单片机-STM32部分:10、串口UART
飞书文档![]() https://x509p6c8to.feishu.cn/wiki/W7ZGwKJCeiGjqmkvTpJcjT2HnNf
https://x509p6c8to.feishu.cn/wiki/W7ZGwKJCeiGjqmkvTpJcjT2HnNf
串口说明
电平标准是数据1和数据0的表达方式,是传输线缆中人为规定的电压与数据的对应关系,串口常用的电平标准有如下三种:
TTL电平:+3.3V或+5V表示1,0V表示0
RS232电平:-3~ -15V表示1,+3~ +15V表示0
RS485电平:两线压差+2~+6V表示1,-2 ~-6V表示0(差分信号)
STM32F103RC系列芯片中,有五个串口
| 3个USART,2个UART |
IO口说明:
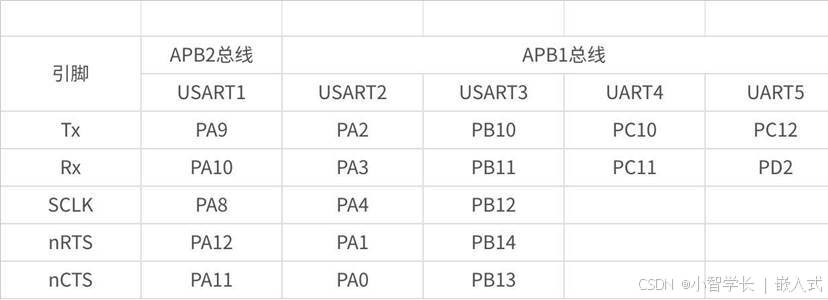
点击图片可查看完整电子表格
| TX:发送数据输出引脚。 |
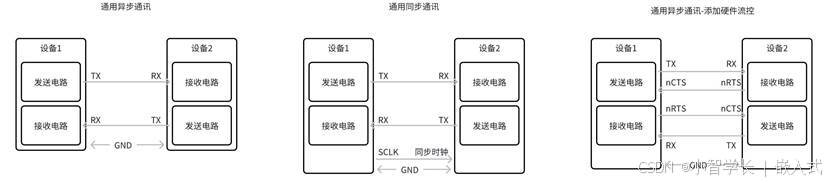
| 硬件流控说明,例如: |
创建工程,设置SWD,设置时钟。
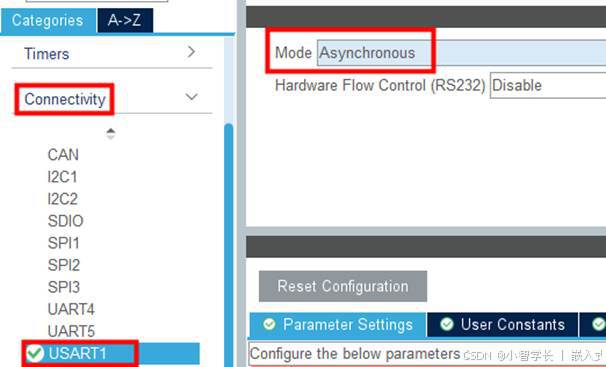
配置USART1为异步通信方式,不需要硬件流控制。
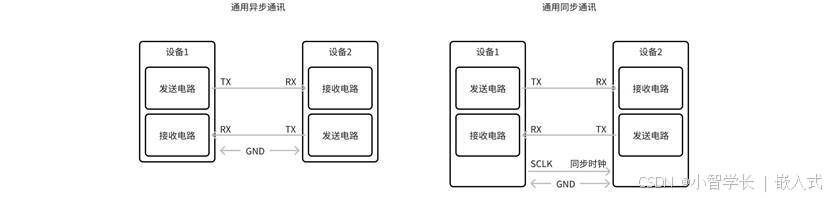
| Asynchronous(异步通讯)主要使用 |
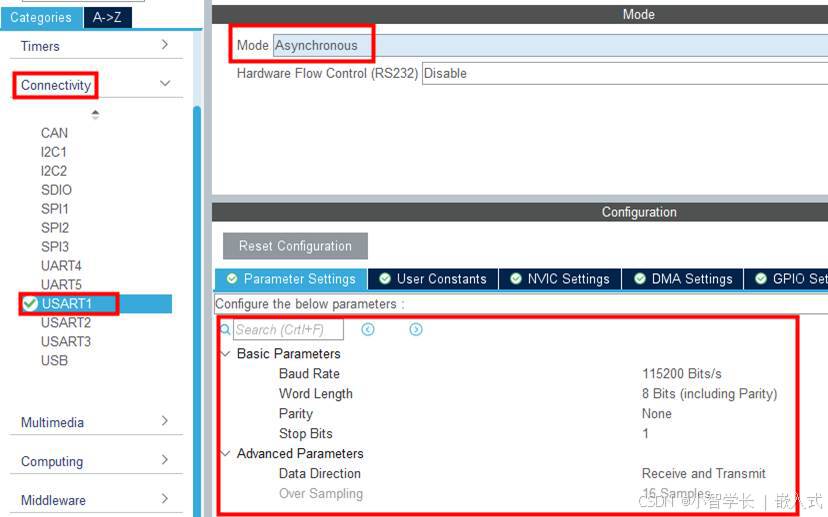
然后设置波特率为115200bps 数据长度8bit 没有校验位 1位停止位。
| 串口中,每个字节都装载在一个数据帧(10或11位)里,每个数据帧都由起始位、数据位和停止位,数据位有8个代表一个字节的8位。参数如下: |
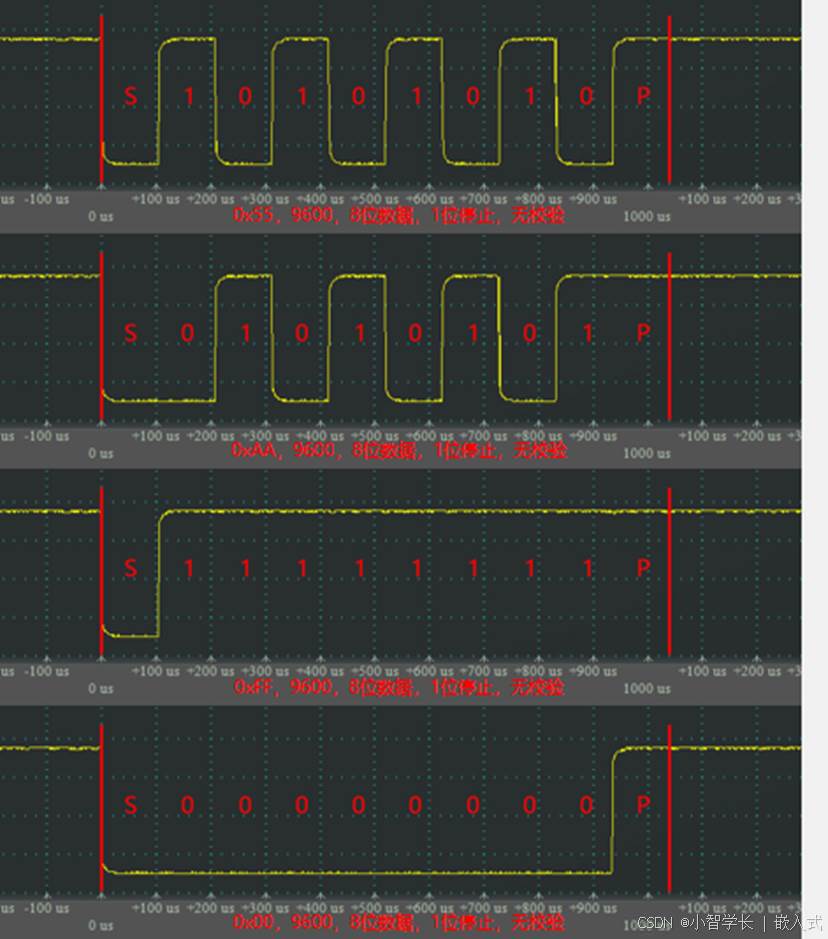
波特率9600代表1s发送9600个bit,也就是1个bit发送需要100us左右
这时,软件会自动选择PA9与PA10做为串口的发送与接收引脚。
这时,我们可以生成工程
main.c
MX_USART1_UART_Init();usart.c
void MX_USART1_UART_Init(void)
{huart1.Instance = USART1;huart1.Init.BaudRate = 115200;huart1.Init.WordLength = UART_WORDLENGTH_8B;huart1.Init.StopBits = UART_STOPBITS_1;huart1.Init.Parity = UART_PARITY_NONE;huart1.Init.Mode = UART_MODE_TX_RX;huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;huart1.Init.OverSampling = UART_OVERSAMPLING_16;if (HAL_UART_Init(&huart1) != HAL_OK){Error_Handler();}
}那如何实现串口发送或接收数据呢?
| stm32f1xx_hal_uart.h |
有多种方式,我们先来了解第一种,阻塞轮询模式
| HAL_UART_Transmit (UART_HandleTypeDef *huart, const uint8 t *pData, uint16 t Size, uint32 t Timeout) |
现在,我们先实现发送功能,在main.c中添加发送代码
while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 */uint8_t txbuf[]="Hello,world!";HAL_UART_Transmit(&huart1,txbuf,sizeof(txbuf),1000);HAL_Delay(500); }/* USER CODE END 3 */- 编译烧录至板卡,然后接好串口线连接到电脑。
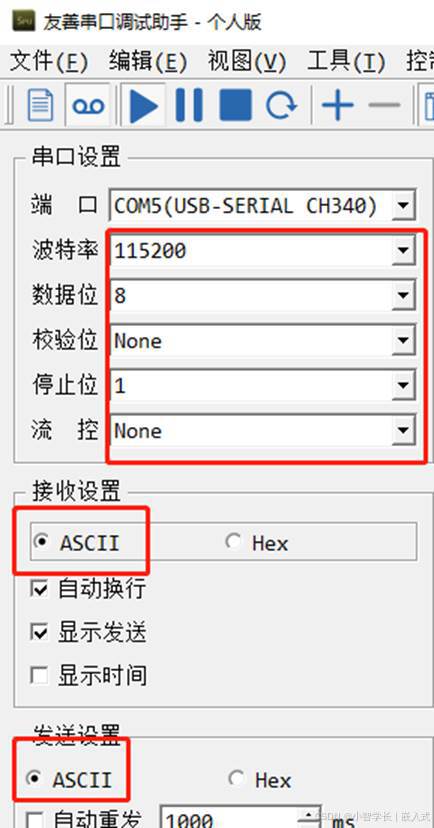
- 打开串口调试助手,选择COM口,例如下方是COM5,根据自己电脑设备管理器的COM选择,插拔USB线,会显示新COM,如果提示COM口有叹号,则需要自行搜索CH340驱动安装。
串口调试助手软件:自行安装即可:参考飞书文档
- 然后设置波特率115200 8 N 1,即可看到间隔500ms打印信息。
参考工程:
如果烧录完没打印,可以重启或复位下
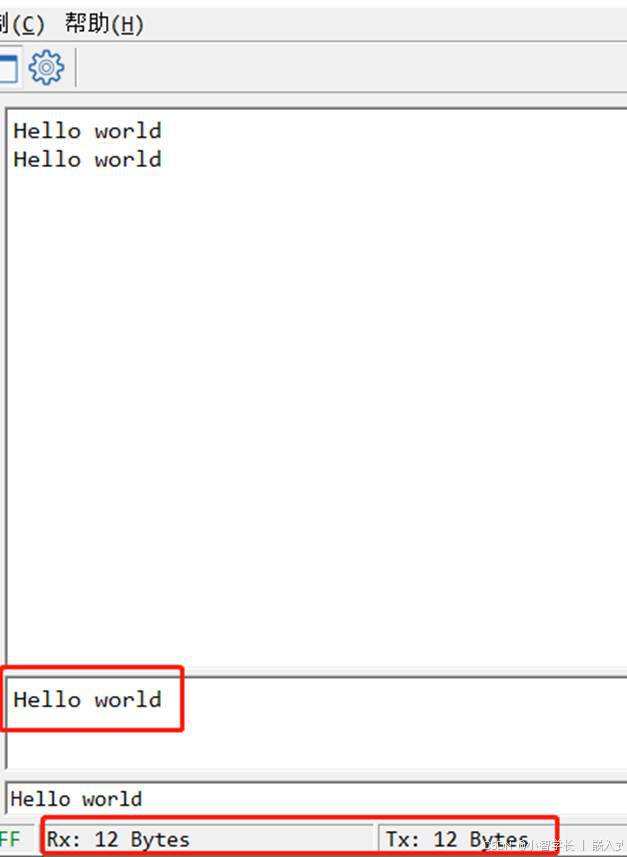
/* USER CODE BEGIN 2 */uint8_t rxbuf[12];/* USER CODE END 2 */while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 */if(HAL_UART_Receive(&huart1,rxbuf,sizeof(rxbuf),1000) == HAL_OK){HAL_UART_Transmit(&huart1,rxbuf,sizeof(rxbuf),1000);}}/* USER CODE END 3 */编译烧录至板卡,然后接好串口线连接到电脑,打开串口调试助手,设置波特率115200 8 N 1,发送ASCII码“Hello world”,
为什么“Hello world”是11个字符,我们需要接收rxbuf[12]是12个字节呢?
因为串口助手工具,会自动加上换行符,点击右侧的发送后,我们可以看到TX是12个字节。
串口中断方式
我们可以看到,上方的方式都是阻塞式发送,轮询接收的,简单的产品这样设计没有问题,但是做一些复杂的,对实时性有要求的产品时,就满足不了了,所以我们可以用到串口中断的功能,在CUBEMX中使能中断。
| 阻塞方式就好比你要拿快递,就一遍遍都前台询问快递到没到,在这期间你不能干别的, |

生成工程后,可以在stm32f1xx_it.c中看到生成了中断相关函数
/*** @brief This function handles USART1 global interrupt.*/
void USART1_IRQHandler(void)
{HAL_UART_IRQHandler(&huart1);
}void HAL_UART_IRQHandler(UART_HandleTypeDef *huart){xxxxUART_Receive_IT(huart);xxxx
}static HAL_StatusTypeDef UART_Receive_IT(UART_HandleTypeDef *huart){xxxxHAL_UART_RxCpltCallback(huart);xxxx
}
最终找到需要重写的虚函数
/*** @brief Rx Transfer completed callbacks.* @param huart Pointer to a UART_HandleTypeDef structure that contains* the configuration information for the specified UART module.* @retval None*/
__weak void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{/* Prevent unused argument(s) compilation warning */UNUSED(huart);/* NOTE: This function should not be modified, when the callback is needed,the HAL_UART_RxCpltCallback could be implemented in the user file*/
}然后在
main.c/* USER CODE BEGIN 0 */uint8_t rxbuf[10];uint8_t ackbuf[] = "ack pack";/* USER CODE END 0 *//* USER CODE BEGIN 2 */HAL_UART_Receive_IT(&huart1,rxbuf,sizeof(rxbuf));/* USER CODE END 2 *//* USER CODE BEGIN 4 */
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart){ if(huart == &huart1) //判断中断是否来自于串口1{HAL_UART_Transmit_IT(&huart1,ackbuf,sizeof(ackbuf)); //通过中断的方式发送应答数据出去HAL_UART_Receive_IT(&huart1,rxbuf,sizeof(rxbuf)); //开始接收下一轮数据}
}下载完成,点击复位。打开串口助手,连接到相应的端口,设置波特率为115200,从串口助手向单片机发送10个字节的数据,单片机将会把发过去的数据在返回给串口助手。必须发够10个字节以上的数据,才能够触发中断。

参考工程:
如果烧录完没打印,可以重启或复位下
串口中断+DMA方式
这时候,如果我们在开发产品过程中,需要频繁收发数据,且通信波特率较高时,如果采用中断方式,每收发一个字节的数据,CPU都会被打断,造成CPU无法处理其他事务。 因此在批量数据传输,通信波特率较高时,建议采用DMA方式。
|
串口中断每收发一个字节数据,CPU都会被打断 |
CPU只需要设置开始传输和处理传输结束的中断 |
DMA,全称Direct Memory Access,即直接存储器访问。
DMA传输将数据从一个地址空间复制到另一个地址空间,提供在外设和存储器之间或者存储器和存储器之间的高速数据传输。
我们知道CPU无时不刻的在处理着大量的事务,但有些事情却没有那么重要,比方说数据的复制和存储数据,如果我们把这部分的CPU资源拿出来,让CPU去处理其他的复杂计算事务,是不是能够更好的利用CPU的资源呢?
所以串口收发数据量大时可借助DMA,减轻CPU负担。即在内存与IO设备间传送一个数据块的过程中,不需要CPU的任何中间干涉,只需要CPU在过程开始时向设备发出“传送块数据”的命令,然后通过中断来得知过程是否结束和下次操作是否准备就绪。
整个过程只产生两次中断,第一次是进入DMAx_Streamy_IRQHandler;第二次进入USARTx_IRQHandler。
| 前文说过中断方式就好比你告诉前台,等快递到了给你打电话,让你亲自来取,假设你正在做着一些重要的事情,正好来了电话让你取快递,这样一来就会耽误事。 |
STM32F103RC有12个独立的可配置的通道(请求):DMA1有7个通道,DMA2有5个通道
每个通道都直接连接专用的硬件DMA请求,每个通道都同样支持软件触发。这些功能通过 软件来配置。

这里,我们切换CUBEMX的USART1中,设置DMA,点击Add,把USART1_TX USART1_RX都添加进来。
注意,RX和TX下方的DMA Request Settings都需要设置为一样。
| Channel:通道 |
这里有个需要注意的地方,就是函数调用顺序
MX_DMA_Init()函数需要在其他初始化前调用,特别是在这个串口初始化前,不然会发送使用DMA发送会发送失败,在如下图位置配置调用顺序,必须先配置时钟再配置外设,MX_DMA_Init()里面有DMA时钟初始化
设置完成上面步骤,生成工程后,我们会发现DMA初始化在USART1之前,如果不进行这步设置,可能会出现发送失败的情况哦。
/* Initialize all configured peripherals */MX_GPIO_Init();MX_DMA_Init();MX_USART1_UART_Init();然后,我们可以使用DMA方式实现串口发送
main.cwhile (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 */uint8_t txbuf[]="Hello,world!";HAL_UART_Transmit_DMA(&huart1,txbuf,sizeof(txbuf));HAL_Delay(500); }/* USER CODE END 3 */也可以使用DMA方式实现串口收发
如果需要实时处理串口的数据,则需要打开串口全局中断。

UART一旦开启DMA之后,DMA通道全局中断都是强制开启的,DMA传输完整数据后,会触发HAL_UART_RxCpltCallback或HAL_UART_TxCpltCallback中断产生。
main.c/* USER CODE BEGIN 0 */uint8_t rxbuf[10];uint8_t ackbuf[] = "ack pack";/* USER CODE BEGIN 2 *///初始化DMA串口接收需要在串口初始化前?HAL_UART_Receive_DMA(&huart1,rxbuf,sizeof(rxbuf));/* USER CODE END 2 *//* USER CODE BEGIN 4 */
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart){ if(huart == &huart1) //判断中断是否来自于串口1{HAL_UART_Transmit_DMA(&huart1,ackbuf,sizeof(ackbuf)); //通过中断的方式发送应答数据出去//如果接收使用循环模式,则不用重新开启HAL_UART_Receive_DMA(&huart1,rxbuf,sizeof(rxbuf)); //开始接收下一轮数据}
}参考工程:参考飞书文档
使用USART+DMA接收中断不定长数据
可以使用STM32 IDLE空闲中断实现,IDLE的中断产生条件:在串口无数据接收的情况下,不会产生,当清除IDLE标志位后,必须有接收到第一个数据后,才开始触发,一但接收的数据断流,没有接收到数据,即产生IDLE中断
main.c
/* USER CODE BEGIN 0 */
extern DMA_HandleTypeDef hdma_usart1_rx;
#define BUFFER_SIZE 100
uint8_t rxbuf[BUFFER_SIZE];/* USER CODE BEGIN 2 */
__HAL_UART_ENABLE_IT(&huart1,UART_IT_IDLE);
HAL_UART_Receive_DMA(&huart1,rxbuf,sizeof(rxbuf));/* USER CODE BEGIN 4 */
void UART_IDLEHandler(){if(__HAL_UART_GET_FLAG(&huart1, UART_FLAG_IDLE) == SET) //如果串口处于空闲状态{__HAL_UART_CLEAR_FLAG(&huart1, UART_FLAG_IDLE);//清空空闲状态标志HAL_UART_DMAStop(&huart1); //关闭DMA传输//计算接收到的数据长度 ,已接收长度=需要接收总长度-剩余待接收长度uint8_t rlen = BUFFER_SIZE - __HAL_DMA_GET_COUNTER(&hdma_usart1_rx);//发送数据到上位机,当然,这里可以把数据复制到其它位置进行处理 HAL_UART_Transmit_DMA(&huart1,rxbuf,rlen);//重新打开DMA接收HAL_UART_Receive_DMA(&huart1,rxbuf,sizeof(rxbuf)); }
}main.h
/* USER CODE BEGIN EFP */
void UART_IDLEHandler(void);
/* USER CODE END EFP */stm32f1xx_it.c
/*** @brief This function handles USART1 global interrupt.*/
void USART1_IRQHandler(void)
{/* USER CODE BEGIN USART1_IRQn 0 *//* USER CODE END USART1_IRQn 0 */HAL_UART_IRQHandler(&huart1);/* USER CODE BEGIN USART1_IRQn 1 */UART_IDLEHandler();/* USER CODE END USART1_IRQn 1 */
}参考工程:参考飞书文档
端口复用
当然,USART1是支持复用功能的,可以重映像到其它IO上,如果我们在进行硬件设计时,发现PA9、PA10走线不好走,或者需要作为其它用途,我们可以把USART1映射到PB6 PB7,如何知道是否支持重映像,可以查看手册8.3章节。

可以在右侧的芯片图中找到PB6,设置为USART1_TX,PB7,设置为USART1_RX
串口重定向
在单片机中使用printf打印
使用HAL_UART_Transmit发送字符串很不方便,可以重定向printf()函数使printf通过串口打印字符串
| 使用串口重定向,必须勾选MicroLIB |
main.c
/* USER CODE BEGIN Includes */
#include <stdio.h>
/* USER CODE END Includes *//* USER CODE BEGIN 4 */
#ifdef __GNUC__
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE
{HAL_UART_Transmit(&huart1 , (uint8_t *)&ch, 1, 0xFFFF);return ch;
}