机器人手臂“听不懂“指令?Ethercat转PROFINET网关妙解通信僵局
机器人手臂"听不懂"指令?Ethercat转PROFINET网关妙解产线通信僵局
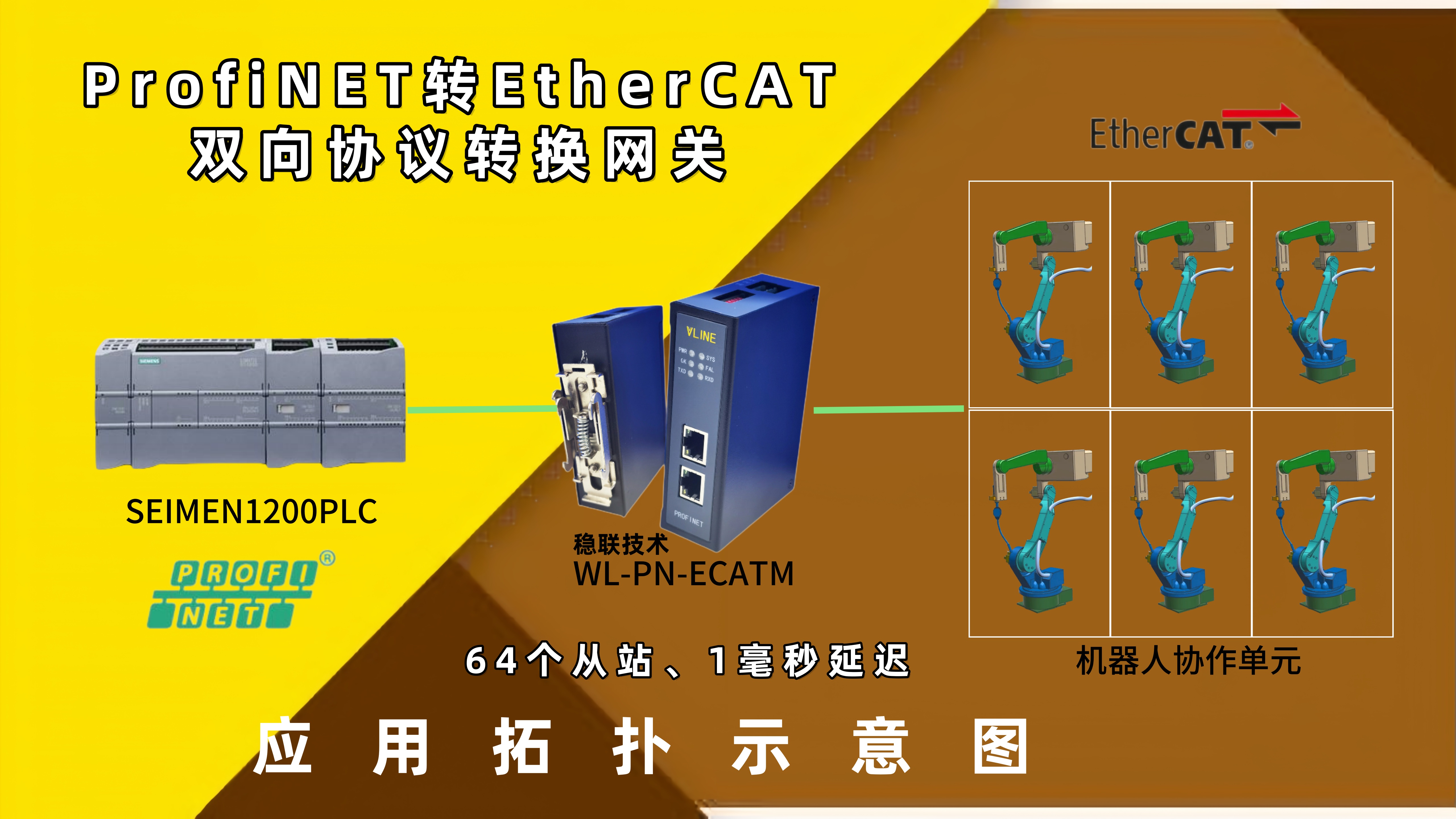
协作机器人(如KUKA iiWA)使用EtherCAT控制,与Profinet主站(如西门子840D CNC)同步动作。
客户反馈:基于Profinet-EtherCAT网关-稳联技术WL-PN-ECATM的机器人协作单元应用案例
场景与需求
某高端精密制造企业在自动化加工生产线中,需要将KUKA iiWA协作机器人(支持EtherCAT)无缝集成到以西门子840D CNC(Profinet主站)为核心的数控系统中,以实现高精度同步上下料及在线检测。产线要求机器人动作与CNC加工节拍严格匹配,同时确保人机协作的安全性。
问题与挑战
1.协议转换难题:机器人采用EtherCAT,而CNC系统基于Profinet,传统方案难以实现低延迟通信。
2. 实时同步要求:加工节拍需控制在1.5秒内,机器人运动轨迹必须与CNC主轴启停精准匹配。
3. 安全与柔性需求:需在保证力控灵敏度的同时,实现急停信号的无损传输。
解决方案:Profinet-EtherCAT网关稳联技术WL-PN-ECATM的应用
1. 硬件架构优化:
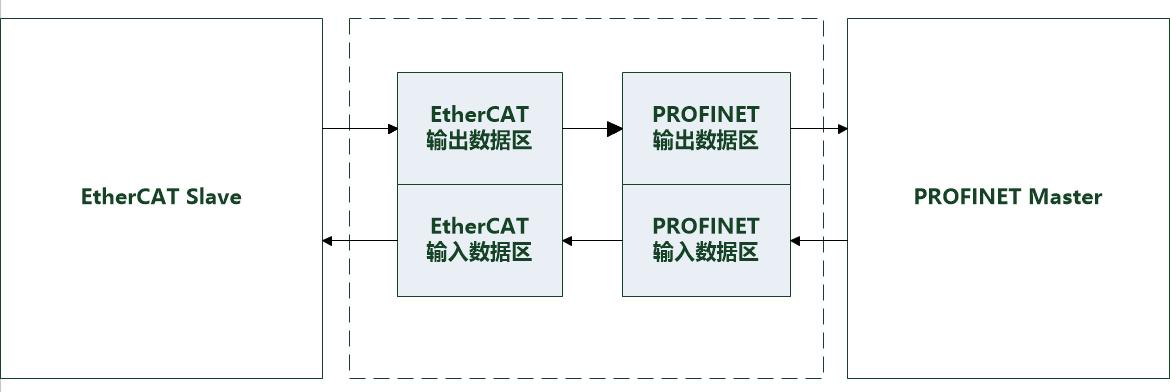
采用**Profinet-EtherCAT网关**(如WL-PN-ECATM)作为协议转换枢纽,实现Profinet主站与EtherCAT从站的实时数据交互。
网关配置为Profinet IO设备,同时映射EtherCAT PDO(过程数据对象)至CNC的IO地址空间。
2. 软件配置关键步骤:
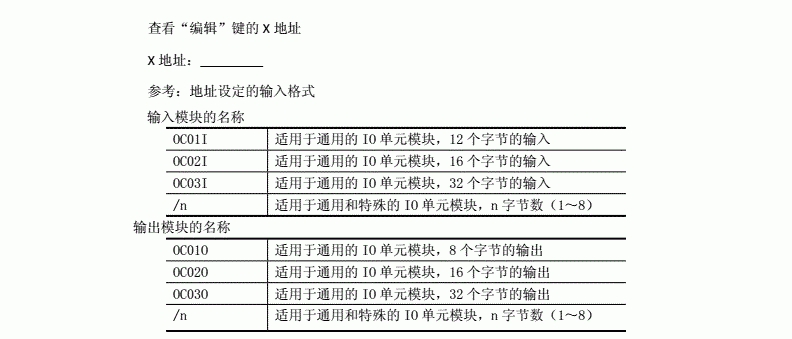
CNC侧:在TIA Portal中定义网关为Profinet IO设备,分配输入/输出字节地址(如IB256-QB256)。
机器人侧:通过KUKA Sunrise.OS配置EtherCAT主站参数,设定同步周期为2ms,确保与CNC的时钟同步(DC同步精度±100ns)。
3. 调试与优化:
使用Wireshark抓包分析网络负载,优化EtherCAT帧结构,减少冗余数据。
在CNC中设置同步域(SyncZone),机器人接收M代码后,在0.3秒内完成定位,误差<±0.1mm。 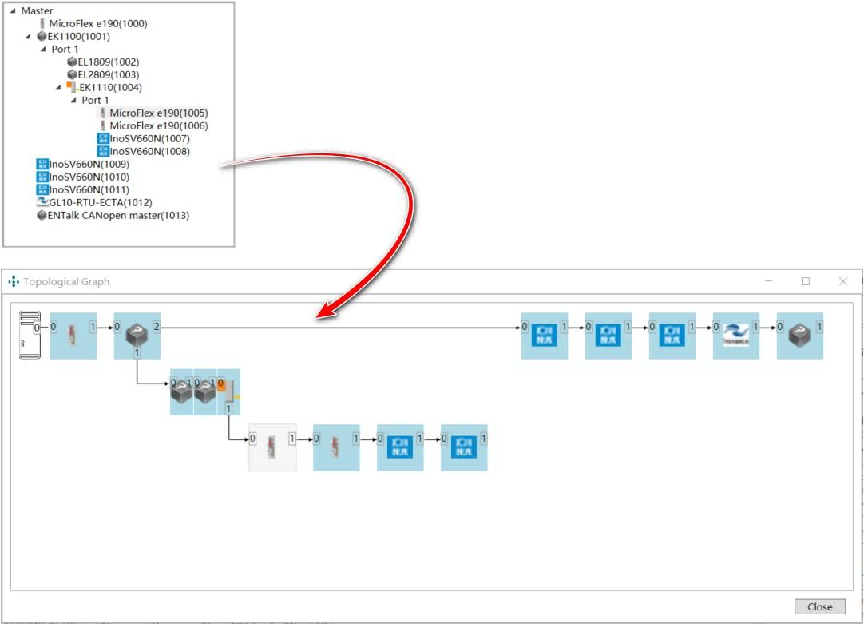
实施效果
效率提升:产线节拍缩短至1.4秒,设备综合效率(OEE)提高40%。
稳定性验证:网关连续运行6个月无通信故障,Profinet-EtherCAT数据丢包率<0.001%。
客户评价:“稳联技术WL-PN-ECATM网关方案突破了协议壁垒,调试周期比原计划减少60%,且兼容后续扩展的EtherCAT IO模块。”
注:本案例数据基于特定工况,实际效果可能因配置差异有所不同。