发那科机器人4(编程实例)
发那科机器人4(编程实例)
- 一、编程实例
- 1、直线运动实例
- 2、圆弧运动实例
- 3、曲线运动实例
- 4、物料搬运实例
- 5、异步输送带检测
一、编程实例
1、直线运动实例
本节内容:直线运动实例
本次实例,采用的是基础模块,以基础模块当中的四边形为例,演示一下机器人的直线运动。
编程前,首先需要完成一些编程前的准备工作:
①将基础模块安装在扇形板上,也就是工作台面上;
②将工具安装在机器人的法兰盘末端;
③将机器人控制器模式开关选择打到手动,也就是T1模式;
④建立相应的工具以及用户坐标系。
开始编程,
创建程序名
首先我们按一下select键,进入程序预览画面。按一下F2键,创建一个程序名(以直线的汉语拼音作为程序名),命名时,不能以数字开头;
程序的编辑
程序名称创建完成之后,按下enter键确认进入ZHIXIAN程序的编辑界面。
在准备工作时,已经建立了 用户坐标系1 以及 工具用坐标系1 ,在此直接调用即可;
坐标系选择指令书写
我们按下NEXT的键,切换功能键菜单,按下F1键指令,选择坐标系,选择用户坐标系选择指令,然后按一下常数,输入数字1。同样选择工具坐标系选择指令,然后按一下常数,输入数字1;1: UFRAME_NUM=1 2: UTOOL_NUM=1
再将机器人移动到一个安全位置,定义一个安全点,怎么定义呢?
走到相应的安全位置后,按下NEXT键切换功能键菜单,我们按下F1键点,选择关节动作指令P1 点。然后发现机器人当前位置已经被记录到P1点处。
然后机器人移动到一个合适的姿态,将机器人当前位置定义为P2点,也就是同样的
添加一个关节动作指令P2 点,并将当前位置保存在P2点处。
添加一个直线动作指令P3 点
移动机器人至正方形的正上方,(在做直线运动的时候,尽量不要改变机器人的姿态,也就是,要在世界坐标系或者所选择的用户坐标系下进行示教。)然后将机器人当前的位置保存到P3点处;
添加一个直线动作指令P4 点
然后移动机器人至正方形轨迹点处第一点,将机器人当前位置记录到P4点。
注:点击
F1点后,这里面的一个标准动作只有四条指令,若需要用到其他指令怎么办?
按下F1对应标准
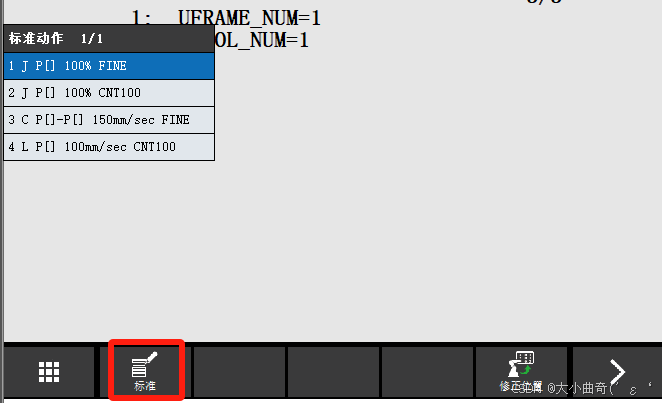
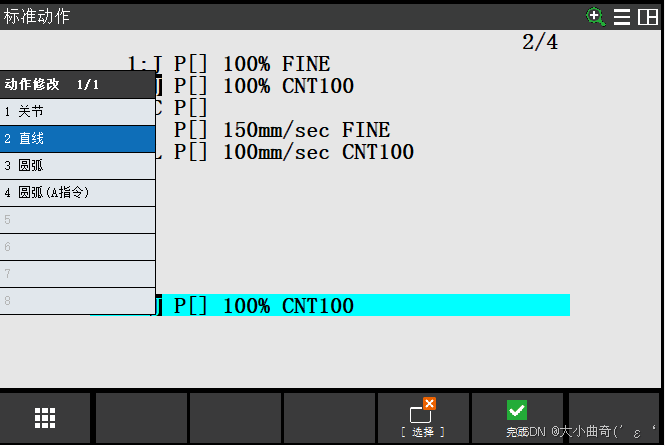
进入则可任意修改我们所需要的指令,这里面四个呢,主要是一个快捷方式,相当于我们一些常用的指令,若在编程的时候,发现圆弧指令使用较多,或者关节运动指令的50%的速度用的比较多。那就可以在里面修改;我们移动到下图第二行J处,然后点击
F4选择,可选择关节运动、直线、圆弧、C圆弧之类。
编辑完成之后,就可以点击F5完成
添加一个直线动作指令P5 点
再移动机器人至正方形的第二点。然后将机器人当前的位置记录到P5点处。
添加一个直线动作指令P6 点
再次移动机器人到正方形的第三个点。然后将机器人当前位置记录到P6点
添加一个直线动作指令P7 点
再次移动机器人到正方形的第四个点。然后将机器人当前位置记录到P7点
添加一个直线动作指令P8 点
为了构成一个完整的一个路径,需要再定义一个点。然后将里面的位置变量修改为正方形的第一个点;
这样呢,就构成了一个完整的正方形轨迹;
添加一个直线动作指令P2 点
再给它返回的时候,给它一个安全点。让它移动到P2点处即可。
这样呢,我们的整个直线运动实例的路径规划,就已完成。
完整程序如下
1: UFRAME_NUM=12: UTOOL_NUM=13: J P[1] 20% FINE4: J P[2] 20% FINE5: L P[3] 150mm/sec FINE6: L P[4] 150mm/sec FINE7: L P[5] 150mm/sec FINE8: L P[6] 150mm/sec FINE9: L P[7] 150mm/sec FINE 10: L P[4] 150mm/sec FINE 11: J P[2] 20% FINE
下面给大家演示一下,还有一个完整的一个动作流程,
在执行程序时,先选择单步执行,因为刚示教完的程序不能保证百分百的正确率,因此要单步执行,对每一个示教的点位进行相应的验证一下。
若发现整个程序运行下来没有任何问题,
则切换至连续运行,连续运行一下,看一下有没有问题;
2、圆弧运动实例
本节讲解圆弧运动实例的操作步骤。
本实例使用的是基础模块,以模块当中的圆形为例,演示机器人的一个圆弧动作;
在编程前呢,需要有一个准备工作。
准备工作完成后,进入编程界面,按下select键进入程序预览画面。
按下F2创建一个程序名称。就以圆弧的这个汉语拼音为例,创建一个程序名称;
创建完成之后,按下回车键,确认进入YUANHU程序的编辑界面;
首先选择坐标系指令:
按下
next键切换功能键菜单,按下F1键对应指令选择坐标系。这里面呢,我们选择坐标系1,作为本次圆弧指令的一个坐标系。