average per-pixel disparity error: EPE及不同距离值下的误差曲线
写在前面
-
本文内容
介绍epe的概念,作用;
由epe推导出的不同距离下的物理误差曲线
一句话简单理解:epe是用于深度估计、以像素为单位的误差度量方式 -
平台/环境
python -
转载请注明出处:
https目录
- 写在前面
- EPE
- **1. 视差与深度的关系**
- **2. EPE 的计算方法**
- **3. EPE 的特点**
- **4. 与其他指标的关系**
- **5. 为何使用 EPE?**
- **举例**
- **总结**
- 计算
- 参考
- 完
EPE
FoundationStereo: Zero-Shot Stereo Matching文中的描述是:
“EPE” computes average per-pixel disparity error. “BP-X” computes the percentage of pixels where the disparity error is larger than X pixels. “D1” computes the percentage of pixels whose disparity error is larger than 3 pixels and 5% of the ground-truth disparity
在深度估计中,EPE(End-Point Error,端点误差) 是一种用于衡量预测视差(disparity)与真实视差之间误差的指标。其核心思想是逐像素比较预测值与真实值的差异,并计算全局平均误差。以下是详细解释:
1. 视差与深度的关系
- 视差(Disparity) 是立体视觉中左右图像中对应点的水平位移(单位为像素)。通过视差可以推导深度(depth):
[ 深度 = 焦距 × 基线距离 视差 ] [\text{深度} = \frac{\text{焦距} \times \text{基线距离}}{\text{视差}} ] [深度=视差焦距×基线距离]
视差越小,物体距离越远;视差越大,物体距离越近。
2. EPE 的计算方法
EPE 的定义非常简单:
[ EPE = 1 N ∑ i = 1 N ∣ 预测视差 i − 真实视差 i ] [\text{EPE} = \frac{1}{N} \sum_{i=1}^{N} | \text{预测视差}_i - \text{真实视差}_i] [EPE=N1i=1∑N∣预测视差i−真实视差i]
其中:
- N是图像中有效像素的总数(通常会忽略无真实值的像素)。
- 对每个像素的预测误差取绝对值(L1 范数),然后计算所有像素的平均值。
3. EPE 的特点
- 直观性:直接反映模型在每个像素上的预测精度。
- 单位一致性:视差单位为像素,EPE 的单位也是像素。例如,EPE=1 表示平均每个像素的预测误差为 1 像素。
- 局限性:仅衡量数值误差,不反映结构误差(如边缘模糊或物体形状错误)。
4. 与其他指标的关系
- MAE(Mean Absolute Error):与 EPE 等价,但 EPE 更常用于视差/光流任务。
- RMSE(Root Mean Square Error):对误差取平方后开根号,对大误差更敏感。
- Bad Pixel Rate:像素误差率( BP-X,Bad Pixel-X),通常计算的是视差误差大于某个阈值(如 3 像素)的像素占总像素的比例。而 EPE 则是所有像素误差的平均值。EPE 更能反映整体的误差,而像素误差率更关注误差较大的像素的比例。
5. 为何使用 EPE?
在深度估计任务中,视差是中间结果(最终深度需通过几何公式转换)。EPE 直接评估视差预测的准确性,是模型性能的核心指标。较小的 EPE 意味着更准确的深度估计。
举例
假设预测视差图某像素值为 30,真实值为 28,则误差为 ( ∣ 30 − 28 ∣ = 2 ) (|30-28|=2) (∣30−28∣=2)。若全图平均此类误差为 1.5 像素,则 EPE=1.5。
总结
EPE 是深度估计中衡量视差预测精度的基础指标,通过逐像素误差的平均值反映模型性能,值越小表示模型越精确。
计算
根据深度-视差计算原理
Z = b ∗ f d , d = b ∗ f Z Z=\frac{b*f}{d}, d=\frac{b*f}{Z} Z=db∗f,d=Zb∗f
以415传感器实际数据为例:
传感器(ov2740)大小:2.7288mm1.5498mm
基线b=55mm
在1280720分辨率下,f=910(pixel)
当物距为Z=1m(1000mm)时:
d = 55910/1000 = 50.05(pixel)
当存在双目匹配误差且误差为pe=0.42(pixel时), d = d+pe = 50.47,
Z’ = 55910/50.47 = 991.67(mm)
深度误差为abs: Ze=Z’ - Z=8.33mm, relative: 8.33/1000 = 0.833%
代码
import numpy as np
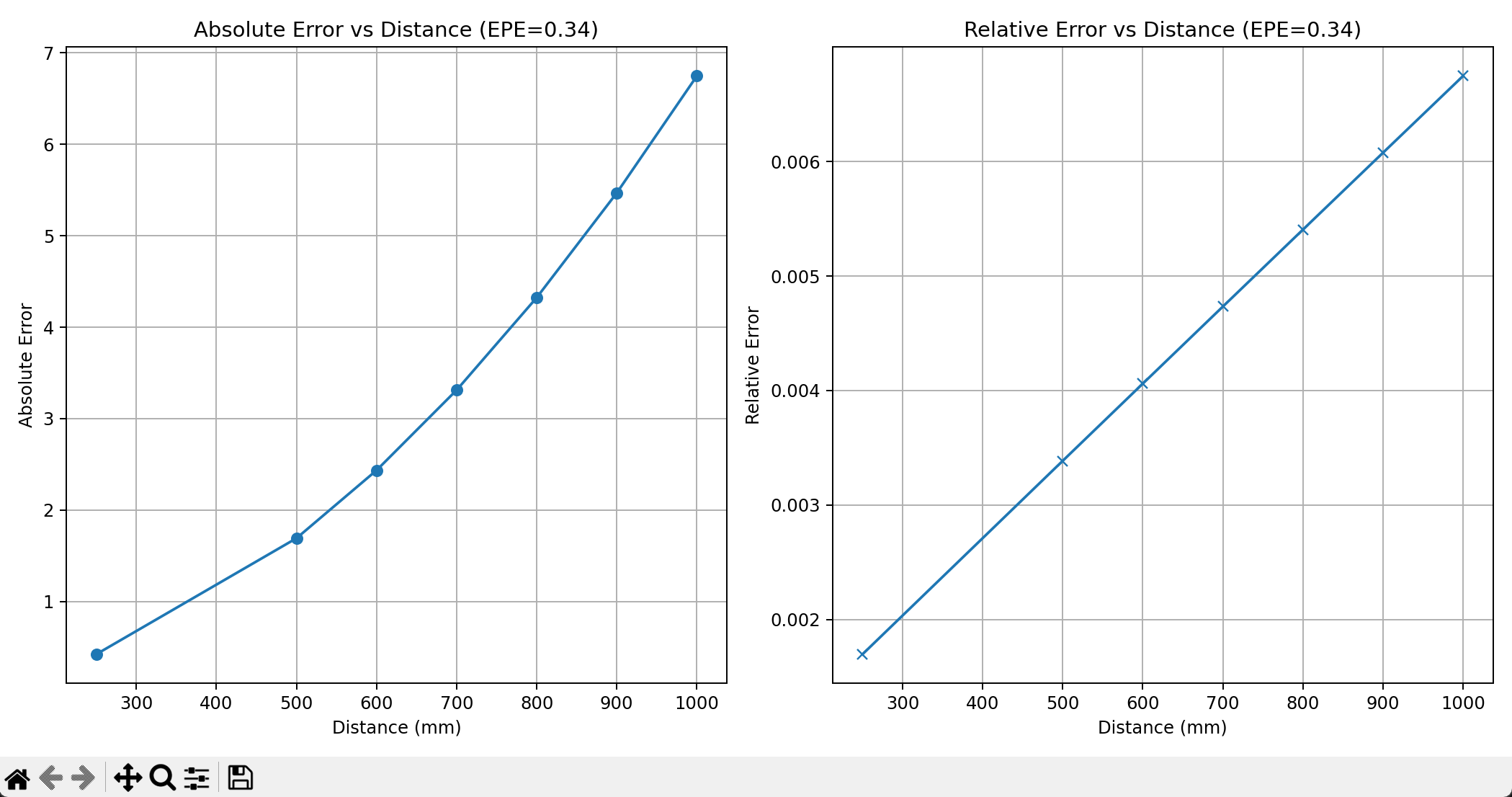
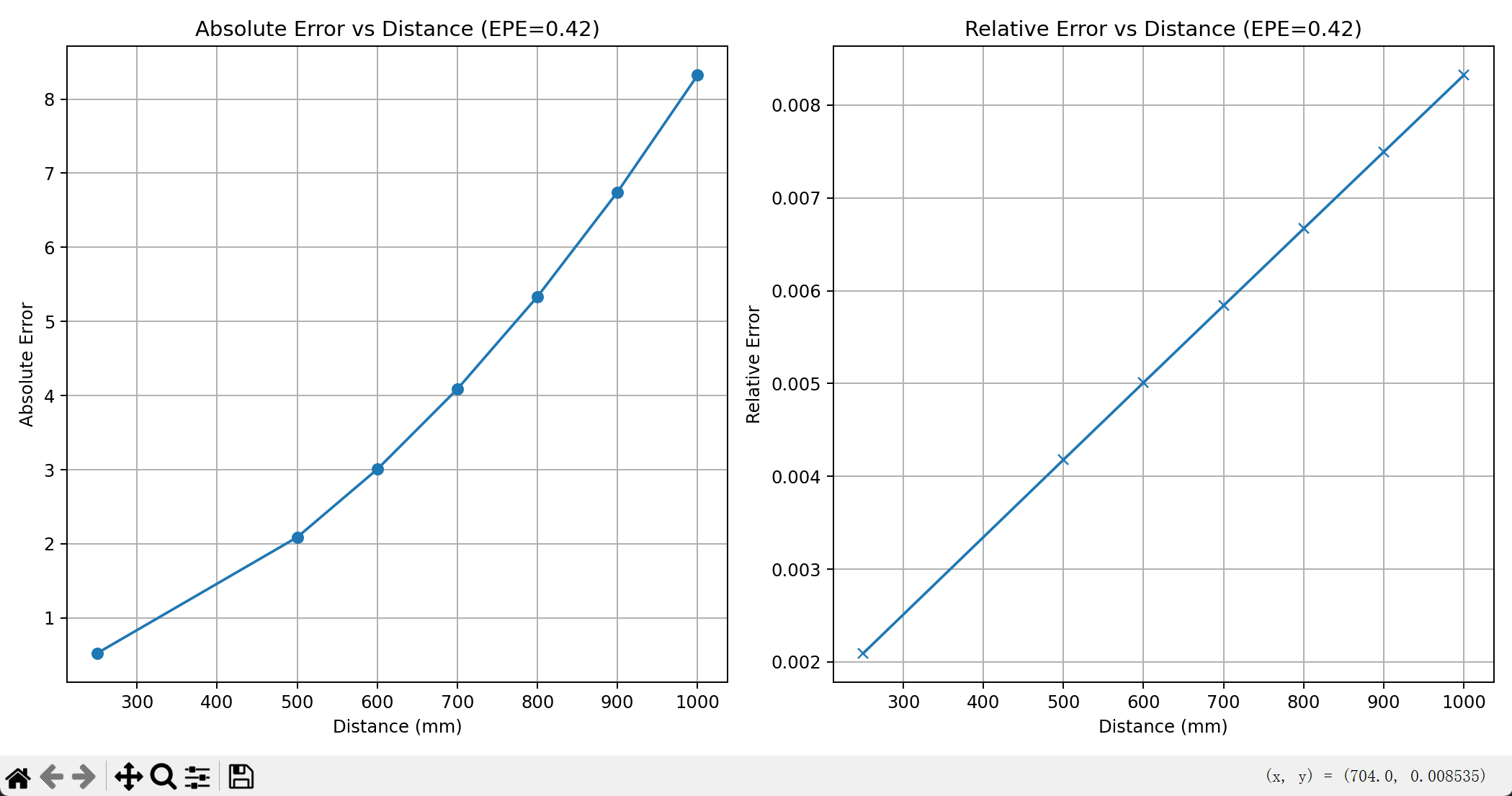
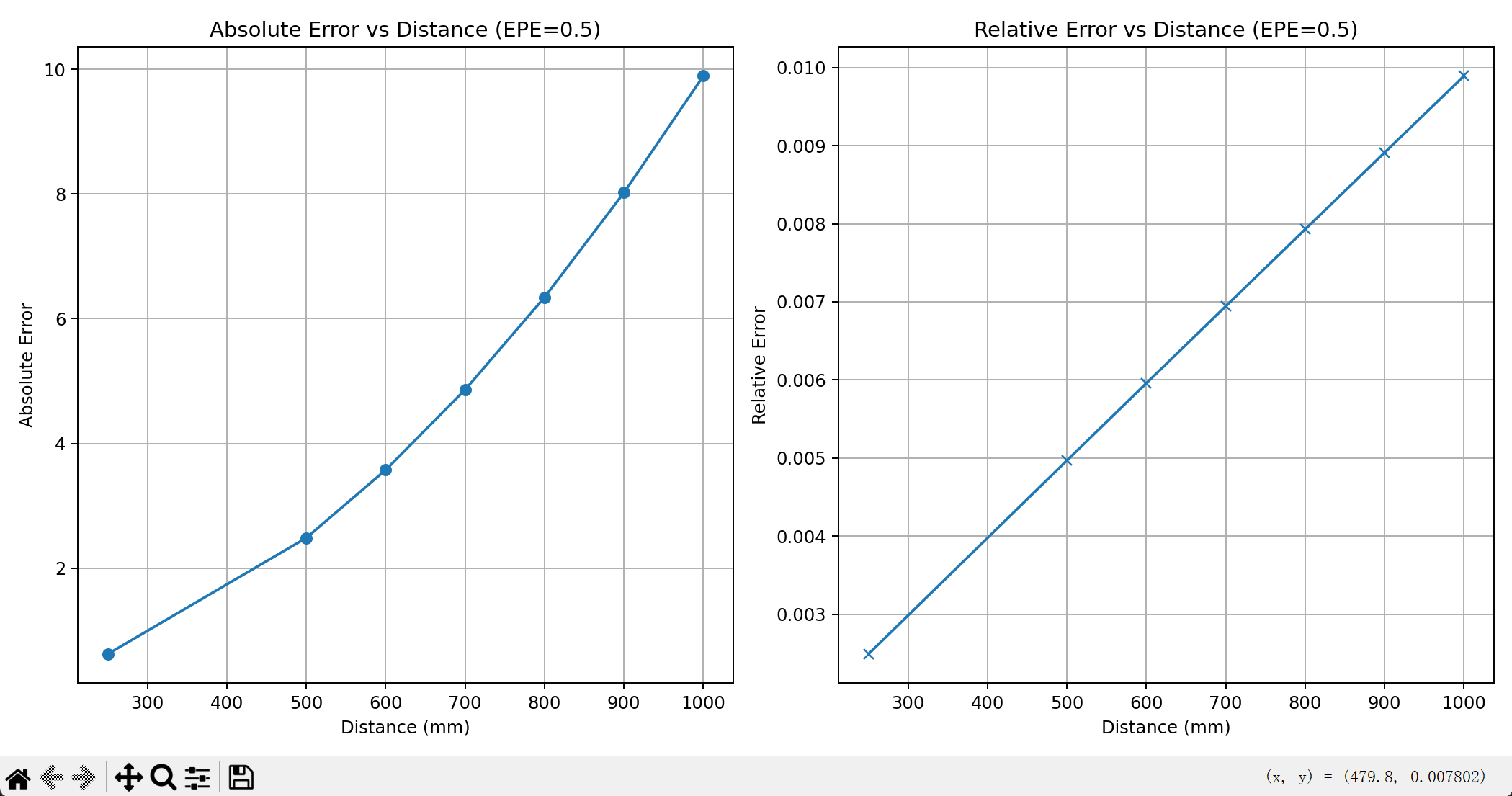
import matplotlib.pyplot as pltdef computeEPE(baseline, fx, depth, pe):bf = baseline * fxd_pixel = bf / depthabs_error = abs(bf / (d_pixel + pe) - depth)relative_error = abs(abs_error / depth)return abs_error, relative_errorif __name__ == "__main__":# "EPE" computes average per-pixel disparity errorepe_list = [0.34, 0.42, 0.50]# # 250mm - 1000mmdistance_list = [250, 500, 600, 700, 800, 900, 1000]# 250mm - 10000mm# distance_list = [# 250,# 500,# 1000,# 2000,# 3000,# 4000,# 5000,# 6000,# 7000,# 8000,# 9000,# 10000,# ]# realsense 415 base_line=55mm 1920x1080 focal=910focal = 910 base_line = 55# 为每个 epe 值绘制一张图for epe in epe_list:abs_error_list = []relative_error_list = []for distance in distance_list:abs_error, relative_error = computeEPE(base_line, focal, distance, epe)abs_error_list.append(abs_error)relative_error_list.append(relative_error)# 创建一个包含两个子图的图表plt.figure(figsize=(12, 6))# 第一个子图:绝对误差plt.subplot(1, 2, 1)plt.plot(distance_list, abs_error_list, label="Absolute Error", marker="o")plt.xlabel("Distance (mm)")plt.ylabel("Absolute Error")plt.title(f"Absolute Error vs Distance (EPE={epe})")plt.grid(True)# 第二个子图:相对误差plt.subplot(1, 2, 2)plt.plot(distance_list, relative_error_list, label="Relative Error", marker="x")plt.xlabel("Distance (mm)")plt.ylabel("Relative Error")plt.title(f"Relative Error vs Distance (EPE={epe})")plt.grid(True)# 调整布局,防止重叠plt.tight_layout()plt.show()结果曲线
epe=0.34
epe=0.42
epe=0.5
参考
FoundationStereo: Zero-Shot Stereo Matching
完
主要做激光/影像三维重建,配准、分割等常用点云算法,熟悉open3d、pcl等开源点云库,技术交流、咨询可私信