梯形路径规划详解
在正式讲这个之前呢,我们先来讲讲底盘的运动学解算:
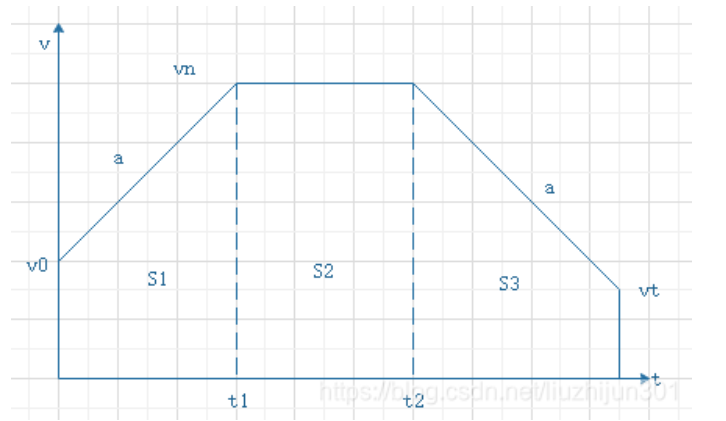
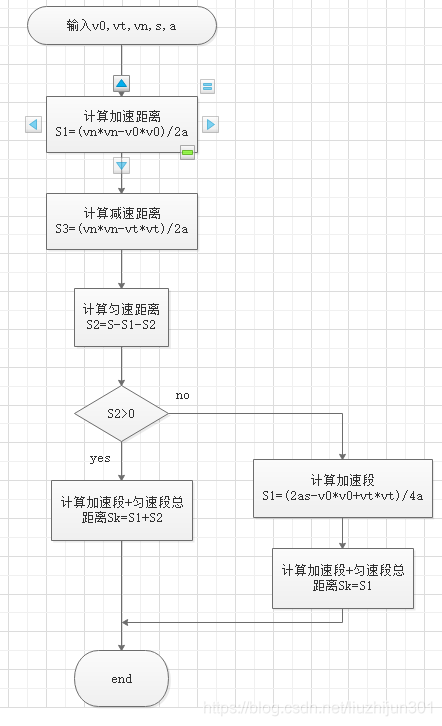
v0为初速度,vn为匀速运行速度,vt为末速度,加速和减速阶段加速度为a,总路程为S。
则加速阶段走过的路程S1=(vn*vn-v0*v0)/2a,减速阶段走过的路程S3=(vn*vn-vt*vt)/2a,
则匀速阶段走过的路程S2=S-S1-S2
若S2<=0,代表此时没有匀速阶段,此时梯形速度退化成下图:
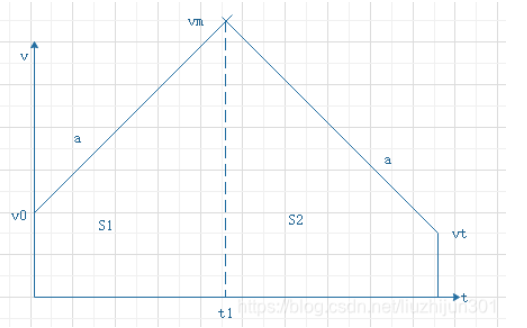
加速段和减速段相交点位最大速度Vm,由下列关系式成立:
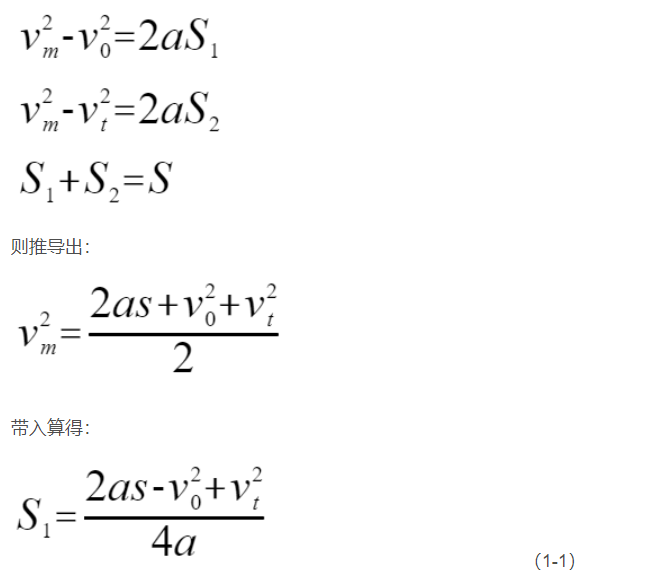
S1为加速阶段走过的总路程,若S1<0,代表没有加速阶段只有减速阶段,若S2>S,代表只有加速阶段没有减速阶段。
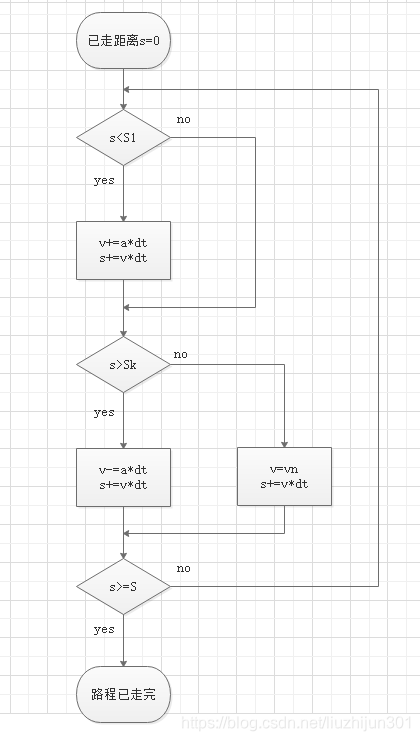
最后总结一下梯形加速度规划方案:
在规划函数中:
在速度生成函数中: