柔性直流输电系统介绍及simulink模型的搭建
1. 柔性直流输电的运行原理
柔性直流输电系统由电压源型换流器与直流输电线路构成, 图 1‑1所示为单端电压源型换流器原理图。柔性直流输电系统的功率可以双向流动,即换流器既可以作为整流站将从交流系统接收的功率通过直流线路输送出去,也可以作为逆变站将通过直流线路输送来的功率送至交流系统中。
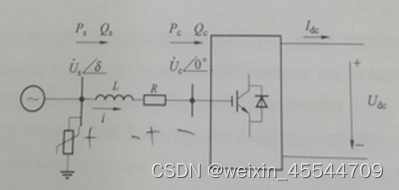
图 1‑1单端电压源换流器原理图
图 1‑1中,L——换流电抗器的等效电感;
R——换流器和换流电抗器的等效损耗电阻;
Us——交流母线基波电压相量;
Uc——换流器输出基波电压相量;
δ——Uc滞后于Us的角度;
Ps、Qs——交流系统向公共连接点处注人的有功功率和无功功率;
Pc、Qc——换流器从交流系统侧吸收并传送到直流线路的有功功率和无功功率。
对于电压源换流器,在稳态分析中普遍采用了如下基本假设:
(1)电压源换流器的三相交流母线电压是对称平衡的正弦波:
(2)电压源换流器本身的电气结构是完全对称平衡的;
(3)以电压源换流器的额定容量为基值,换流电抗器的标么值为0.1-0.2。
忽略换流器与变压器损耗及谐波分量时,交流系统向换流器发出的有功功率和无功功率分别为
![]() (1-1)
(1-1)
![]() (1-2)
(1-2)
![]() (1-3)
(1-3)
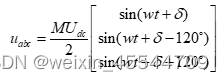
式中 μ——直流电压利用率;
X——换流电抗;
Udc——直流电压额定值;
M——调制比;
δ——交流系统基波电压与换流器出口电压的相位差。
对电压源换流器进行调制时,调节PWM调制波的相角δ和调制比M即可实现对有功功率Ps和无功功率Qs的控制。可以看出:
(1)当δ>0,即Us超前Uc时,换流器工作于整流状态,从交流系统吸收有功功率;
(2)当δ<0,即Us滞后Uc时,换流器工作于逆变状态,向交流系统注入有功功率;
(3)当δ=0,换流器不传输有功功率,工作在STATCOM运行模式下;
(4)当Us-Uccosδ>0, 换流器消耗无功功率;
(5)当Us-Uccosδ<0,换流器发出无功功率;
(6)当Us-Uccosδ=0,,电压源换流器工作于单位功率因数状态,只传输有功功率而不发出或消耗无功功率。
由式(1-2)和式(1-3)可以得到
 (1-4)
(1-4)
由此可知,Ps和Qs的基本工作区城为以(0,Us2X)为原点,以UsUcX为半径的四象限圆形区域。
稳态运行时,换流器与交流系统间交换的有功功率Ps和无功功率Qs的大小还免以下因素的影响:
(1)最大直流电压的限制;
(2)通过换流器最大电流Imax的限制,即
![]() (1-5)
(1-5)
(3)最大直流线路电流Idc,max的限制,即
![]() (1-6)
(1-6)
将式(1-3)代入式(1-5)中得到
 (1-7)
(1-7)
以系统额定容量和交流母线额定电压为基准值进行标么化,可以得到换流器的稳态功率特性标么值模型为
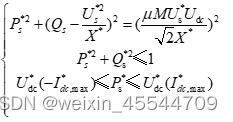 (1-8)
(1-8)
系统设计过程,需要考虑换流器的稳态P-Q特性图与调制比 M和移相角δ的关系。以![]() 为例来说明,由式可以得到功率特性图,如图2-2所示。
为例来说明,由式可以得到功率特性图,如图2-2所示。
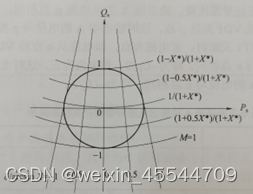
图 1‑2 换流站稳态P-Q特性图
2.电压源换流器的控制策略
2.1 基于d-q轴的解耦控制策略
2.1.1基于d-q轴的解耦控制的数学模型
由图 2‑1所示的柔性直流输电的结构原理图可以得到abc三相静止坐标系下的交流侧三相动态微分方程为:
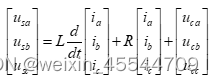 (2-1)
(2-1)
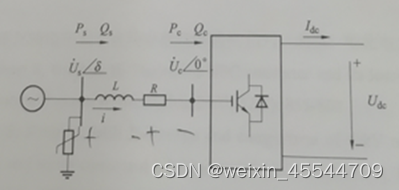
图 2‑1 单端电压源换流器原理图
式(2-1)用相量形式可以表示为
![]() (2-2)
(2-2)
 (2-3)
(2-3)
式(2-2)经过整理可得
 (2-4)
(2-4)
由Park变换将式(2-4)由abc坐标系变换为dq坐标系可得
![]() (2-5)
(2-5)
式中,Park变换矩阵P及其逆矩阵P-1分别为
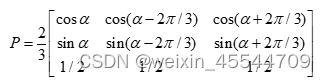 (2-6)
(2-6)
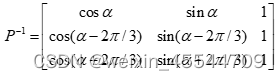 (2-7)
(2-7)
式(2-5)可表示为
 (2-8)
(2-8)
在稳态情况下,由式(2-8)可得
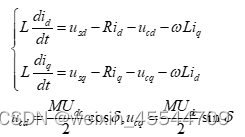 (2-9)
(2-9)
令d轴以电网电压向量定位,即![]() 并令ωL为耦合电抗X,则式可以化简为
并令ωL为耦合电抗X,则式可以化简为
 (2-10)
(2-10)
交流系统注入换流站的有功功率Ps为
 (2-11)
(2-11)
化简得
![]() (2-12)
(2-12)
交流系统注入换流站的无功功率Qs为
![]() (2-13)
(2-13)
由和可知,Ps仅由d轴电流id控制,Qs仅由q轴电流iq控制,通过控制交流电流的两个分量id和iq可以分别实现交流系统与换流器交换的有功功率和无功功率的解耦。
2.1.2 基于d-q轴的解耦控制器的设计
基于上节介绍的解耦控制原理,本节将涉及解耦控制器。由式和可知,id![]() 和iq
和iq![]() 相互耦合。 对d轴和q轴的解耦,采用前向解耦技术来补偿式中的耦合项ωLiq
相互耦合。 对d轴和q轴的解耦,采用前向解耦技术来补偿式中的耦合项ωLiq![]() 和ωLid
和ωLid![]() 。定义如下2个新的输入量ud
。定义如下2个新的输入量ud![]() 和uq
和uq![]()
 (2-14)
(2-14)
同时有
 (2-15)
(2-15)
这样就在d轴和q轴方向上,取得了如式所示的2个独立的一阶模型,也就得到了2个独立的电流控制回路。这来了你刚刚和电流控制回路与应的交流电流形成反馈控制,前馈补偿掉电压平衡方程式中的耦合项,即可得到ucd![]() 和ucq
和ucq![]() 。采用比例积分(PI)控制器,设计如图所示的双闭环解耦控制器,其中外环用于控制功率(包括直流电压和交流电压等与功率相关的被控量),内环用于控制电流。
。采用比例积分(PI)控制器,设计如图所示的双闭环解耦控制器,其中外环用于控制功率(包括直流电压和交流电压等与功率相关的被控量),内环用于控制电流。
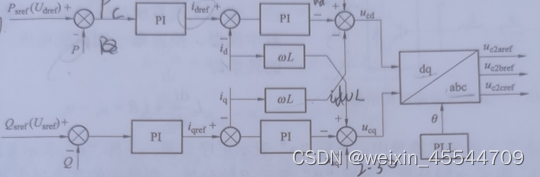
图 2‑2 基于d-q轴的解耦控制器
上述为交流系统是有源系统的d-q轴解耦控制器的设计。当受端系统是无源网络时,图介绍了一种逆变测定交流电压的控制方法,在其规定的参考方向下,定交流电压控制器如图所示
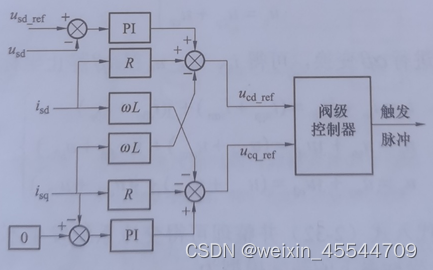
图 2‑3定交流电压控制器的结构示意图
交流系统发生不对称故障时会引起电压源换流器的交流侧发生负序电流分量,引起交流系统三相不对称,而且会导致直流侧产生大量的非特征谐波。交流侧产生的抚恤电流分量复制较低时,会导致交流系统故障保护动作,严重时将烧毁换流器。直流侧产生的非特征谐波还会引恶化控制器的控制性能,影响系统的正常运行。
3.基于simulink模型的建立
本文基于simulink建立VSC-HVDC直流输电模型,功率为3000MW,交流电压为220kV,直流电压为500kV,送电端采用定有功功率和定无功功率双闭环控制,受电端采用定直流电压和定无功控制,运行结果稳定。
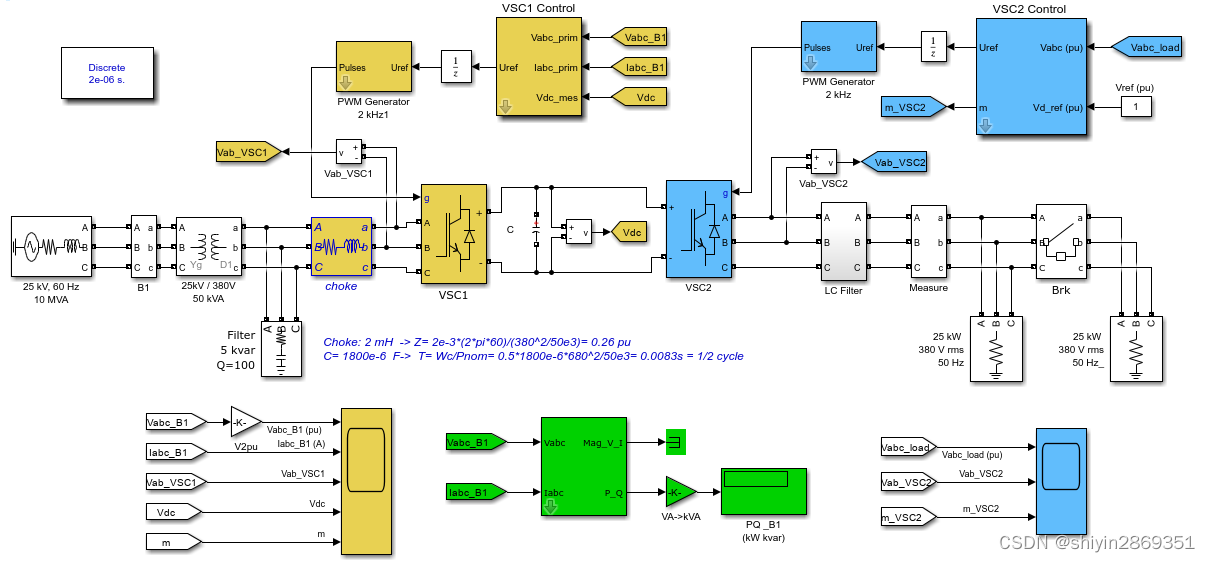
图3-1 基于simulink搭建的柔性直流输电仿真模型
有需要模型或者需要交流的可以加企鹅2504024627
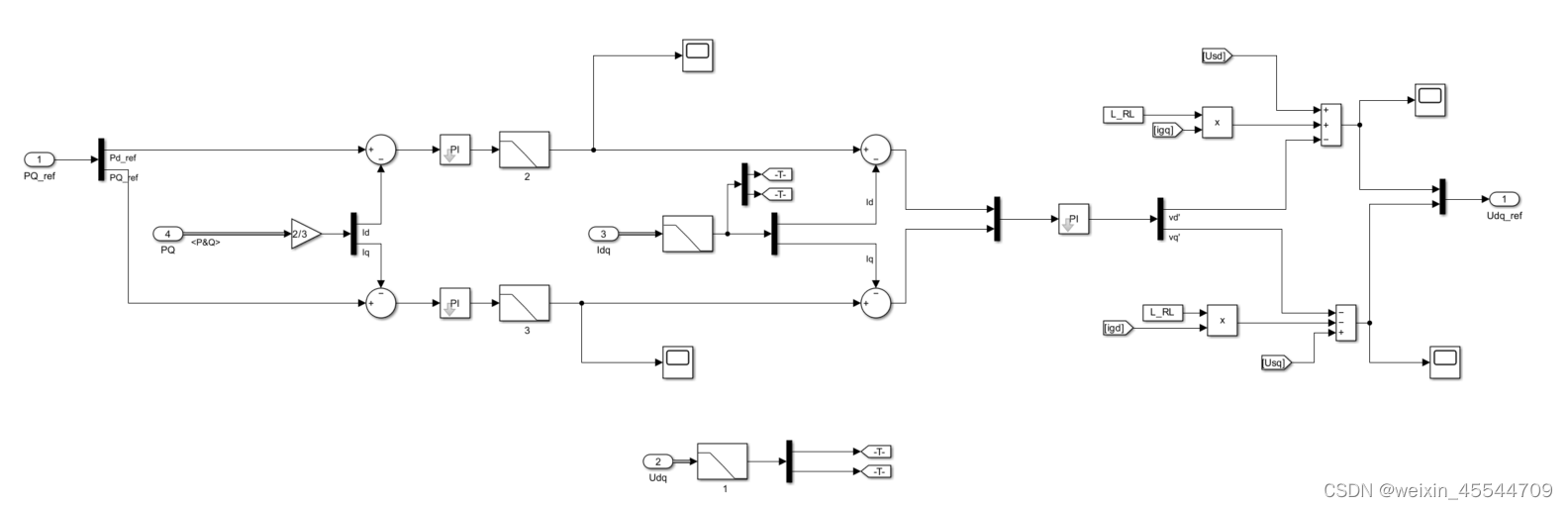
图3-2 送电端换流器的双闭环控制
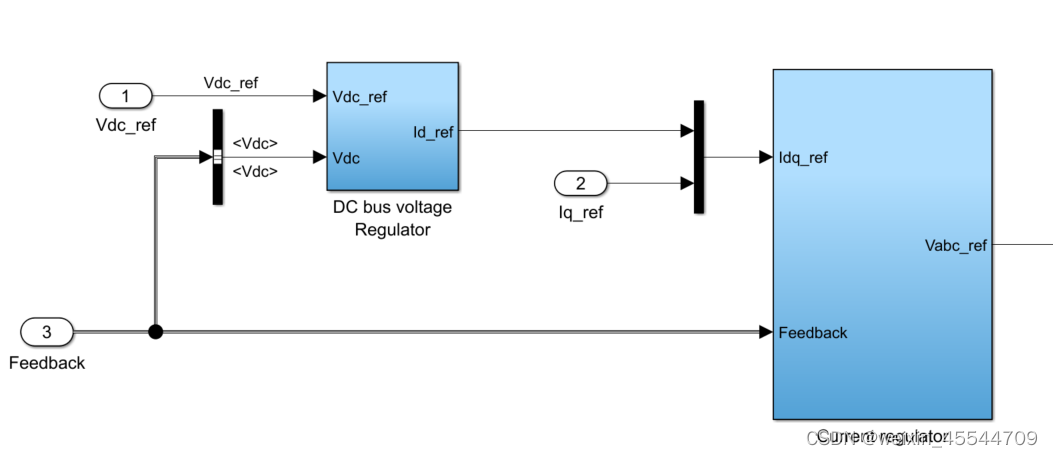
图3-3 受电端换流器的定直流电压的双闭环控制
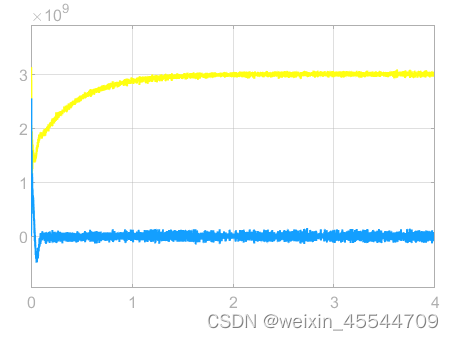
图3-4 输送有功功率和无功功率
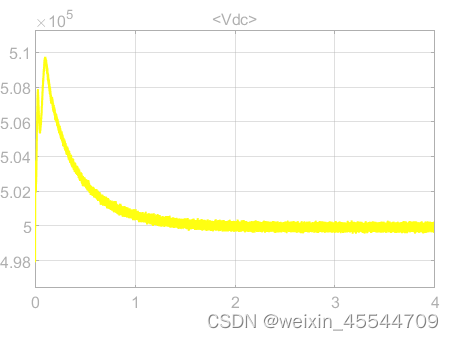
图3-5 直流电压500kV