2025五一杯A题五一杯数学建模思路代码文章教学:支路车流量推测问题
完整内容请看文章最下面的推广群
通用假设与核心模型
主路车流量 = 支路1 + 支路2 + …
支路车流随时间变化是连续函数,且遵循题设描述的趋势(线性、分段、周期性等)
所有数据均为标准车当量数,忽略单位
时间点从 7:00 开始,每两分钟采样一次
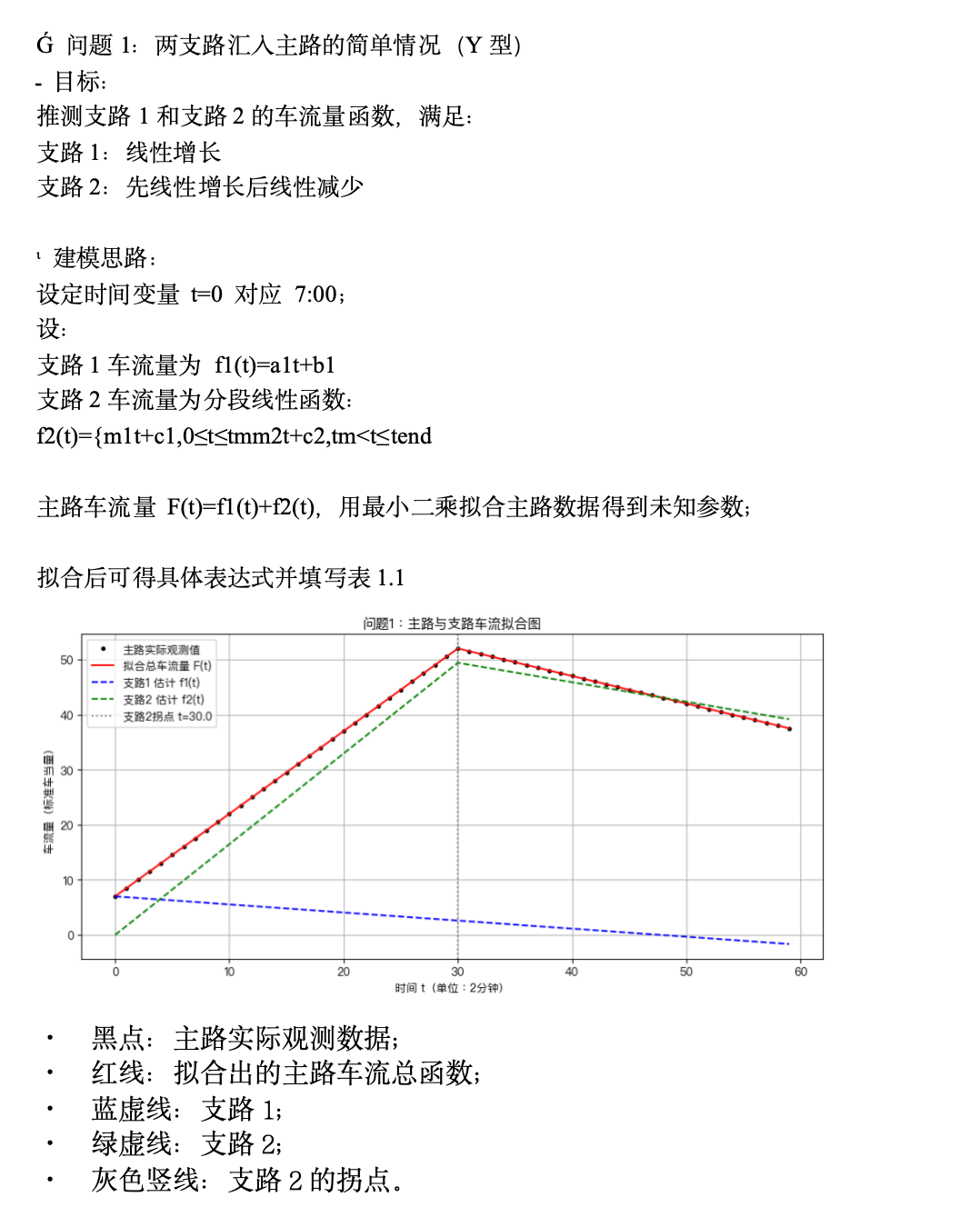
📘 问题1:两支路汇入主路的简单情况(Y型)
🎯 目标:
推测支路1和支路2的车流量函数,满足:
支路1:线性增长
支路2:先线性增长后线性减少
🧠 建模思路:
设定时间变量 t=0 对应 7:00;
设:
支路1车流量为 f1(t)=a1t+b1
支路2车流量为分段线性函数:
f2(t)={m1t+c1,0≤t≤tmm2t+c2,tm<t≤tend
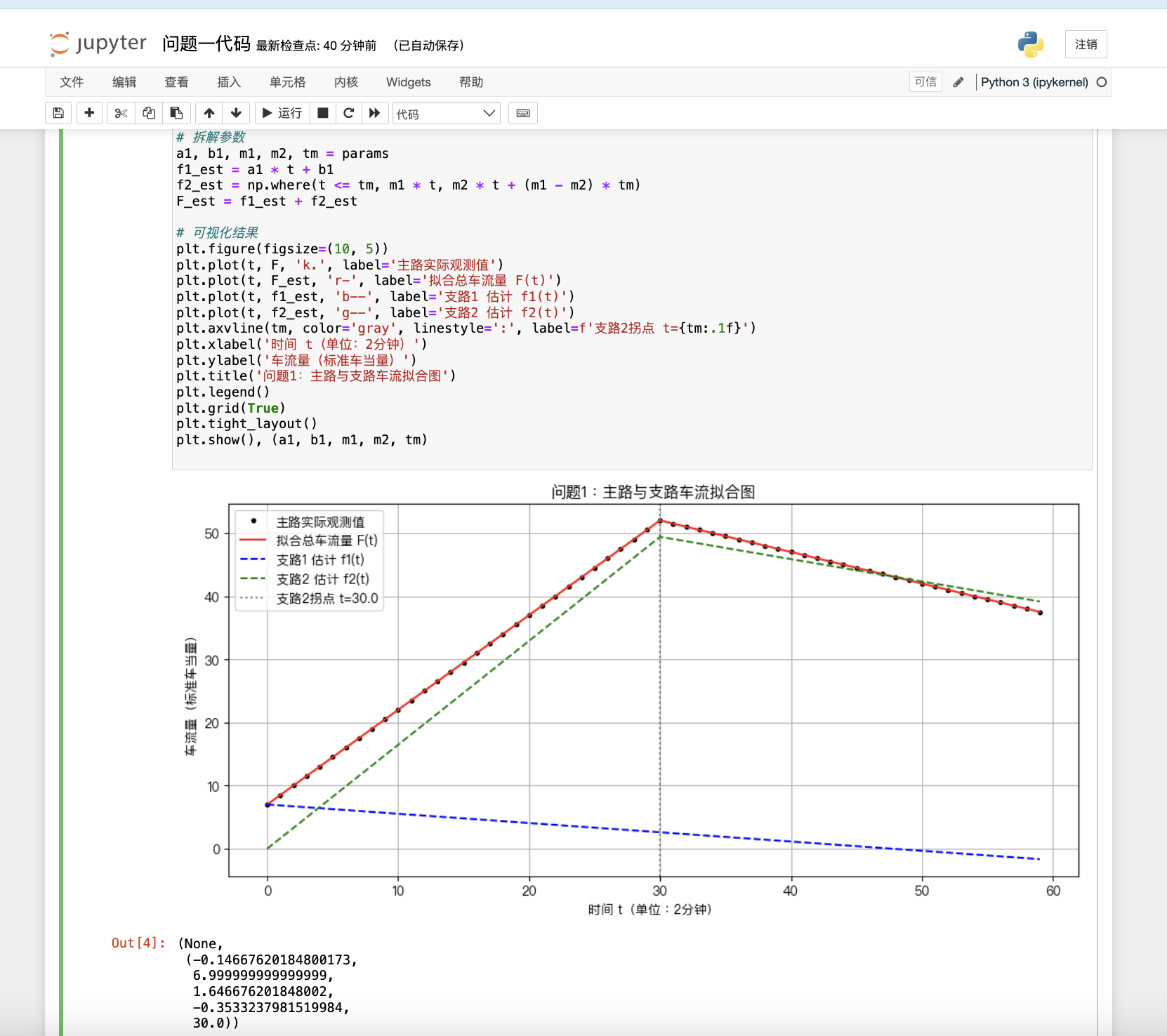
主路车流量 F(t)=f1(t)+f2(t),用最小二乘拟合主路数据得到未知参数;
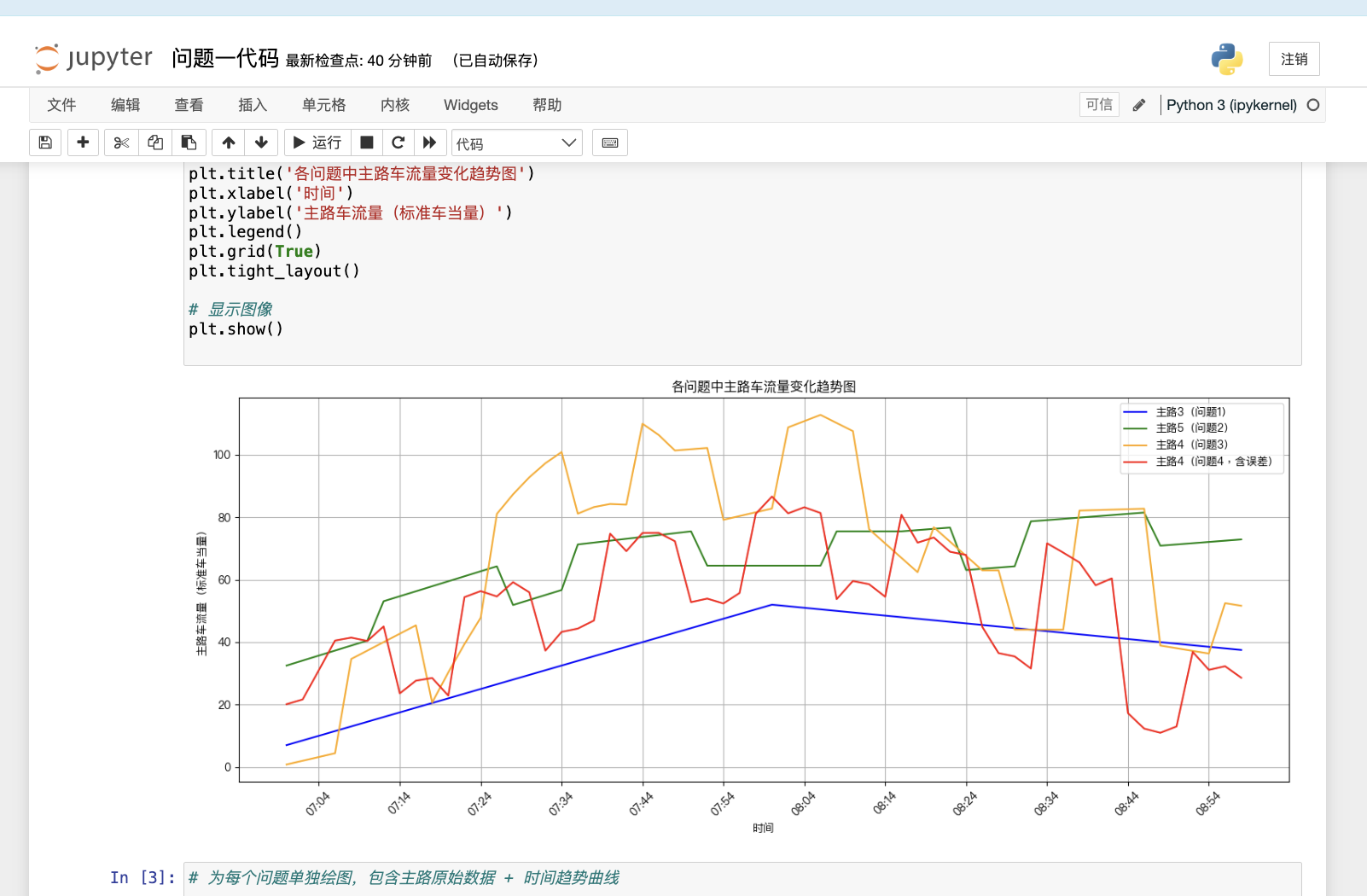
拟合后可得具体表达式并填写表1.1
· 黑点:主路实际观测数据;
· 红线:拟合出的主路车流总函数;
· 蓝虚线:支路1;
· 绿虚线:支路2;
· 灰色竖线:支路2的拐点。
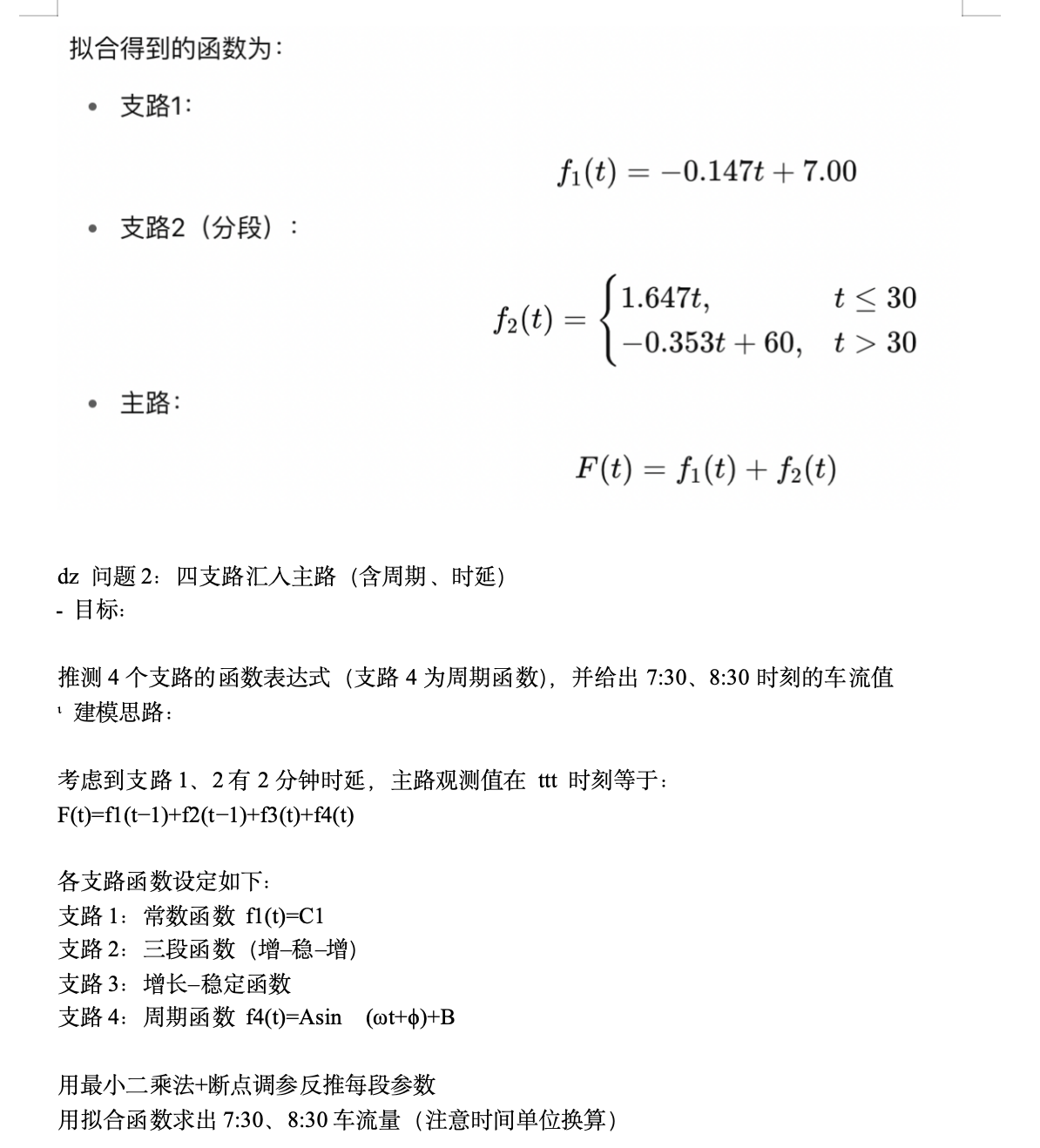
📗 问题2:四支路汇入主路(含周期、时延)
🎯 目标:
推测4个支路的函数表达式(支路4为周期函数),并给出7:30、8:30时刻的车流值
🧠 建模思路:
考虑到支路1、2有2分钟时延,主路观测值在 ttt 时刻等于:
F(t)=f1(t−1)+f2(t−1)+f3(t)+f4(t)
各支路函数设定如下:
支路1:常数函数 f1(t)=C1
支路2:三段函数(增–稳–增)
支路3:增长–稳定函数
支路4:周期函数 f4(t)=Asin(ωt+ϕ)+B
用最小二乘法+断点调参反推每段参数
用拟合函数求出7:30、8:30车流量(注意时间单位换算)
📙 问题3:三支路+信号灯控制
🎯 目标:
考虑信号灯影响,推测各支路车流函数,重点在支路3灯控建模
🧠 建模思路:
灯控规律:红8分钟,绿10分钟,黄忽略,绿灯从7:06开始
确定灯控周期:每18分钟重复,使用时间模18的余数判断红绿灯状态
设支路3车流函数:
f3(t)={0,tmod 18∈[0,8) (红灯)g(t),tmod 18∈[8,18) (绿灯,g可为常数/线性)
支路1和2:分别构造分段增长、稳定、减少趋势函数
套用延时关系后:F(t)=f1(t−1)+f2(t−1)+f3(t)
拟合后求出目标时刻车流值,并分析误差(如灯控边界带来的跳跃)
问题4:有误差观测数据 + 灯控未知
🎯 目标:
在主路车流数据存在误差、信号灯起点未知的情况下反推出各支路实际车流函数
🧠 建模思路:
仍用:F(t)=f1(t−1)+f2(t−1)+f3(t)+ϵ(t)
支路1、2趋势为已知(增稳减)
支路3灯控起始时间未知,需将绿灯起点视作参数 t0,尝试不同 t0 从6:58到7:18做滑窗拟合
拟合误差最小的灯控起点即为最优假设值
对比重构后的主路数据与原始数据,讨论误差来源(如传感器不稳定)
问题5:最少采样点推断支路函数
🎯 目标:
基于问题2和问题3的支路车流变化趋势,求最少观测主路流量所需的关键时间点集合
🧠 建模思路:
分析每条支路变化趋势的结构性:
线性函数:2点可定
分段线性函数:每段2点,段间1点断点
周期函数:至少1个周期的采样点(3个关键点即可拟正弦函数)
灯控函数:需覆盖红绿交界(至少每周期2~3点)
分析:
问题2中应在每段起止点选关键时刻(如 7:48、8:14 等
问题3中需覆盖所有灯控状态变化点,如 7:06, 7:16, 7:24…
汇总这些点作为最少采样点,填写表5.1