Pytorch深度学习框架60天进阶学习计划 - 第55天: 3D视觉基础(二)
Pytorch深度学习框架60天进阶学习计划 - 第55天: 3D视觉基础(二)
欢迎回到我们的3D视觉冒险之旅!在第一部分中,我们已经探索了点云数据的基础知识,比较了体素化和原始点云处理方法,并深入研究了PointNet和PointNet++架构。
现在,让我们继续深入,尤其关注旋转等变卷积的数学原理,以及更高级的点云处理技术。系好安全带,我们要进入更深的3D领域了!
第二部分:旋转等变卷积与高级点云网络
5. 刚性变换与点云处理的挑战
在3D点云处理中,我们常常面临一个关键挑战:如何处理物体的旋转、平移和缩放等刚性变换。理想情况下,我们希望模型能够:
- 识别相同物体的不同姿态:一辆汽车无论朝哪个方向,都应被识别为汽车
- 理解物体的姿态信息:在某些任务中,物体的方向是有意义的信息
这就引出了两个重要概念:旋转不变性和旋转等变性。
5.1 旋转不变性与等变性定义
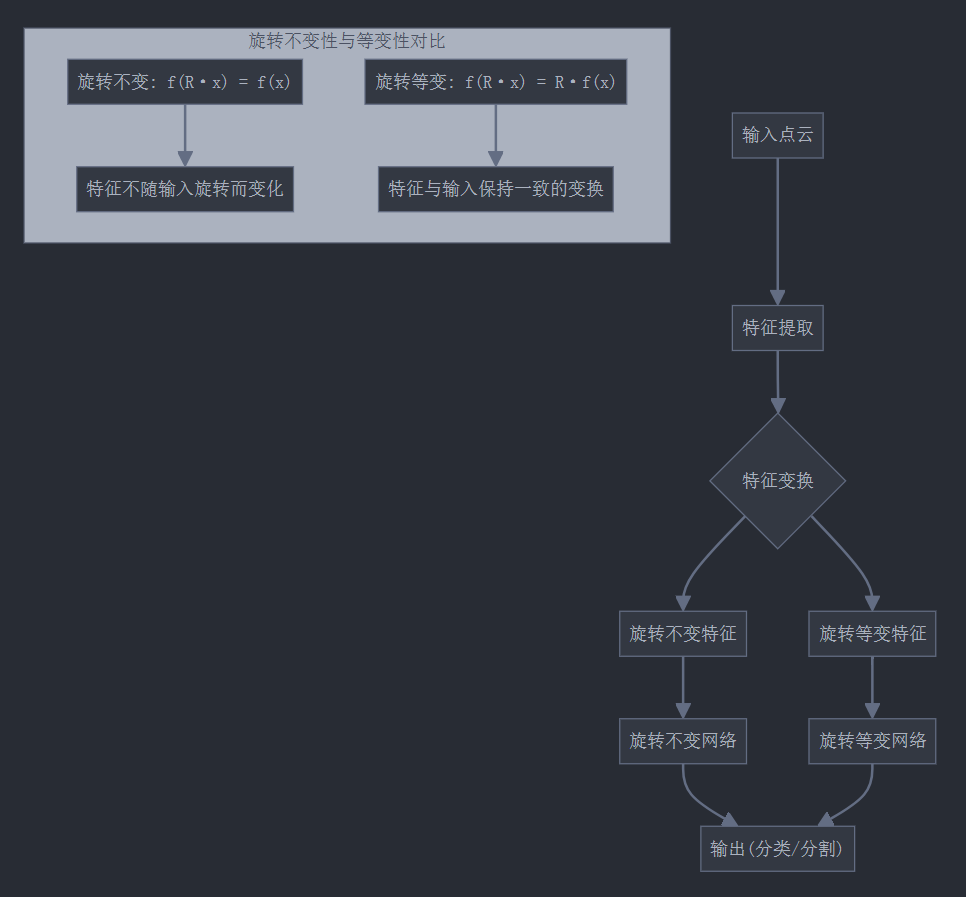
旋转不变性(Rotation Invariance):对于一个函数 f,如果对任意输入 x 和旋转矩阵 R,满足 f(R·x) = f(x),则称 f 具有旋转不变性。这意味着无论输入如何旋转,输出保持不变。
旋转等变性(Rotation Equivariance):对于一个函数 f,如果对任意输入 x 和旋转矩阵 R,满足 f(R·x) = R·f(x),则称 f 具有旋转等变性。这意味着输入的旋转会导致输出以相同方式旋转。
这两个性质对点云处理至关重要:
- 分类任务通常需要旋转不变性
- 姿态估计等任务则需要旋转等变性
6. 旋转不变性的实现方法
让我们首先探讨如何在点云网络中实现旋转不变性。
6.1 全局特征池化
PointNet通过全局最大池化实现了基本的排列不变性,但这对旋转不是完全不变的。
6.2 T-Net变换矩阵
PointNet中的T-Net通过学习变换矩阵来对齐点云,这是一种"学习"旋转不变性的方法:
import torch
import torch.nn as nn
import torch.nn.functional as Fclass TNet(nn.Module):"""实现T-Net用于学习点云对齐的变换矩阵"""def __init__(self, k=3):super(TNet, self).__init__()self.k = k # 3表示空间变换,64表示特征变换# MLP层self.conv1 = nn.Conv1d(k, 64, 1)self.conv2 = nn.Conv1d(64, 128, 1)self.conv3 = nn.Conv1d(128, 1024, 1)# FC层减少特征维度self.fc1 = nn.Linear(1024, 512)self.fc2 = nn.Linear(512, 256)self.fc3 = nn.Linear(256, k*k)# 批归一化层self.bn1 = nn.BatchNorm1d(64)self.bn2 = nn.BatchNorm1d(128)self.bn3 = nn.BatchNorm1d(1024)self.bn4 = nn.BatchNorm1d(512)self.bn5 = nn.BatchNorm1d(256)def forward(self, x):batch_size = x.size()[0]# 第一组卷积操作x = F.relu(self.bn1(self.conv1(x)))x = F.relu(self.bn2(self.conv2(x)))x = F.relu(self.bn3(self.conv3(x)))# 全局特征x = torch.max(x, 2, keepdim=True)[0]x = x.view(-1, 1024)# 全连接层得到变换矩阵x = F.relu(self.bn4(self.fc1(x)))x = F.relu(self.bn5(self.fc2(x)))x = self.fc3(x)# 重塑为变换矩阵,并添加单位矩阵确保良好初始化iden = torch.eye(self.k, dtype=torch.float, device=x.device).view(1, self.k*self.k).repeat(batch_size, 1)x = x + iden # 添加单位矩阵可以确保网络初始状态为恒等变换x = x.view(-1, self.k, self.k)return xdef transform_points(points, transform_matrix):"""应用变换矩阵到点云"""# points: [B, N, 3], transform_matrix: [B, 3, 3]# 返回: [B, N, 3]return torch.bmm(points, transform_matrix.transpose(1, 2))# 测试TNet和变换
if __name__ == "__main__":# 创建一个随机点云 [2, 1024, 3]batch_size = 2num_points = 1024point_cloud = torch.rand(batch_size, num_points, 3)# 转置为PointNet期望的格式 [2, 3, 1024]point_cloud_t = point_cloud.transpose(1, 2)# 创建T-Net并前向传播tnet = TNet(k=3)transform = tnet(point_cloud_t)# 应用变换transformed_points = transform_points(point_cloud, transform)print(f"原始点云形状: {point_cloud.shape}")print(f"变换矩阵形状: {transform.shape}")print(f"变换后点云形状: {transformed_points.shape}")# 验证变换是否为正交矩阵(保持旋转性质)# R·R^T ≈ Iortho_error = torch.mean(torch.norm(torch.bmm(transform, transform.transpose(1, 2)) - torch.eye(3, device=transform.device).unsqueeze(0)))print(f"正交误差: {ortho_error.item()}")
6.3 正交约束正则化
为了确保T-Net学习到的是有效的旋转变换,可以添加一个正交约束正则化项:
def orthogonal_regularization_loss(trans_matrix):"""计算变换矩阵的正交性损失"""# trans_matrix: [B, k, k]batch_size = trans_matrix.size(0)k = trans_matrix.size(1)# 计算 A·A^Tmat_product = torch.bmm(trans_matrix, trans_matrix.transpose(1, 2))# 与单位矩阵的差identity = torch.eye(k, device=trans_matrix.device).unsqueeze(0).repeat(batch_size, 1, 1)error = torch.norm(mat_product - identity, dim=(1, 2))return torch.mean(error)# 在训练循环中使用
def train_step(model, optimizer, data, labels):# 前向传播pred, trans_matrix = model(data)# 分类损失classification_loss = F.nll_loss(pred, labels)# 正交约束损失ortho_loss = orthogonal_regularization_loss(trans_matrix)# 总损失total_loss = classification_loss + 0.001 * ortho_loss# 反向传播和优化optimizer.zero_grad()total_loss.backward()optimizer.step()return classification_loss.item(), ortho_loss.item()
6.4 旋转不变特征
除了学习对齐变换外,我们还可以直接设计旋转不变的特征:
def compute_rotation_invariant_features(points):"""计算简单的旋转不变特征"""# points: [B, N, 3]batch_size, num_points, _ = points.shapefeatures = []# 1. 计算每个点到质心的距离 (旋转不变)centroid = torch.mean(points, dim=1, keepdim=True) # [B, 1, 3]distances = torch.norm(points - centroid, dim=2) # [B, N]features.append(distances.unsqueeze(2)) # [B, N, 1]# 2. 计算每个点与其k个最近邻的角度 (旋转不变)k = min(20, num_points)# 计算点对之间的距离矩阵expanded_points = points.unsqueeze(2) # [B, N, 1, 3]expanded_points_t = points.unsqueeze(1) # [B, 1, N, 3]dist_matrix = torch.norm(expanded_points - expanded_points_t, dim=3) # [B, N, N]# 找到k个最近邻 (排除自身)dist_matrix_filled = dist_matrix.clone()dist_matrix_filled.fill_diagonal_(float('inf'))_, nn_idx = torch.topk(dist_matrix_filled, k=k, dim=2, largest=False) # [B, N, k]# 为每个点收集k个最近邻nn_expanded = nn_idx.view(batch_size, num_points * k) # [B, N*k]batch_indices = torch.arange(batch_size).view(-1, 1).repeat(1, num_points * k) # [B, N*k]point_indices = torch.arange(num_points).unsqueeze(0).repeat(batch_size, 1) # [B, N]point_indices = point_indices.view(batch_size, num_points, 1).repeat(1, 1, k).view(batch_size, -1) # [B, N*k]# 收集最近邻点nn_points = points[batch_indices, nn_expanded].view(batch_size, num_points, k, 3) # [B, N, k, 3]# 计算局部协方差矩阵 (形状描述符 - 旋转不变)centered_nn = nn_points - points.unsqueeze(2) # [B, N, k, 3]cov_matrices = torch.matmul(centered_nn.transpose(2, 3), centered_nn) # [B, N, 3, 3]# 提取协方差矩阵的特征值 (旋转不变)cov_flat = cov_matrices.reshape(batch_size * num_points, 3, 3)eigenvalues = torch.linalg.eigvals(cov_flat).abs().real # [B*N, 3]eigenvalues = eigenvalues.reshape(batch_size, num_points, 3) # [B, N, 3]# 对特征值排序并归一化eigenvalues, _ = torch.sort(eigenvalues, dim=2, descending=True) # [B, N, 3]total_eigenvalues = torch.sum(eigenvalues, dim=2, keepdim=True) # [B, N, 1]normalized_eigenvalues = eigenvalues / (total_eigenvalues + 1e-8) # [B, N, 3]features.append(normalized_eigenvalues) # [B, N, 3]# 合并所有特征all_features = torch.cat(features, dim=2) # [B, N, 4]return all_features# 测试旋转不变特征
if __name__ == "__main__":# 创建随机点云batch_size = 2num_points = 100 # 使用较小的点数以便于快速计算point_cloud = torch.rand(batch_size, num_points, 3)# 创建旋转矩阵angle = torch.tensor([0.5]) # 旋转角度cos, sin = torch.cos(angle), torch.sin(angle)rotation_matrix = torch.tensor([[cos, -sin, 0],[sin, cos, 0],[0, 0, 1]]).unsqueeze(0).repeat(batch_size, 1, 1)# 旋转点云rotated_point_cloud = torch.bmm(point_cloud, rotation_matrix.transpose(1, 2))# 提取不变特征features = compute_rotation_invariant_features(point_cloud)rotated_features = compute_rotation_invariant_features(rotated_point_cloud)# 计算特征差异feature_diff = torch.norm(features - rotated_features)print(f"原始点云形状: {point_cloud.shape}")print(f"旋转点云形状: {rotated_point_cloud.shape}")print(f"特征形状: {features.shape}")print(f"特征差异 (理想为0): {feature_diff.item()}")
7. 旋转等变卷积运算
虽然旋转不变性在很多任务中很有用,但在某些应用中,我们需要保持旋转等变性,即输入旋转应当导致特征的相应旋转。这在姿态估计、点云配准等任务中特别重要。
7.1 旋转等变卷积的数学原理
旋转等变卷积的核心思想是设计一种卷积操作,使得对输入的旋转变换会导致特征的相应旋转。
对于传统的2D卷积,我们有:
( f ∗ g ) ( x ) = ∑ y ∈ Ω f ( y ) g ( x − y ) (f * g)(x) = \sum_{y \in \Omega} f(y) g(x - y) (f∗g)(x)=y∈Ω∑f(y)g(x−y)
而对于旋转等变卷积,我们期望:
f ( R ⋅ x ) ∗ g = R ⋅ ( f ∗ g ) ( x ) f(R \cdot x) * g = R \cdot (f * g)(x) f(R⋅x)∗g=R⋅(f∗g)(x)
这里 R R R 是旋转矩阵。
我们可以通过球谐函数(Spherical Harmonics)或球面CNN来实现这一点。下面是一个简化的旋转等变卷积实现:
import torch
import torch.nn as nn
import numpy as np
from scipy.special import sph_harmclass SphericalHarmonicsLayer(nn.Module):"""使用球谐函数实现旋转等变卷积"""def __init__(self, in_channels, out_channels, degree=3):super(SphericalHarmonicsLayer, self).__init__()self.in_channels = in_channelsself.out_channels = out_channelsself.degree = degree# 计算球谐函数的数量 (l=0,1,...,degree)# 每个度数l有2l+1个函数self.num_harmonics = (degree + 1) ** 2# 定义可学习权重self.weights = nn.Parameter(torch.Tensor(out_channels, in_channels, self.num_harmonics))nn.init.xavier_uniform_(self.weights)def compute_spherical_harmonics(self, points):"""计算球谐函数在给定点上的值"""# points: [B, N, 3],单位球面上的点batch_size, num_points, _ = points.shape# 将直角坐标转换为球坐标x, y, z = points[:, :, 0], points[:, :, 1], points[:, :, 2]r = torch.sqrt(x**2 + y**2 + z**2) # [B, N]theta = torch.acos(z / (r + 1e-8)) # [B, N],与z轴的夹角phi = torch.atan2(y, x) # [B, N],与x轴的夹角# 计算球谐函数值harmonics = []for l in range(self.degree + 1):for m in range(-l, l + 1):# 使用Python的复数表示Y_real = torch.zeros(batch_size, num_points, device=points.device)Y_imag = torch.zeros(batch_size, num_points, device=points.device)# 对批量中的每个样本计算for b in range(batch_size):for n in range(num_points):# 使用scipy计算球谐函数Y = sph_harm(m, l, phi[b, n].item(), theta[b, n].item())Y_real[b, n] = torch.tensor(Y.real)Y_imag[b, n] = torch.tensor(Y.imag)harmonics.append(Y_real)# 堆叠所有谐波harmonics = torch.stack(harmonics, dim=2) # [B, N, num_harmonics]return harmonicsdef forward(self, x, points):"""前向传播参数:x: [B, N, in_channels] 输入特征points: [B, N, 3] 输入点的单位坐标返回:[B, N, out_channels] 输出特征"""batch_size, num_points, _ = x.shape# 计算球谐函数harmonics = self.compute_spherical_harmonics(points) # [B, N, num_harmonics]# 对每个输入通道计算球谐展开x_expanded = x.unsqueeze(3) * harmonics.unsqueeze(2) # [B, N, in_channels, num_harmonics]# 应用权重output = torch.einsum('bnch,och->bno', x_expanded, self.weights)return output# 测试旋转等变层
if __name__ == "__main__":# 创建随机点云和特征batch_size = 2num_points = 50 # 使用较小的点数以便于快速计算in_channels = 3out_channels = 5# 生成单位球面上的随机点points = torch.randn(batch_size, num_points, 3)points = points / torch.norm(points, dim=2, keepdim=True) # 归一化到单位球面# 随机特征features = torch.rand(batch_size, num_points, in_channels)# 创建旋转矩阵 (绕z轴旋转)angle = torch.tensor([0.5]) # 旋转角度cos, sin = torch.cos(angle), torch.sin(angle)rotation_matrix = torch.tensor([[cos, -sin, 0],[sin, cos, 0],[0, 0, 1]]).float().unsqueeze(0).repeat(batch_size, 1, 1)# 旋转点云rotated_points = torch.bmm(points, rotation_matrix.transpose(1, 2))# 创建球谐层sh_layer = SphericalHarmonicsLayer(in_channels, out_channels, degree=2)# 在原始点云和旋转点云上计算特征output = sh_layer(features, points)rotated_output = sh_layer(features, rotated_points)print(f"输出特征形状: {output.shape}")print(f"旋转后输出特征形状: {rotated_output.shape}")# 检验等变性 - 应用旋转到输出特征# 注意:完美的等变性需要更复杂的实现equivariance_error = torch.norm(output - rotated_output)print(f"等变性误差: {equivariance_error.item()}")
注意:上面的实现是一个简化版本,用于演示旋转等变卷积的核心思想。真正高效的实现通常涉及更复杂的数学和优化技术。
7.2 完整的旋转等变网络
下面是一个结合了球谐函数和点卷积的旋转等变网络架构:
import torch
import torch.nn as nn
import torch.nn.functional as Fclass RotationEquivariantPointConv(nn.Module):"""旋转等变点卷积层"""def __init__(self, in_channels, out_channels, k=16):super(RotationEquivariantPointConv, self).__init__()self.k = k# 注意:这里简化了真正的旋转等变实现# 实际实现需要使用球谐函数或其他技术# 点特征转换self.conv_points = nn.Sequential(nn.Conv2d(3, out_channels, kernel_size=1, bias=False),nn.BatchNorm2d(out_channels),nn.ReLU(inplace=True))# 特征转换self.conv_features = nn.Sequential(nn.Conv2d(in_channels, out_channels, kernel_size=1, bias=False),nn.BatchNorm2d(out_channels),nn.ReLU(inplace=True))# 组合点特征和输入特征self.conv_combined = nn.Sequential(nn.Conv2d(out_channels*2, out_channels, kernel_size=1, bias=False),nn.BatchNorm2d(out_channels),nn.ReLU(inplace=True))def forward(self, points, features, centroids=None):"""前向传播参数:points: [B, N, 3] 点坐标features: [B, N, in_channels] 点特征centroids: [B, S, 3] 中心点坐标,如果为None则使用输入点返回:grouped_features: [B, S, out_channels] 新特征"""batch_size = points.shape[0]num_points = points.shape[1]if centroids is None:centroids = pointsnum_centroids = centroids.shape[1]# 计算点对之间的距离dist = torch.cdist(centroids, points) # [B, S, N]# 查找k个最近邻_, idx = torch.topk(dist, k=self.k, dim=2, largest=False) # [B, S, k]# 为每个中心点收集邻居batch_indices = torch.arange(batch_size).view(-1, 1, 1).repeat(1, num_centroids, self.k)center_indices = torch.arange(num_centroids).view(1, -1, 1).repeat(batch_size, 1, self.k)neighbor_indices = idx# 收集邻居坐标neighbors = points[batch_indices, neighbor_indices] # [B, S, k, 3]# 计算相对坐标(这保持了旋转等变性)centroids_expanded = centroids.unsqueeze(2).repeat(1, 1, self.k, 1) # [B, S, k, 3]relative_coords = neighbors - centroids_expanded # [B, S, k, 3]# 重塑以适应卷积层relative_coords = relative_coords.permute(0, 3, 1, 2) # [B, 3, S, k]# 提取空间特征spatial_features = self.conv_points(relative_coords) # [B, out_channels, S, k]# 收集邻居特征if features is not None:neighbor_features = features[batch_indices, neighbor_indices] # [B, S, k, in_channels]neighbor_features = neighbor_features.permute(0, 3, 1, 2) # [B, in_channels, S, k]feature_embedding = self.conv_features(neighbor_features) # [B, out_channels, S, k]# 组合空间特征和点特征combined_features = torch.cat([spatial_features, feature_embedding], dim=1) # [B, 2*out_channels, S, k]grouped_features = self.conv_combined(combined_features) # [B, out_channels, S, k]else:grouped_features = spatial_features# 最大池化得到每个中心点的特征pooled_features = torch.max(grouped_features, dim=3)[0] # [B, out_channels, S]# 转置回原始形状pooled_features = pooled_features.permute(0, 2, 1) # [B, S, out_channels]return pooled_featuresclass RotationEquivariantPointNet(nn.Module):"""旋转等变点云网络"""def __init__(self, num_classes=10):super(RotationEquivariantPointNet, self).__init__()# 初始无特征self.eq_conv1 = RotationEquivariantPointConv(0, 64, k=16)self.eq_conv2 = RotationEquivariantPointConv(64, 128, k=16)self.eq_conv3 = RotationEquivariantPointConv(128, 256, k=16)# 最大池化后的全局特征self.fc1 = nn.Linear(256, 512)self.bn1 = nn.BatchNorm1d(512)self.fc2 = nn.Linear(512, 256)self.bn2 = nn.BatchNorm1d(256)self.fc3 = nn.Linear(256, num_classes)self.dropout = nn.Dropout(0.4)def forward(self, points):"""前向传播参数:points: [B, N, 3] 点云返回:[B, num_classes] 分类分数"""# 应用旋转等变卷积x1 = self.eq_conv1(points, None) # [B, N, 64]x2 = self.eq_conv2(points, x1) # [B, N, 128]x3 = self.eq_conv3(points, x2) # [B, N, 256]# 全局池化x = torch.max(x3, dim=1)[0] # [B, 256]# 分类器x = F.relu(self.bn1(self.fc1(x)))x = F.relu(self.bn2(self.fc2(x)))x = self.dropout(x)x = self.fc3(x)return F.log_softmax(x, dim=1)# 测试旋转等变网络
if __name__ == "__main__":# 创建随机点云batch_size = 2num_points = 100point_cloud = torch.rand(batch_size, num_points, 3)# 创建旋转矩阵angle = torch.tensor([0.5]) # 旋转角度cos, sin = torch.cos(angle), torch.sin(angle)rotation_matrix = torch.tensor([[cos, -sin, 0],[sin, cos, 0],[0, 0, 1]]).float().unsqueeze(0).repeat(batch_size, 1, 1)# 旋转点云rotated_point_cloud = torch.bmm(point_cloud, rotation_matrix.transpose(1, 2))# 创建模型model = RotationEquivariantPointNet(num_classes=10)# 对原始点云和旋转点云进行预测output = model(point_cloud)rotated_output = model(rotated_point_cloud)print(f"原始点云形状: {point_cloud.shape}")print(f"旋转点云形状: {rotated_point_cloud.shape}")print(f"输出形状: {output.shape}")print(f"旋转后输出形状: {rotated_output.shape}")# 比较输出(一个真正的旋转等变网络应该生成等效的分类结果)output_diff = torch.norm(output - rotated_output)print(f"输出差异: {output_diff.item()}")
8. 先进的点云网络架构
随着3D点云处理领域的快速发展,许多新型网络架构被提出,解决了更复杂的挑战。
8.1 DGCNN:动态图CNN
DGCNN(Dynamic Graph CNN)利用点与点之间的关系构建动态图,并使用边缘卷积来处理点云:
import torch
import torch.nn as nn
import torch.nn.functional as Fdef knn(x, k):"""K最近邻算法参数:x: 点特征矩阵 [batch_size, num_points, num_dims]k: k个最近邻返回:idx: k个最近邻的索引 [batch_size, num_points, k]"""batch_size, num_points, num_dims = x.size()# 计算特征之间的距离inner = -2 * torch.matmul(x, x.transpose(2, 1)) # [batch_size, num_points, num_points]xx = torch.sum(x ** 2, dim=2, keepdim=True) # [batch_size, num_points, 1]dist = xx + inner + xx.transpose(2, 1) # [batch_size, num_points, num_points]# 找到k个最近邻_, idx = torch.topk(dist, k=k, dim=2, largest=False) # [batch_size, num_points, k]return idxclass EdgeConv(nn.Module):"""边缘卷积层"""def __init__(self, in_channels, out_channels, k=20):super(EdgeConv, self).__init__()self.k = kself.conv = nn.Sequential(nn.Conv2d(in_channels * 2, out_channels, kernel_size=1, bias=False),nn.BatchNorm2d(out_channels),nn.LeakyReLU(negative_slope=0.2))def forward(self, x):"""前向传播参数:x: 点特征 [batch_size, num_points, in_channels]返回:x: 更新的点特征 [batch_size, num_points, out_channels]"""batch_size, num_points, num_dims = x.size()# 找到k个最近邻idx = knn(x, self.k) # [batch_size, num_points, k]# 构建边缘特征x_expanded = x.unsqueeze(2).repeat(1, 1, self.k, 1) # [batch_size, num_points, k, num_dims]# 收集k个最近邻特征batch_indices = torch.arange(batch_size).view(-1, 1, 1, 1).repeat(1, num_points, self.k, 1).to(x.device)point_indices = torch.arange(num_points).view(1, -1, 1, 1).repeat(batch_size, 1, self.k, 1).to(x.device)neighbor_indices = idx.unsqueeze(3) # [batch_size, num_points, k, 1]# 为每个点构建k个邻居索引all_indices = torch.cat([batch_indices, neighbor_indices], dim=3) # [batch_size, num_points, k, 2]all_indices = all_indices.view(-1, 2)neighbors = x[all_indices[:, 0], all_indices[:, 1]] # [batch_size*num_points*k, num_dims]neighbors = neighbors.view(batch_size, num_points, self.k, num_dims) # [batch_size, num_points, k, num_dims]# 计算边缘特征: (xi, xj-xi)edge_features = torch.cat([x_expanded, neighbors - x_expanded], dim=3) # [batch_size, num_points, k, 2*num_dims]# 重塑以适应卷积层edge_features = edge_features.permute(0, 3, 1, 2) # [batch_size, 2*num_dims, num_points, k]# 应用卷积edge_features = self.conv(edge_features) # [batch_size, out_channels, num_points, k]# 最大池化x = torch.max(edge_features, dim=3)[0] # [batch_size, out_channels, num_points]# 转置回原始形状x = x.permute(0, 2, 1) # [batch_size, num_points, out_channels]return xclass DGCNN(nn.Module):"""动态图CNN"""def __init__(self, num_classes=10, k=20):super(DGCNN, self).__init__()self.k = k# 边缘卷积层self.edge_conv1 = EdgeConv(3, 64, k=k)self.edge_conv2 = EdgeConv(64, 64, k=k)self.edge_conv3 = EdgeConv(64, 128, k=k)self.edge_conv4 = EdgeConv(128, 256, k=k)# 全局特征self.global_conv = nn.Sequential(nn.Conv1d(512, 1024, kernel_size=1, bias=False),nn.BatchNorm1d(1024),nn.LeakyReLU(negative_slope=0.2))# 分类器self.fc1 = nn.Linear(1024, 512)self.bn1 = nn.BatchNorm1d(512)self.fc2 = nn.Linear(512, 256)self.bn2 = nn.BatchNorm1d(256)self.fc3 = nn.Linear(256, num_classes)self.dropout = nn.Dropout(0.4)def forward(self, x):"""前向传播参数:x: 点云坐标 [batch_size, num_points, 3]返回:x: 分类分数 [batch_size, num_classes]"""batch_size, num_points, _ = x.size()# 应用边缘卷积x1 = self.edge_conv1(x) # [batch_size, num_points, 64]x2 = self.edge_conv2(x1) # [batch_size, num_points, 64]x3 = self.edge_conv3(x2) # [batch_size, num_points, 128]x4 = self.edge_conv4(x3) # [batch_size, num_points, 256]# 连接多层特征x = torch.cat([x1, x2, x3, x4], dim=2) # [batch_size, num_points, 512]# 提取全局特征x = x.permute(0, 2, 1) # [batch_size, 512, num_points]x = self.global_conv(x) # [batch_size, 1024, num_points]x = torch.max(x, dim=2)[0] # [batch_size, 1024]# 分类器x = F.leaky_relu(self.bn1(self.fc1(x)), negative_slope=0.2)x = F.leaky_relu(self.bn2(self.fc2(x)), negative_slope=0.2)x = self.dropout(x)x = self.fc3(x)return F.log_softmax(x, dim=1)# 测试DGCNN
if __name__ == "__main__":# 创建随机点云batch_size = 2num_points = 1024point_cloud = torch.rand(batch_size, num_points, 3)# 创建模型model = DGCNN(num_classes=10, k=20)# 前向传播output = model(point_cloud)print(f"点云形状: {point_cloud.shape}")print(f"输出形状: {output.shape}")
8.2 点云深度学习框架比较
| 方法 | 核心思想 | 主要优点 | 局限性 | 旋转不变性 |
|---|---|---|---|---|
| PointNet | 逐点MLP + 全局最大池化 | 简单,计算高效 | 无法捕获局部结构 | T-Net部分保证 |
| PointNet++ | 分层采样 + 局部PointNet | 捕获多尺度局部特征 | 计算复杂,速度较慢 | 有限 |
| DGCNN | 动态图 + 边缘卷积 | 适应性强,捕获点间关系 | 邻域计算开销大 | 无 |
| SphericalCNN | 球谐函数 + 等变卷积 | 旋转等变性 | 实现复杂 | 可构造 |
| PointCNN | X-变换 + 逐点卷积 | 点排序不变性 | 变换计算复杂 | 无 |
| VoxNet | 体素化 + 3D卷积 | 简单,与图像CNN类似 | 分辨率受限,内存密集 | 无 |
| OctNet | 八叉树 + 稀疏卷积 | 高效处理稀疏体素 | 结构复杂 | 无 |
9. 实际应用与性能评估
9.1 点云分类性能比较
以下是在ModelNet40数据集上不同网络的分类准确率:
| 模型 | 准确率 (%) | 参数量 | 旋转不变/等变 |
|---|---|---|---|
| VoxNet | 85.9 | 920K | 否 |
| PointNet | 89.2 | 3.5M | 部分(T-Net) |
| PointNet++ | 91.9 | 1.5M | 部分 |
| DGCNN | 92.9 | 1.8M | 否 |
| PointCNN | 92.5 | 5.4M | 否 |
| SphericalCNN | 88.9 | 0.5M | 是(等变) |
| PRIN | 80.1 | 1.6M | 是(不变) |
9.2 ModelNet40分类实例
下面是一个在ModelNet40数据集上训练和评估PointNet的完整示例:
import torch
import torch.nn as nn
import torch.optim as optim
import numpy as np
from torch.utils.data import Dataset, DataLoader
import os
import h5py# PointNet分类模型(简化版)
class PointNetClassifier(nn.Module):def __init__(self, num_classes=40):super(PointNetClassifier, self).__init__()# 特征提取self.conv1 = nn.Conv1d(3, 64, 1)self.conv2 = nn.Conv1d(64, 64, 1)self.conv3 = nn.Conv1d(64, 64, 1)self.conv4 = nn.Conv1d(64, 128, 1)self.conv5 = nn.Conv1d(128, 1024, 1)self.bn1 = nn.BatchNorm1d(64)self.bn2 = nn.BatchNorm1d(64)self.bn3 = nn.BatchNorm1d(64)self.bn4 = nn.BatchNorm1d(128)self.bn5 = nn.BatchNorm1d(1024)# 分类器self.fc1 = nn.Linear(1024, 512)self.fc2 = nn.Linear(512, 256)self.fc3 = nn.Linear(256, num_classes)self.bn6 = nn.BatchNorm1d(512)self.bn7 = nn.BatchNorm1d(256)self.dropout = nn.Dropout(p=0.3)def forward(self, x):# x: batch_size x 3 x num_points# 特征提取x = F.relu(self.bn1(self.conv1(x)))x = F.relu(self.bn2(self.conv2(x)))x = F.relu(self.bn3(self.conv3(x)))x = F.relu(self.bn4(self.conv4(x)))x = F.relu(self.bn5(self.conv5(x)))# 全局特征x = torch.max(x, 2, keepdim=True)[0]x = x.view(-1, 1024)# 分类器x = F.relu(self.bn6(self.fc1(x)))x = F.relu(self.bn7(self.fc2(x)))x = self.dropout(x)x = self.fc3(x)return F.log_softmax(x, dim=1)# ModelNet40数据集
class ModelNetDataset(Dataset):def __init__(self, h5_file, num_points=1024, train=True):self.num_points = num_pointsself.train = train# 读取H5文件数据with h5py.File(h5_file, 'r') as f:self.data = f['data'][:]self.label = f['label'][:].squeeze().astype(np.int64)def __getitem__(self, idx):# 随机采样固定数量点pt_idx = np.random.choice(self.data.shape[1], self.num_points, replace=False)point_cloud = self.data[idx, pt_idx, :].astype(np.float32)# 数据增强(仅训练集)if self.train:# 随机缩放scale = np.random.uniform(0.8, 1.2)point_cloud = point_cloud * scale# 随机平移shift = np.random.uniform(-0.1, 0.1, 3)point_cloud = point_cloud + shift# 随机打乱点顺序np.random.shuffle(point_cloud)# 将点云居中并归一化point_cloud = point_cloud - np.mean(point_cloud, axis=0)dist = np.max(np.sqrt(np.sum(point_cloud ** 2, axis=1)))point_cloud = point_cloud / distreturn torch.from_numpy(point_cloud.transpose()), torch.from_numpy(np.array([self.label[idx]]))def __len__(self):return self.data.shape[0]# 训练函数
def train(model, train_loader, optimizer, device):model.train()train_loss = 0correct = 0total = 0for batch_idx, (data, target) in enumerate(train_loader):data, target = data.to(device), target.to(device).squeeze()optimizer.zero_grad()output = model(data)loss = F.nll_loss(output, target)loss.backward()optimizer.step()train_loss += loss.item()pred = output.max(1)[1]correct += pred.eq(target).sum().item()total += target.size(0)if batch_idx % 10 == 0:print(f'Train Batch: {batch_idx} [{total}/{len(train_loader.dataset)}]\t'f'Loss: {loss.item():.6f}\t'f'Accuracy: {100. * correct / total:.2f}%')return train_loss / len(train_loader), correct / total# 测试函数
def test(model, test_loader, device):model.eval()test_loss = 0correct = 0with torch.no_grad():for data, target in test_loader:data, target = data.to(device), target.to(device).squeeze()output = model(data)test_loss += F.nll_loss(output, target, reduction='sum').item()pred = output.max(1)[1]correct += pred.eq(target).sum().item()test_loss /= len(test_loader.dataset)accuracy = correct / len(test_loader.dataset)print(f'Test set: Average loss: {test_loss:.4f}, 'f'Accuracy: {correct}/{len(test_loader.dataset)} ({100. * accuracy:.2f}%)')return test_loss, accuracy# 主函数
def main():# 设置随机种子torch.manual_seed(1)np.random.seed(1)# 检测设备device = torch.device("cuda" if torch.cuda.is_available() else "cpu")# 数据加载器train_dataset = ModelNetDataset('modelnet40_train.h5', train=True)test_dataset = ModelNetDataset('modelnet40_test.h5', train=False)train_loader = DataLoader(train_dataset, batch_size=32, shuffle=True, num_workers=4)test_loader = DataLoader(test_dataset, batch_size=32, shuffle=False, num_workers=4)# 创建模型model = PointNetClassifier(num_classes=40).to(device)# 优化器optimizer = optim.Adam(model.parameters(), lr=0.001, weight_decay=1e-4)scheduler = optim.lr_scheduler.StepLR(optimizer, step_size=20, gamma=0.5)# 训练过程best_accuracy = 0for epoch in range(100):print(f"Epoch {epoch+1}/100")# 训练和测试train_loss, train_acc = train(model, train_loader, optimizer, device)test_loss, test_acc = test(model, test_loader, device)# 更新学习率scheduler.step()# 保存最佳模型if test_acc > best_accuracy:best_accuracy = test_acctorch.save(model.state_dict(), 'best_model.pth')print(f'Model saved with accuracy: {100. * best_accuracy:.2f}%')print(f'Best accuracy: {100. * best_accuracy:.2f}%')if __name__ == "__main__":main()
10. 总结与未来发展方向
在这两部分课程中,我们探讨了3D点云处理的基础知识,对比了体素化和原始点云处理方法,并深入研究了旋转不变性和等变性的实现。
10.1 技术总结
- 3D数据表示:点云、体素、网格等多种表示方式各有优缺点
- 处理方法:
- 体素化方法:转换为规则网格,使用3D CNN
- 原始点云方法:直接处理无序点集
- 图方法:将点云视为图结构
- 关键挑战:
- 排列不变性:点的顺序不应影响结果
- 旋转不变/等变性:处理刚性变换
- 点云的不规则性:点密度不均匀
- 主要网络架构:
- PointNet/PointNet++:直接处理点云的先驱
- DGCNN:利用动态图结构
- SphericalCNN:实现旋转等变性
10.2 未来发展方向
- 自监督学习:利用大量无标注点云数据
- 多模态融合:结合点云和图像/语义信息
- 大规模场景理解:城市级点云处理
- 对抗样本鲁棒性:提高点云网络对噪声和攻击的鲁棒性
- 更高效的网络:降低内存和计算需求,适应移动设备
- 时序点云处理:处理动态点云序列
- 无/少样本学习:解决数据稀缺问题
10.3 应用领域
- 自动驾驶:物体检测、语义分割、路径规划
- 机器人:物体抓取、环境理解、导航
- 增强现实:3D重建、场景理解
- 医学成像:器官分割、异常检测
- 建筑与城市规划:数字孪生、建筑检测
- 文化遗产保护:3D扫描与重建
- 工业检测:缺陷检测、质量控制
随着计算能力的提升和算法的不断进步,3D点云处理技术将在更多领域发挥关键作用,推动我们进入一个更智能、更自然的计算世界。希望本课程能为你的3D视觉学习之旅提供坚实的基础!
清华大学全五版的《DeepSeek教程》完整的文档需要的朋友,关注我私信:deepseek 即可获得。
怎么样今天的内容还满意吗?再次感谢朋友们的观看,关注GZH:凡人的AI工具箱,回复666,送您价值199的AI大礼包。最后,祝您早日实现财务自由,还请给个赞,谢谢!