发那科机器人5(异常事件和程序备份加载+ROBOGUIDE离线仿真)
发那科机器人5(异常事件和程序备份加载+ROBOGUIDE离线仿真)
- 一,异常事件和程序备份加载
- 1,常见异常事件
- 2,零点复归介绍
- 3,程序备份-加载(未整理)
- 二,`ROBOGUIDE`离线仿真
- 1,仿真软件简介及安装步骤(未整理)
- 2,机器人==导入与工具==与==工件添加==
- 2.1,机器人导入(未整理)
- 2.2,工件的添加(未整理)
- 3,打开示教器及创建程序
一,异常事件和程序备份加载
1,常见异常事件
课程内容
常见异常事件
课程目标
掌握异常事件的处理方法
什么是机器人异常事件:
异常事件是指由于硬件设备问题和软件设计错误,而导致机器人无法运行的事件;
遇到异常事件而无法正常使用机器人时,如何处理这些异常事件,以保证机器人正常运行呢?
一般情况下,通过系统事件日志中报错编号查看事件类型,根据故障排除手册,找到相应的处理方式。
(故障1)不能接通电源
排除步骤:
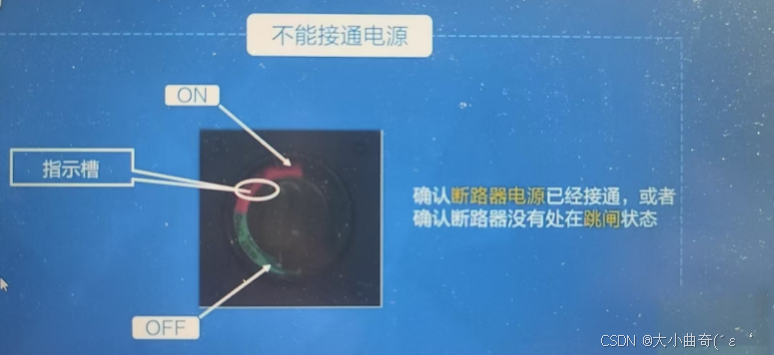
①,首先要确认断路器电源是否接通,或者是否处于跳闸的状态;
从上图中我们可以看出呢。这个断路器有一个指示槽,红色部分表示ON,绿色部分表示OFF。确认一下断路器是否拨到ON处,若没有,那就需要将其拨到ON;
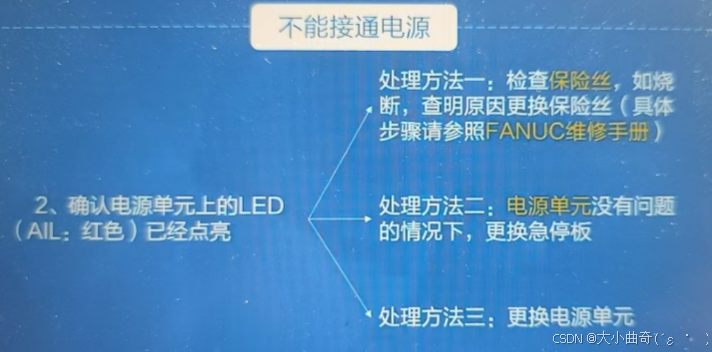
②,确认电源单元上的LED灯是否点亮,如果点亮,那就要检查一下保险丝,看保险丝是否烧断,若烧断,就需要更换保险丝;
更换新的保险丝之前,先要查找保险丝是什么原因导致它垄断的,找到相应问题之后,需要将其解决之后,才能够进行保险丝的更换。
③,若保险丝没有坏,那么有可能就需要更换急停板或者电源单元。
更换急停板或者电源单元的话,就说明这个故障已经是比较大的故障了;
(故障2)无法手动操作
无法手动操作,有哪几个原因呢?
①,能给机器人上电,但是无法操作机器人。首先需要观察试示教器的左上角有效开关是否打到ON(是否处于有效状态)。还有控制器上的模式开关,是否已经切换成手动模式;
若这两个都没有错误,那我们就看一下操作方式是否有错误;
(故障3)示教程序时不能执行程序
怎么处理呢?
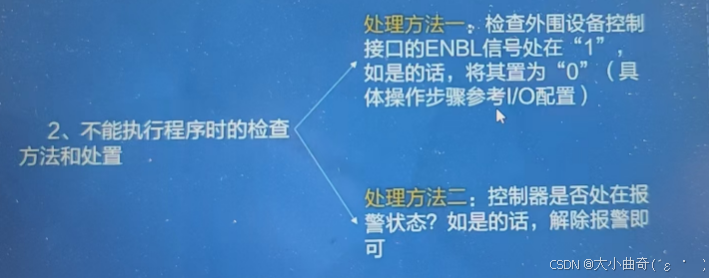
首先查看一下报警日志,看是什么原因导致不能执行程序。通常情况下,可以通过相应的提示,查找到对应的问题。
下面,例举了一些在日常操作中,经常遇到的一些常规报警代码:
| 报警代码 | 原因 | 解决办法 |
|---|---|---|
OS-001 | 软件内部错误 | 切断机器人控制装置的电源,尝试重新接通,得不到改善时,就需要联系一下FANUC技术支持,或者找专业人员进行相应调试。 |
SRVO-0001 | 操作面板的急停按钮被按下 | 首先解决急停面板的被按下的原因,查找至到报警原因后,再顺时针方向转动操作面板的急停按钮,解除报警后,按下RESET按钮 |
SRVO-002 | 示教器的急停按钮被按下 | 沿着顺时针,转动示教器的急停按钮,然后解除相应的报警,并按下RESET键,清除报警信号 |
SRVO-003 | 安全开关已释放或用力按下了安全开关 | 半按住示教器安全开关,然后再按下RESET键复位报警 |
SRVO-004 | 安全栅栏被打开 | 确认安全栅栏内有没有人,如果没有人,就要关闭安全栅栏,然后按下RESET键复位报警信号; |
SRVO-005 | 超出了机器人的关节和各个方向的硬件极限开关ÿ |