAL 的 DMA 驱动函数间接管理,或者不直接使用。
中断优先级 (Preemption Priority / Sub Priority): 根据系统需求合理配置。
2,相关的 HAL 回调函数
启用中断后,HAL 库会在相应事件发生时调用对应的回调函数(弱定义,用户需在自己的代码中重新实现)。
主要回调函数:
HAL_SPI_TxCpltCallback(): 发送完成 (中断或 DMA 模式)。
HAL_SPI_RxCpltCallback(): 接收完成 (中断或 DMA 模式)。
HAL_SPI_TxRxCpltCallback(): 发送和接收均完成 (中断或 DMA 模式)。
HAL_SPI_TxHalfCpltCallback(), HAL_SPI_RxHalfCpltCallback(), HAL_SPI_TxRxHalfCpltCallback(): 半传输完成回调 (主要用于 DMA)。
HAL_SPI_ErrorCallback(): 发生错误时调用 (如 Mode Fault, Overrun, Underrun, CRC Error)。在此回调中,可以通过检查 SPI 句柄的 ErrorCode 字段来判断具体错误类型。
HAL_SPI_AbortCpltCallback(): 主动中止传输完成时调用。
注意: 在 DMA 模式下,TxCpltCallback, RxCpltCallback, TxRxCpltCallback 主要由 DMA 传输完成中断触发,而不是 SPI 自身的数据事件中断。
中断策略:
轮询模式 (不推荐): 不启用任何中断,代码中循环检查状态标志位。效率低下。
中断模式: 启用 SPI 全局中断。在回调函数中处理数据和服务。适用于数据量不大或速率不高的场景。
DMA + 中断模式 (推荐):
启用 DMA 通道中断 (在 DMA 配置中) 来处理数据传输完成 (TxCplt/RxCplt)。
启用 SPI 全局中断来处理 SPI 错误 (ErrorCallback)。
这是最高效的方式。
8,SPI: GPIO 配置
正确配置 SPI 通信所使用的 MOSI, MISO, SCK 以及 NSS (如果软件控制) 引脚的 GPIO 功能是 SPI 正常工作的基础。
1,引脚选择 (Pin Selection)
在 CubeMX 的 Pinout 视图中,找到要使用的 SPI 外设 (如 SPI1),点击其 MOSI, MISO, SCK 功能,然后在右侧的芯片引脚图中选择具体的物理引脚。
如果使用软件 NSS, 也需要选择一个通用 GPIO 引脚作为 NSS。
一个 SPI 功能通常可以映射到多个不同的 GPIO 引脚上,根据 PCB 布局选择合适的引脚。
2,GPIO 配置 (GPIO Settings Tab)
在 CubeMX 的 SPI 配置页面下,切换到 “GPIO Settings” 标签页 (或直接在 Pinout 视图中点击引脚配置),可以查看和微调已选定引脚的配置:
MOSI (Master Out Slave In):
主机模式: Alternate Function Push Pull
从机模式 (Full/Half Duplex): Alternate Function Input (或 Push Pull,取决于具体实现和 STM32 型号,通常 Input 就够了)
MISO (Master In Slave Out):
主机模式: Alternate Function Input (或 Push Pull)
从机模式: Alternate Function Push Pull
SCK (Serial Clock):
主机模式: Alternate Function Push Pull
从机模式: Alternate Function Input
NSS (Software Controlled):
主机模式: GPIO_Output (Push Pull), 初始电平 High (若 NSS 低有效)。
从机模式 (如果需要软件判断 NSS): GPIO_Input。
NSS (Hardware Controlled):
主机输出: Alternate Function Push Pull
从机输入: Alternate Function Input (或 Push Pull)
GPIO Pull-up/Pull-down: 通常为 No pull-up and no pull-down。SPI 信号线一般不需要外部或内部上拉/下拉,除非特定从设备或总线条件要求 (例如,某些情况下 MISO 线可能需要上拉)。NSS 软件控制时,如果担心悬空,可根据有效电平考虑上拉或下拉。
Maximum output speed: High 或 Very High。为确保信号边沿陡峭以满足 SPI 时序要求,应选择较高的 GPIO 输出速度。
关键点:
模式必须是 Alternate Function Push Pull (对于输出信号如主机的SCK/MOSI, 从机的MISO) 或 Alternate Function Input (对于输入信号如主机的MISO, 从机的SCK/MOSI)。
GPIO 速度应设置为 High 或 Very High。
不正确的 GPIO 配置是 SPI 通信失败的常见原因之一。仔细核对每个引脚的角色和配置。