1.2 点云数据获取方式——激光雷达
图1-2-1激光雷达
激光雷达(Light Detection and Ranging,LiDAR)是一种通过发射激光束并测量反射光来获取目标物体距离、速度、角度等信息的主动式遥感技术。它在自动驾驶、测绘、机器人等领域有着广泛应用。
激光雷达本质上是一种光探测与测距设备,通过向目标物体发射激光脉冲,然后接收从物体表面反射回来的激光信号,依据特定算法计算出目标物体的相关参数,从而实现对周围环境的感知与测绘。
1)原理
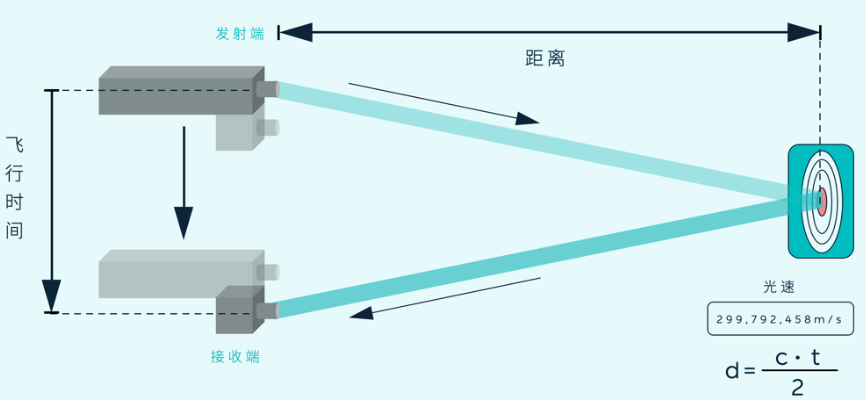
图1-2-2激光雷达原理图
激光雷达工作时,发射系统向目标物体发射激光脉冲,当激光脉冲遇到目标物体后会发生反射,反射光被接收系统捕获。通过精确测量激光脉冲从发射到接收的时间间隔(Time of Flight,ToF),结合光在空气中的传播速度(约为 299792458m/s ),利用公式d=c×Δt/2(d表示目标物体的距离,c为光速,Δt是激光脉冲往返的时间差),就能计算出目标物体与激光雷达之间的距离,从而获取目标的一个激光点数据。
然后,通过发射不同角度的脉冲,实现整个场景或目标的扫描,从而获得能够表征场景或目标表面几何信息的点云数据(包括三维空间位置、强度)。
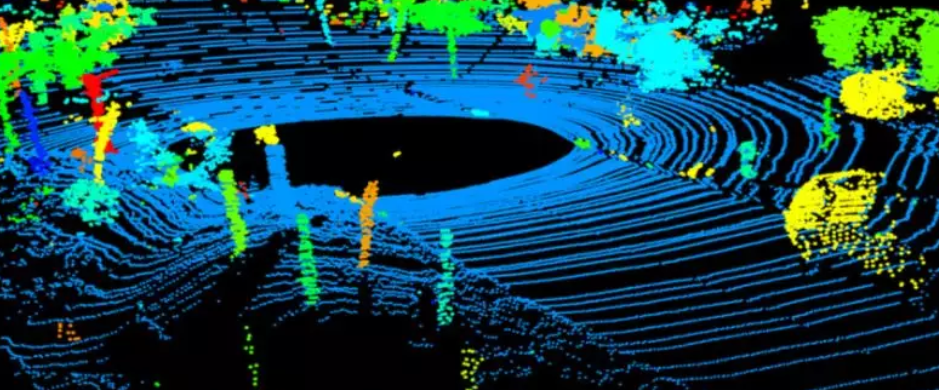
图1-2-3激光点云扫描结果
2)发展历程
2.1. 早期探索与机械式扫描(1960-1990 年)
1961 年:休斯飞机公司推出COLiDAR Mark II,首台激光测距仪用于军事目标瞄准。
1970 年代:机械式 ** 三坐标测量机(CMM)** 诞生,逐点扫描精度达微米级,用于工业质检。
1980 年代:激光线扫描仪(第二代)出现,通过逐线扫描提升效率,但速度仍受限。
2.2. 三维激光扫描技术崛起(1990-2000 年)
1995 年:三维激光扫描仪(第三代)问世,采用面扫描技术,每秒可捕获百万级点云,精度 0.1mm。
1999 年:国际摄影测量与遥感学会(ISPRS)将激光扫描列为第四代测绘技术,推动数字城市建设。
2.3. 多平台与智能化发展(2000-2020 年)
2005 年:Velodyne HDL-64E 开启多线激光雷达时代,自动驾驶车辆通过旋转激光束生成高密度点云。
2015 年:固态激光雷达技术突破,Quanergy 的 **OPA(光学相控阵)** 实现 250 米测距,无机械部件寿命提升至 10 万小时。
2020 年:华为、大疆推出车载转镜式激光雷达,成本降至 500 美元以下,支持 L3 级自动驾驶。
2.4. 数字化与产业融合(2020 年至今)
2023 年:AI 驱动的点云处理软件(如 LiDAR360)实现自动化分类、去噪与建模,效率提升 80%。
2025 年:数字孪生技术成熟,激光点云与 BIM 结合,华西乐城医院通过 3D 扫描实现毫米级施工精度。
未来趋势:
多传感器融合:激光雷达 + 视觉 + IMU 提升复杂场景鲁棒性(如特斯拉 FSD 方案)。
芯片化:速腾聚创自研 SoC 芯片,将激光雷达体积缩小 50%,功耗降低 70%。
绿色技术:低功耗激光雷达、太阳能供电机载扫描仪推动可持续测绘。
3)分类
表1-2-1 按扫描方式进行激光雷达分类
| 种类 | 扫描方式 | 优势 | 劣势 | 原理 |
| 机械式 | 机械式 | 能够进行360°水平视场扫描,高于其他方式FOV;测距能力远;技术成熟度高。 | 调试、装配工艺复杂,生产周期长;成本下降困难;体积大;机械部件寿命短,不适合量产车。 | 雷达整体360°旋转扫描。 |
| 半固态 | 转镜 | 成本较低;功耗较小;体积较小;可靠性高,利于车规级量产。 | 机械部件寿命短;测距能力短。 | 收发模块不动,通过电机带动转镜旋转扫描。 |
| MEMS | 成本低;准确度高;体积较小。 | MEMS材料对温度敏感,稳定性较差;测距能力短;依旧存在机械部件。 | 收发模块不动,通过MEMS微振镜旋转扫描,驱动方式有静电、电磁等。 | |
| 固态 | Flash | 成本低;体积小;耐用性高。 | 探测距离和精度限制大;能耗高;抗干扰能力差。 | 类似于手电筒,短时间发射出一大片覆盖探测区域的激光,可进行图像绘制。 |
| OPA | 测距能力远;体积小;分辨率高;耐用性高。 | 技术成熟度低;当前成本高。 | 采用多个光源组成阵列,通过往复控制各光源发射的相位差实现扫描效果。 |
4)厂商
表1-2-2 激光雷达代表厂商
| 种类 | 机械式 | 半固态 | 固态 | ||
| 转镜 | MEMS | Flash | OPA | ||
| 代表厂商 | Velodyne、Ouster、禾赛、速腾聚创、镭神智能等 | 华为、大疆览沃、Luminar、图达通、法雷奥、禾赛、镭神智能等 | Innoviz、Luminar、禾赛、速腾聚创、一径科技等 | Ibeo、Quster、北醒光子、北科天绘等 | Quanergy、力策科技等 |