ubuntu22.04在 Docker容器中安装 ROS2-Humble
22.04 安装 docker 容器并实现rviz功能
1 docker pull命令拉取包含ROS-Humble的镜像:
docker pull osrf/ros:humble-desktop-full-jammy
docker images验证该镜像是否拉取成功。

使用镜像osrf/ros:humble-desktop-full-jammy创建并运行容器
sudo docker run -it --name ros2_humble_test osrf/ros:humble-desktop-full-jammy /ros_entrypoint.sh bash
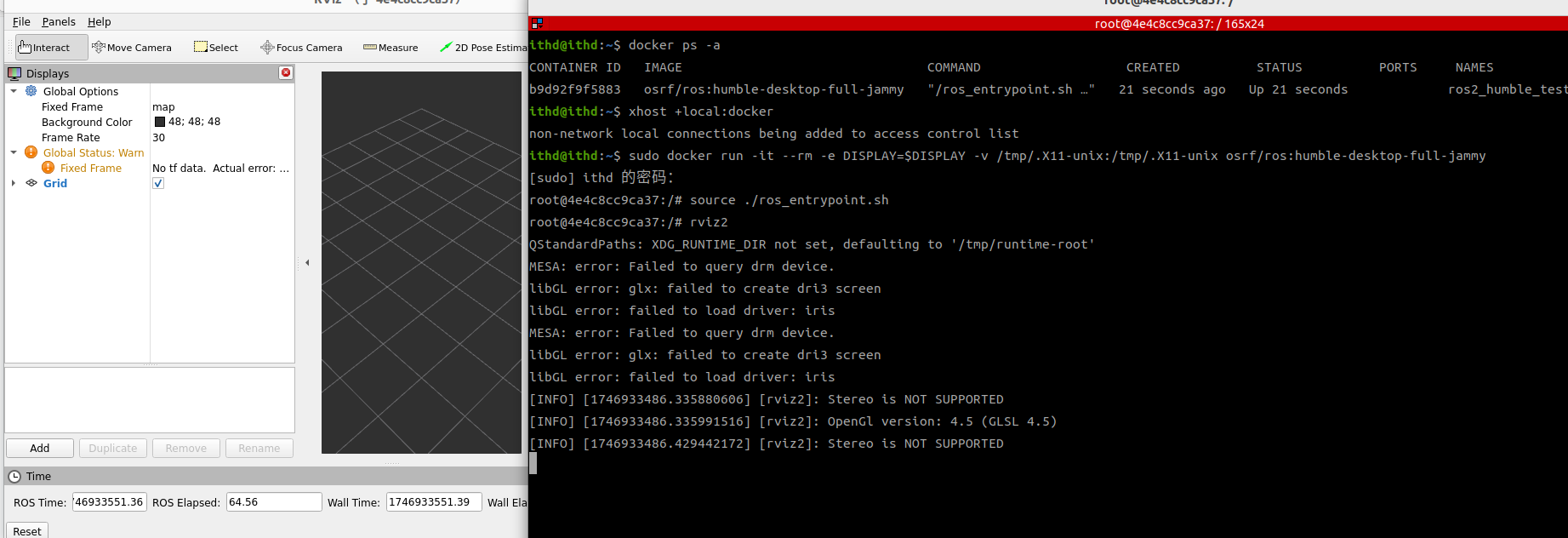
在本机执行docker ps -a验证是否创建成功,如果出现下列的输出,说明创建成功:

运行Rviz
xhost +local:docker
sudo docker run -it --rm -e DISPLAY=$DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix osrf/ros:humble-desktop-full-jammy
在容器内部执行下列指令配置ros的环境变量,并运行rviz2:
source ./ros_entrypoint.sh
rviz2