R语言机器学习算法实战系列(二十五)随机森林算法多标签分组分类器及模型可解释性
禁止商业或二改转载,仅供自学使用,侵权必究,如需截取部分内容请后台联系作者!
文章目录
- 介绍
- 教程内容
- 加载必要的R包(带详细注释)
- 1. 加载数据
- 2. 数据分割(按Species分层抽样)
- 3. 数据预处理配方
- 4. 创建随机森林模型(多分类)
- 5. 创建工作流
- 6. 设置交叉验证和参数调优
- 7. 参数调优
- 8. 选择最佳参数
- 9. 最终模型训练
- 10. 模型预测
- 11. 模型评估
- 11.1 创建结果数据框
- 11.2 计算评估指标
- 11.3 单独计算每个类别的指标(多分类情况)
- 11.4 计算混淆矩阵
- 12. ROC曲线
- 13. 变量重要性
- 14. 使用last_fit进行最终评估
- 15. DALEX模型可解释性分析
- 15.1 准备数据
- 15.2 创建DALEX解释器
- 15.3 全局解释
- 15.4 本地解释(测试集第一个样本)
- 总结
- 系统信息
介绍
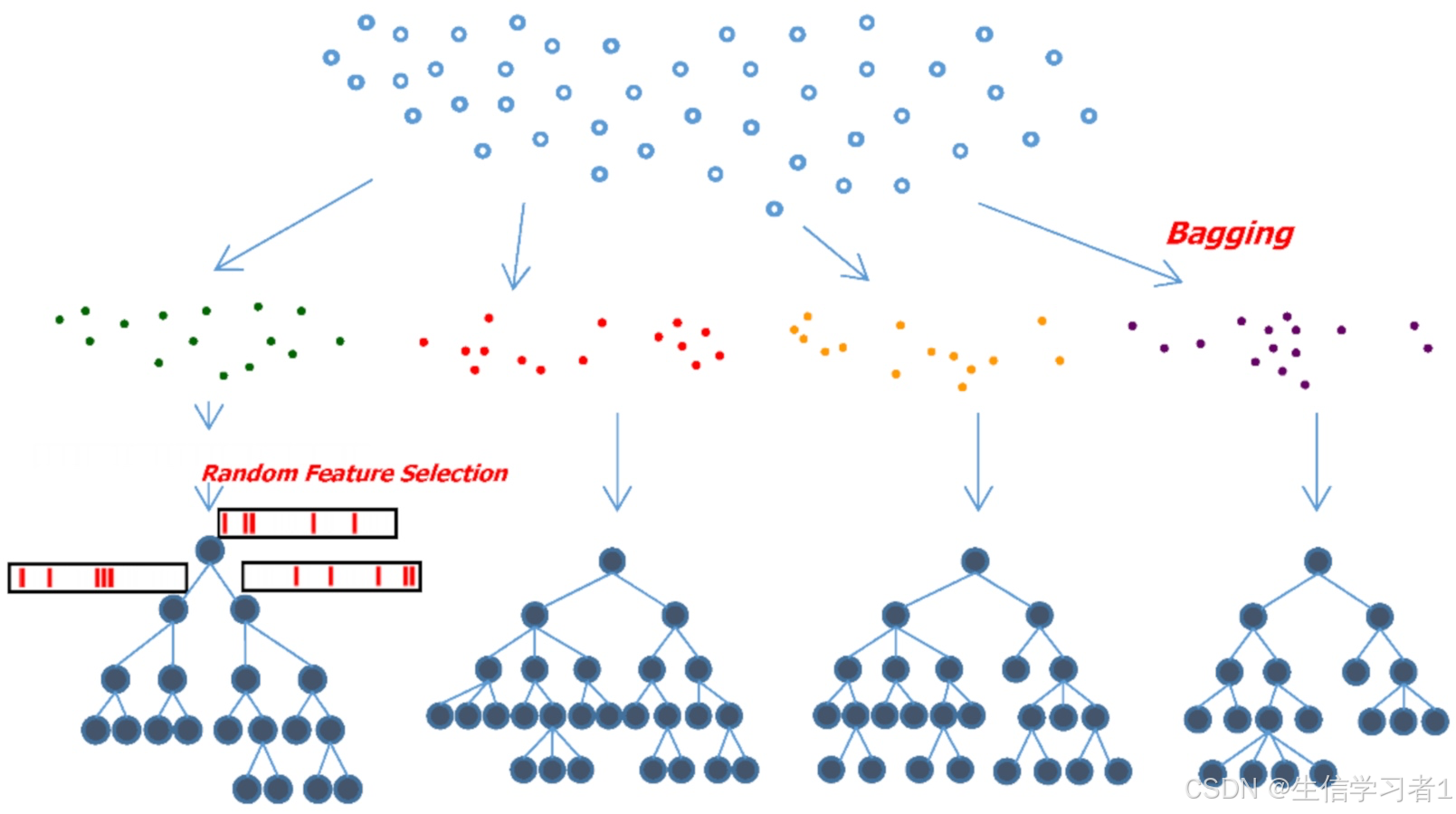
本教程实现了一个完整的随机森林多分类模型构建与解释流程,涵盖数据预处理、模型训练、超参数调优、性能评估及可解释性分析。随机森林(Random Forest)是一种强大的集成学习方法,通过构建多棵决策树并整合其预测结果,显著提升模型的泛化能力和鲁棒性。本流程特别针对多分类任务设计,支持对多个类别的概率预测,并通过交叉验证优化关键参数(如 mtry 和 min_n),确保模型性能最优。
在模型评估阶段,代码提供了全面的分类指标(如准确率、召回率、F1分数)和可视化工具(如混淆矩阵、ROC曲线)。其中,ROC曲线分析不仅展示各类别的分类性能,还计算AUC值及其置信区间,直观反映模型区分能力。此外,通过DALEX框架,代码实现了