复刻低成本机械臂 SO-ARM100 标定篇
视频讲解:
复刻低成本机械臂 SO-ARM100 标定篇
组装完机械臂后,要进行初始标定,参考github的markdown
lerobot/examples/10_use_so100.md at main · huggingface/lerobot
只有从臂,所以arms里面只填follower即可
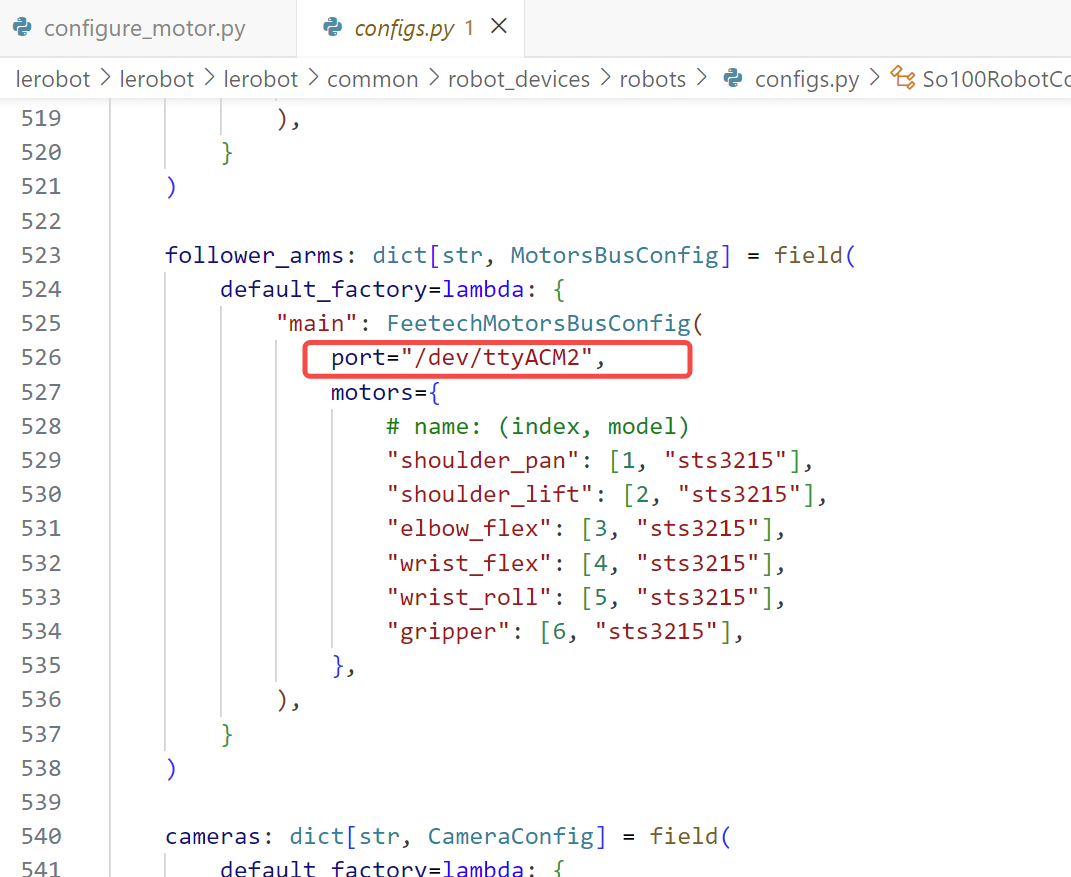
python lerobot/scripts/control_robot.py \--robot.type=so100 \--robot.cameras='{}' \--control.type=calibrate \--control.arms='["main_follower"]'直接运行一般会报错,因为configs.py中配置的串口是2和3,需要改成机器中的,比如ttyACM0

lerobot/lerobot/lerobot/common/robot_devices/robots/configs.py
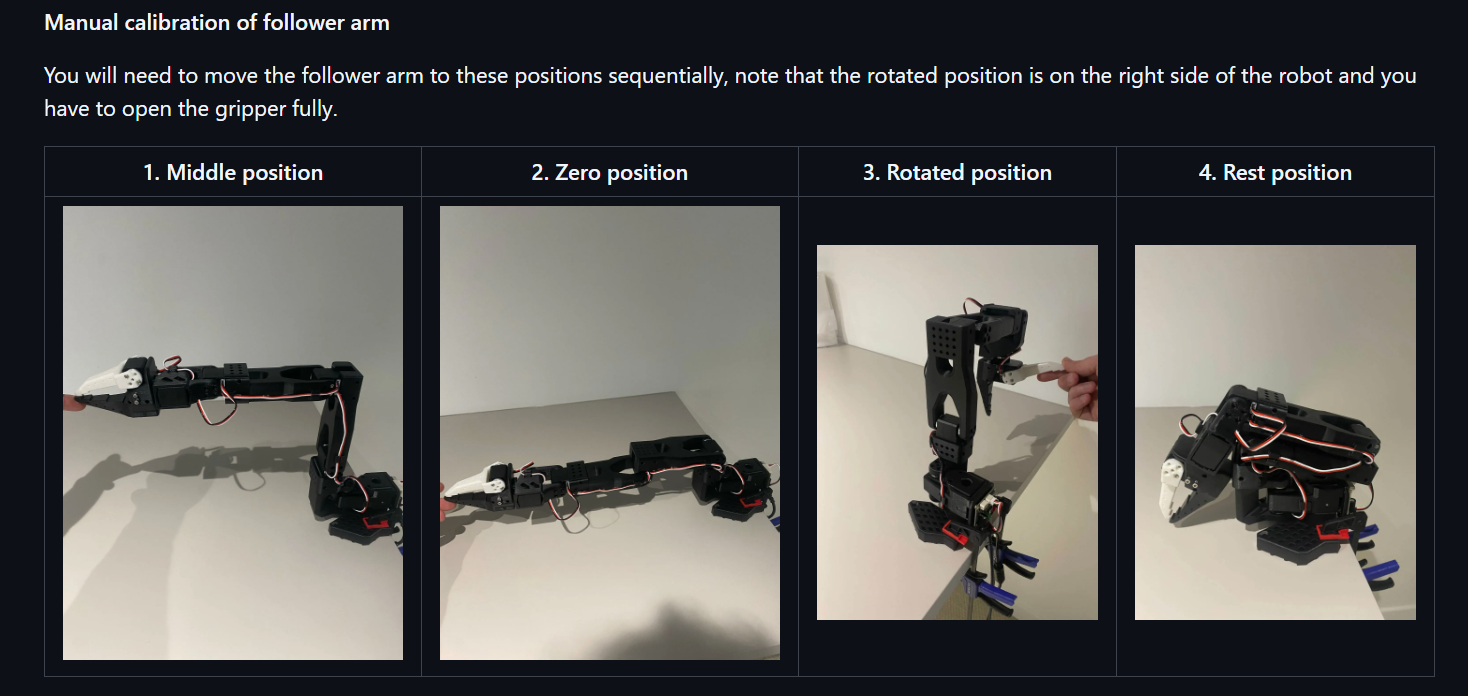
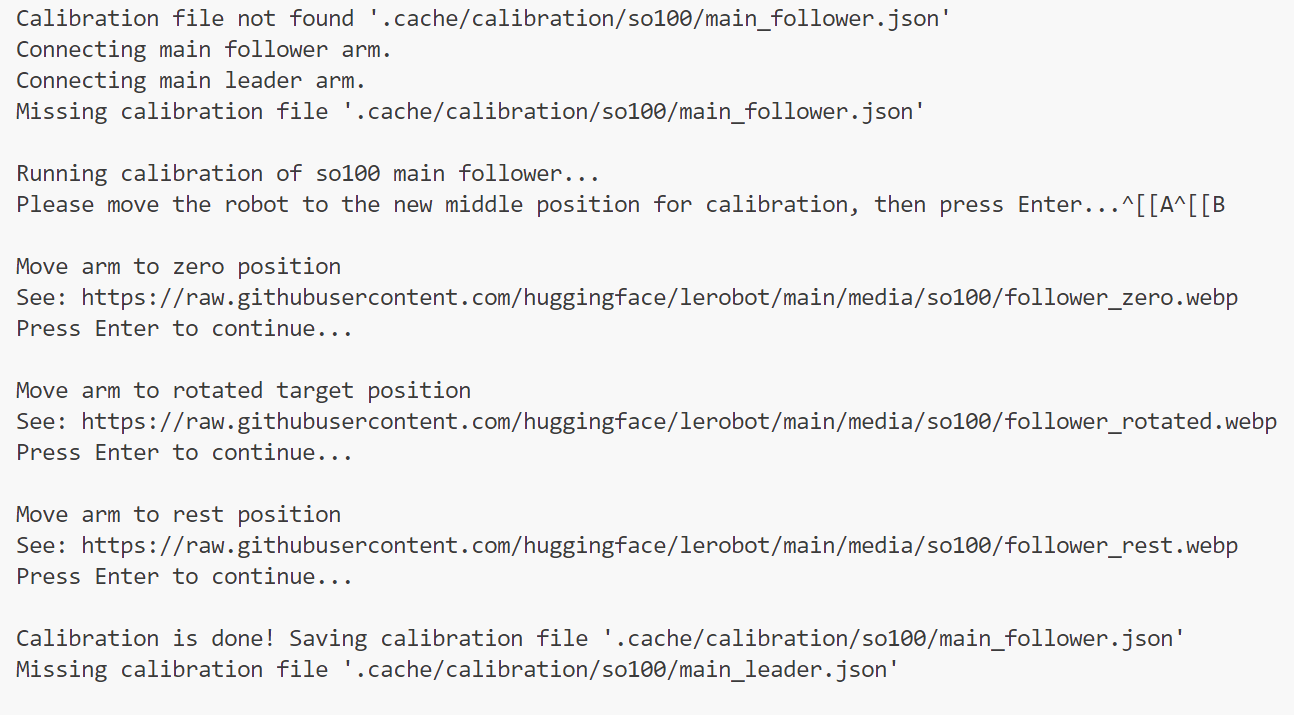
然后参考控制台输出的内容,按照图示将这些位置依次摆好,然后回车
最后标定完之后,会将标定数据保存在.cache/calibration/so100/main_follower.json
打开这个文件看下
