foc控制 - clarke变换和park变换
1. foc控制框图
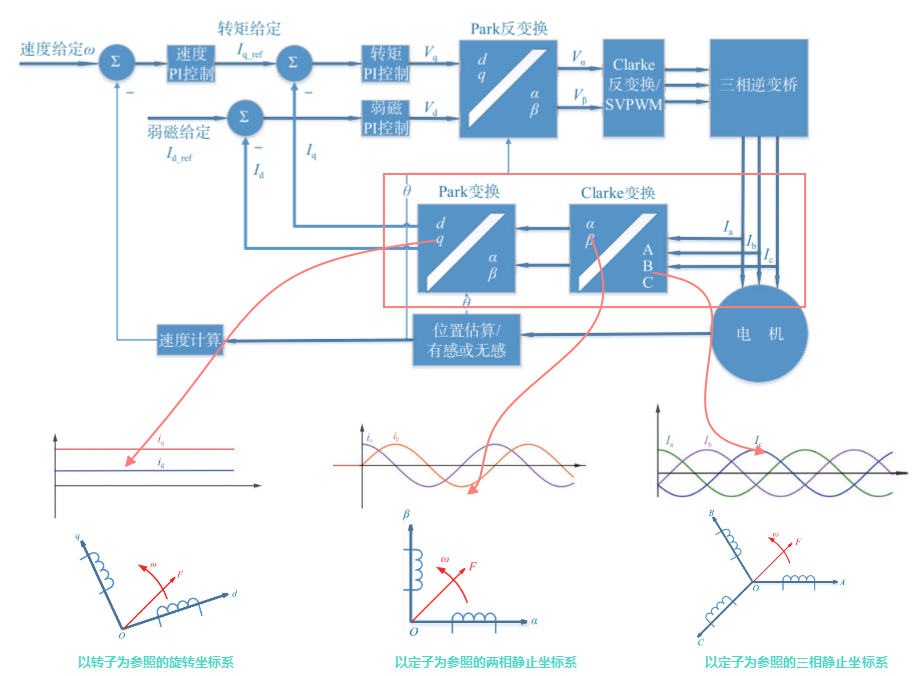
- 下图是foc控制框图,本文主要是讲解foc控制中的larke变换和park变换
- clarke变换将 静止的 a b c abc abc坐标系 变换到 静止的 α β αβ αβ坐标系,本质上还是以 定子 为基准的坐标系
- park变换 则将 α β αβ αβ坐标系 变换到 随 转子旋转的 d q dq dq旋转坐标系,本质是以 转子 为基准的坐标系,方便计算和分析
2. clarke变换
2.1 理解clarke变换是要做什么
- 答案就是下面这张图,无论是 a b c 坐标系 abc坐标系 abc坐标系 还是 α β 坐标系 αβ坐标系 αβ坐标系, 其实是在同一个平面坐标系中(定子所构成的平面),其实就是将 a b c 三相 abc三相 abc三相 的合成矢量重新分解到 α β 两相 αβ两相 αβ两相 中。
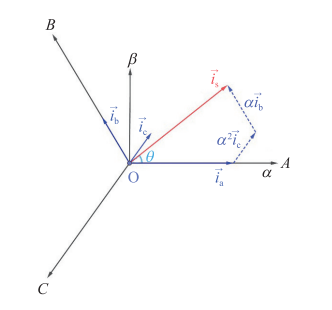
2.2 abc坐标系合成矢量的计算
- 三相对称正弦电流大小的计算公式(标量,只有大小没有方向)
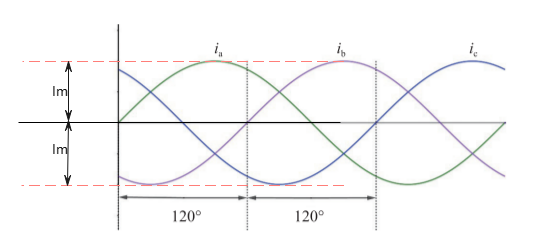
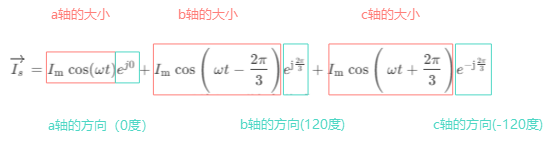
{ I a = I m cos ω t I b = I m cos ( ω t − 2 π 3 ) I c = I m cos ( ω t + 2 π 3 ) w : 角速度 ( 单位时间内转过的角度 ) ; t : 时间; w t : 转过的角度 − − 类比一下 − − v : 速度; t : 时间; v t : 走过的距离 − − − − − − − w = 2 π f / / 2 π : 36 0 o ; f = 周期 秒 \begin{cases}I_\mathrm{a}=I_\mathrm{m}\cos\omega t\\\\I_\mathrm{b}=I_\mathrm{m}\cos\left(\omega t-\frac{2\pi}{3}\right)\\\\I_\mathrm{c}=I_\mathrm{m}\cos\left(\omega t+\frac{2\pi}{3}\right)\end{cases}\\ w:角速度(单位时间内转过的角度); t:时间; wt:转过的角度\\ --类比一下--\\ v:速度; t:时间; vt:走过的距离\\ -------\\ w = 2\pi f //2\pi:360^o; f = \frac{周期}{秒} ⎩ ⎨ ⎧Ia=ImcosωtIb=Imcos(ωt−32π)Ic=Imcos(ωt+32π)w:角速度(单位时间内转过的角度);t:时间;wt:转过的角度−−类比一下−−v:速度;t:时间;vt:走过的距离−−−−−−−w=2πf//2π:360o;f=秒周期 - a b c 三相电流 abc三相电流 abc三相电流 合成矢量的计算公式为: I s → = I a → + I b → + I c → \overrightarrow{I_s}=\overrightarrow{I_\mathrm{a}}+\overrightarrow{I_\mathrm{b}}+\overrightarrow{I_\mathrm{c}} Is=Ia+Ib+Ic, 将上述方程组中的标量加上方向就是矢量
I s → = I a → + I b → + I c → − − I s → = I m cos ( ω t ) e j 0 + I m cos ( ω t − 2 π 3 ) e j 2 π 3 + I m cos ( ω t + 2 π 3 ) e − j 2 π 3 理解一下这个公式 \overrightarrow{I_s}=\overrightarrow{I_\mathrm{a}}+\overrightarrow{I_\mathrm{b}}+\overrightarrow{I_\mathrm{c}}\\ --\\ \overrightarrow{I_s}=I_\text{m}\cos(\omega t)e^{j0}+I_\text{m}\cos\Bigg(\:\omega t-\frac{2\pi}{3}\Bigg)e^{\mathrm{j}\frac{2\pi}{3}}+I_\text{m}\cos\Bigg(\:\omega t+\frac{2\pi}{3}\Bigg)e^{-\mathrm{j}\frac{2\pi}{3}} \\ 理解一下这个公式 Is=Ia+Ib+Ic−−Is=Imcos(ωt)ej0+Imcos(ωt−32π)ej32π+Imcos(ωt+32π)e−j32π理解一下这个公式
- 带入欧拉公式, 关于欧拉公式,可以参考我的另外一篇文章《理解欧拉公式》
欧拉公式 e i x = cos x + i sin x − − − − − − − − − − − − − − − − − − − − − − − − − − − 欧拉公式\\ e^{ix}=\cos x+i\sin x\\ --------------------------- 欧拉公式eix=cosx+isinx−−−−−−−−−−−−−−−−−−−−−−−−−−−
I ‾ s = I m cos ( ω t ) + I m cos ( ω t − 2 π 3 ) ( cos 2 π 3 + j sin 2 π 3 ) + I m cos ( ω t + 2 π 3 ) ( cos 2 π 3 − j sin 2 π 3 ) 进一步计算 I → s = I m cos ( ω t ) + I m [ cos ( ω t ) cos 2 π 3 + sin ( ω t ) sin 2 π 3 ] ( − 1 2 + j 3 2 ) + I m [ cos ( ω t ) cos 2 π 3 − sin ( ω t ) sin 2 π 3 ] ( − 1 2 − j 3 2 ) 带入三角函数的值 I ‾ s = I m cos ( ω t ) + I m [ − 1 2 cos ( ω t ) + 3 2 sin ( ω t ) ] ( − 1 2 + j 3 2 ) + I m [ − 1 2 cos ( ω t ) − 3 2 sin ( ω t ) ] ( − 1 2 − j 3 2 ) 进一步计算 I → s = I m cos ( ω t ) + I m [ 1 4 cos ( ω t ) − 3 4 sin ( ω t ) − j 3 4 cos ( ω t ) + j 3 4 sin ( ω t ) ] + I m [ 1 4 cos ( ω t ) + 3 4 sin ( ω t ) + j 3 4 cos ( ω t ) + j 3 4 sin ( ω t ) ] − − − − − − − − − − − − − − − − − − − − − − − − − \begin{aligned}\overline{I}_{\mathrm{s}}&=I_{\mathrm{m}}\cos(\omega t)+I_{\mathrm{m}}\cos\Bigg(\omega t-\frac{2\pi}{3}\Bigg)\Bigg(\cos\frac{2\pi}{3}+\text{j}\sin\frac{2\pi}{3}\Bigg)\\&+I_{\mathrm{m}}\cos\Bigg(\omega t+\frac{2\pi}{3}\Bigg)\Bigg(\cos\frac{2\pi}{3}-\text{j}\sin\frac{2\pi}{3}\Bigg)\end{aligned} \\ 进一步计算\\ \begin{aligned}\overrightarrow{I}_{\mathrm{s}}&=I_{\mathrm{m}}\cos(\omega t)+I_{\mathrm{m}}\Bigg[\cos\left(\omega t\right)\cos\frac{2\pi}{3}+\sin\left(\omega t\right)\sin\frac{2\pi}{3}\Bigg]\Bigg(-\frac{1}{2}+\mathrm{j}\frac{\sqrt{3}}{2}\Bigg)\\&+I_{\mathrm{m}}\Bigg[\cos\left(\omega t\right)\cos\frac{2\pi}{3}-\sin\left(\omega t\right)\sin\frac{2\pi}{3}\Bigg]\Bigg(-\frac{1}{2}-\mathrm{j}\frac{\sqrt{3}}{2}\Bigg)\end{aligned}\\ 带入三角函数的值\\ \begin{aligned}\overline{I}_{\mathrm{s}}&=I_{\mathrm{m}}\cos(\omega t)+I_{\mathrm{m}}\Bigg[-\frac{1}{2}\cos\left(\omega t\right)+\frac{\sqrt{3}}{2}\sin\left(\omega t\right)\Bigg]\Bigg(-\frac{1}{2}+\:\mathrm{j}\frac{\sqrt{3}}{2}\Bigg)\\&+I_{\mathrm{m}}\Bigg[-\frac{1}{2}\cos\left(\omega t\right)-\frac{\sqrt{3}}{2}\sin\left(\omega t\right)\Bigg]\Bigg(-\frac{1}{2}-\:\mathrm{j}\frac{\sqrt{3}}{2}\Bigg)\end{aligned}\\ 进一步计算\\ \begin{aligned}\overrightarrow{I}_{s}&=I_{\mathrm{m}}\cos(\omega t)+I_{\mathrm{m}}\left[\frac{1}{4}\cos\left(\omega t\right)-\frac{\sqrt{3}}{4}\sin\left(\omega t\right)-\mathrm{j}\frac{\sqrt{3}}{4}\cos\left(\omega t\right)+\mathrm{j}\frac{3}{4}\sin\left(\omega t\right)\right]\\&+I_{\mathrm{m}}\biggl[\frac{1}{4}\cos\left(\omega t\right)+\frac{\sqrt{3}}{4}\sin\left(\omega t\right)+\mathrm{j}\frac{3}{4}\cos\left(\omega t\right)+\mathrm{j}\frac{3}{4}\sin\left(\omega t\right)\biggr]\end{aligned}\\ -------------------------\\ Is=Imcos(ωt)+Imcos(ωt−32π)(cos32π+jsin32π)+Imcos(ωt+32π)(cos32π−jsin32π)进一步计算Is=Imcos(ωt)+Im[cos(ωt)cos32π+sin(ωt)sin32π](−21+j23)+Im[cos(ωt)cos32π−sin(ωt)sin32π](−21−j23)带入三角函数的值Is=Imcos(ωt)+Im[−21cos(ωt)+23sin(ωt)](−21+j23)+Im[−21cos(ωt)−23sin(ωt)](−21−j23)进一步计算Is=Imcos(ωt)+Im[41cos(ωt)−43sin(ωt)−j43cos(ωt)+j43sin(ωt)]+Im[41cos(ωt)+43sin(ωt)+j43cos(ωt)+j43sin(ωt)]−−−−−−−−−−−−−−−−−−−−−−−−−
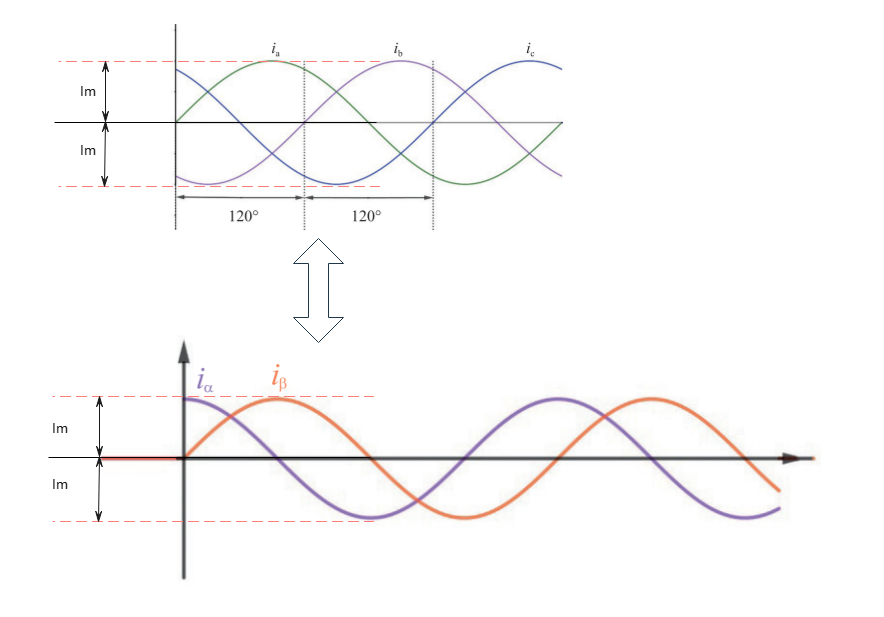
I ‾ s = 3 2 I m cos ( ω t ) + j 3 2 I m sin ( ω t ) 至此公式变成了复数的表达形式,还可以写成如下的等价形式 I s → = 3 2 I m e j ω t \overline{I}_{\mathrm{s}}=\frac{3}{2}I_{\mathrm{m}}\cos\left(\omega t\right)+\mathrm{j}\frac{3}{2}I_{\mathrm{m}}\sin\left(\omega t\right)\\ 至此公式变成了复数的表达形式,还可以写成如下的等价形式\\ \overrightarrow{I_s}=\frac{3}{2}I_\text{m}e^{\mathrm{j}\omega t} Is=23Imcos(ωt)+j23Imsin(ωt)至此公式变成了复数的表达形式,还可以写成如下的等价形式Is=23Imejωt - 由此可以看出,空间上互差120°的三相对称正弦电流的合成矢量是一个角速度为ω且绕中心点旋转的矢量,因此能形成旋转磁场。它的幅值是 I m I_m Im的 3 2 \frac{3}{2} 23 倍。
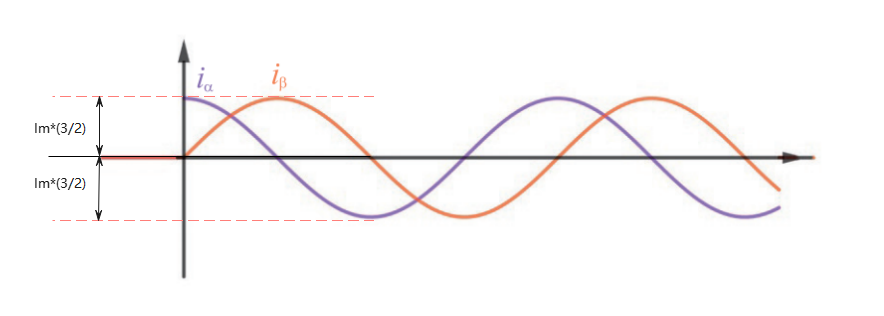
- 从最终推导出的公式可以看出来 I ‾ s = 3 2 I m cos ( ω t ) + j 3 2 I m sin ( ω t ) \overline{I}_{\mathrm{s}}=\frac{3}{2}I_{\mathrm{m}}\cos\left(\omega t\right)+\mathrm{j}\frac{3}{2}I_{\mathrm{m}}\sin\left(\omega t\right) Is=23Imcos(ωt)+j23Imsin(ωt), α β 轴 αβ轴 αβ轴变成了如下形式
2.3 clarke变换和反clarke变换 [ i a , i b , i c ] < = = > [ i α , i β ] [i_a, i_b, i_c]<==> [i_α, i_β] [ia,ib,ic]<==>[iα,iβ]
2.3.1 计算
- 这部分相对较为简单, 如下图所示,用最简单的三角函数就可以计算,就直接写答案了
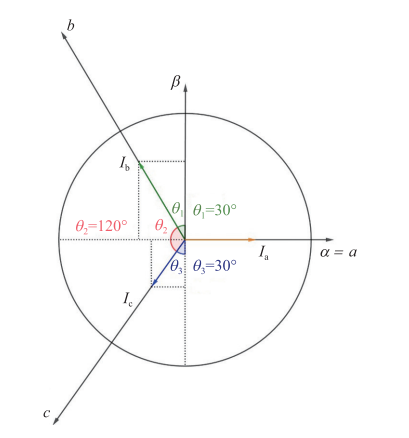
i α = I a − I b cos π 3 − I c cos π 3 i β = I b cos π 6 − I c cos π 6 − − − − − − − − − − − i α = I a − 1 2 I b − 1 2 I c i β = 3 2 I b − 3 2 I c − − − − − − − − − − − 写成矩阵的形式 [ i α i β ] = [ 1 − 1 2 − 1 2 0 3 2 − 3 2 ] [ I a I b I c ] i_{\alpha}=I_{\mathrm{a}}-I_{\mathrm{b}}\cos\frac{\pi}{3}-I_{\mathrm{c}}\cos\frac{\pi}{3}\\ i_{\beta}=I_{\mathrm{b}}\cos\frac{\pi}{6}-I_{\mathrm{c}}\cos\frac{\pi}{6}\\ -----------\\ i_{\alpha}=I_{\mathrm{a}}-\frac{1}{2}I_{\mathrm{b}}\:-\frac{1}{2}I_{\mathrm{c}}\:\\i_{\beta}\:=\frac{\sqrt{3}}{2}I_{\mathrm{b}}\:\:-\frac{\sqrt{3}}{2}I_{\mathrm{c}}\:\\ -----------\\ 写成矩阵的形式\\ \begin{bmatrix}i_\alpha\\i_\beta\end{bmatrix}=\begin{bmatrix}1&-\frac{1}{2}&-\frac{1}{2}\\\\0&\frac{\sqrt{3}}{2}&-\frac{\sqrt{3}}{2}\end{bmatrix}\begin{bmatrix}I_\mathrm{a}\\I_\mathrm{b}\\I_\mathrm{c}\end{bmatrix} iα=Ia−Ibcos3π−Iccos3πiβ=Ibcos6π−Iccos6π−−−−−−−−−−−iα=Ia−21Ib−21Iciβ=23Ib−23Ic−−−−−−−−−−−写成矩阵的形式[iαiβ]= 10−2123−21−23 IaIbIc
2.3.2 等幅值clarke变换
- 依据第2.2节的计算 I α , I β I_{\alpha}, I_{\beta} Iα,Iβ 的值最大为 3 2 倍的 I a , I b , I c \frac{3}{2}倍的I_a, I_b ,I_c 23倍的Ia,Ib,Ic,所以在 4.1节 的基础上乘以 2 3 \frac{2}{3} 32 使得变换前后的幅值相等,一般将这种变换称为 等幅值变换
c l a r k e 等伏值变换 i α = 2 3 ( I a − 1 2 I b − 1 2 I c ) i β = 2 3 ( 3 2 I b − 3 2 I c ) − − − − − − − − − − − − − − − − 矩阵形式 [ i α i β ] = 2 3 [ 1 − 1 2 − 1 2 0 3 2 − 3 2 ] [ I a I b I c ] clarke等伏值变换\\ i_{\alpha}=\frac{2}{3}(I_{\mathrm{a}}-\frac{1}{2}I_{\mathrm{b}}\:-\frac{1}{2}I_{\mathrm{c}}\:)\\i_{\beta}\:=\frac{2}{3}(\frac{\sqrt{3}}{2}I_{\mathrm{b}}\:\:-\frac{\sqrt{3}}{2}I_{\mathrm{c}}\:)\\ ----------------\\ 矩阵形式\\ \begin{bmatrix}i_\alpha\\i_\beta\end{bmatrix}=\frac{2}{3}\begin{bmatrix}1&-\frac{1}{2}&-\frac{1}{2}\\0&\frac{\sqrt{3}}{2}&-\frac{\sqrt{3}}{2}\end{bmatrix}\begin{bmatrix}I_\mathrm{a}\\I_\mathrm{b}\\I_\mathrm{c}\end{bmatrix}\\ clarke等伏值变换iα=32(Ia−21Ib−21Ic)iβ=32(23Ib−23Ic)−−−−−−−−−−−−−−−−矩阵形式[iαiβ]=32[10−2123−21−23] IaIbIc - 在电机控制中 I a + I b + I c = 0 I_{\mathrm{a}}+I_{\mathrm{b}}+I_{\mathrm{c}} = 0 Ia+Ib+Ic=0, 所以可以对上述公式进行化简
i α = 2 3 ( I a − 1 2 I b − 1 2 I c ) i β = 2 3 ( 3 2 I b − 3 2 I c ) − − − − − − − − − − − − − − − − I a + I b + I c = 0 = = > I c = − I a − I b 目标是消掉 I c i α = 2 3 ( I a − 1 2 I b − 1 2 ( − I a − I b ) ) = I a i β = 2 3 ( 0 + 3 2 I b − 3 2 ( − I a − I b ) ) = 1 3 I a + 2 3 I b i_{\alpha}=\frac{2}{3}(I_{\mathrm{a}}-\frac{1}{2}I_{\mathrm{b}}\:-\frac{1}{2}I_{\mathrm{c}}\:)\\i_{\beta}\:=\frac{2}{3}(\frac{\sqrt{3}}{2}I_{\mathrm{b}}\:\:-\frac{\sqrt{3}}{2}I_{\mathrm{c}}\:)\\ ----------------\\ I_{a}+I_{b}+I_{c}=0 ==> I_{c}=-I_{a}-I_{b}目标是消掉I_c\\ i_{\alpha}=\frac{2}{3}\left(I_{a}-\frac{1}{2}I_{b}-\frac{1}{2}\left(-I_{a}-I_{b}\right)\right)=I_{a}\\ i_{\beta}=\frac{2}{3}\left(0\:+\:\frac{\sqrt{3}}{2}I_{b}-\frac{\sqrt{3}}{2}(-I_{a}-I_{b})\right)=\frac{1}{\sqrt{3}}I_{a}+\frac{2}{\sqrt{3}}I_{b} iα=32(Ia−21Ib−21Ic)iβ=32(23Ib−23Ic)−−−−−−−−−−−−−−−−Ia+Ib+Ic=0==>Ic=−Ia−Ib目标是消掉Iciα=32(Ia−21Ib−21(−Ia−Ib))=Iaiβ=32(0+23Ib−23(−Ia−Ib))=31Ia+32Ib
i α = = I a i β = = 1 3 I a + 2 3 I b − − − − − − − − − − − − − − − − − − − 矩阵形式 [ i α i β ] = [ 1 0 1 3 2 3 ] [ I a I b ] i_{\alpha}==I_{a}\\ i_{\beta}==\frac{1}{\sqrt{3}}I_{a}+\frac{2}{\sqrt{3}}I_{b}\\ -------------------\\ 矩阵形式\\ \begin{bmatrix}i_\alpha\\i_\beta\end{bmatrix}=\begin{bmatrix}1&0\\\frac1{\sqrt3}&\frac2{\sqrt3}\end{bmatrix}\begin{bmatrix}I_a\\I_b\end{bmatrix} iα==Iaiβ==31Ia+32Ib−−−−−−−−−−−−−−−−−−−矩阵形式[iαiβ]=[131032][IaIb]
2.3.3 等幅值clarke反变换
I a = i α I b = − 1 2 i α + 3 2 i β I c = − 1 2 i α − 3 2 i β − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − 矩阵形式 [ I a I b I c ] = [ 1 0 − 1 2 3 2 − 1 2 − 3 2 ] [ i α i β ] I_{a}=i_{\alpha}\\ I_{b}=-\frac{1}{2}i_{\alpha}+\frac{\sqrt{3}}{2}i_{\beta}\\ I_{c}=-\frac{1}{2}i_{\alpha}-\frac{\sqrt{3}}{2}i_{\beta}\\ ------------------------------\\ 矩阵形式\\ \begin{bmatrix}I_a\\I_b\\I_c\end{bmatrix}=\begin{bmatrix}1&0\\-\frac12&\frac{\sqrt3}2\\-\frac12&-\frac{\sqrt3}2\end{bmatrix}\begin{bmatrix}i_\alpha\\i_\beta\end{bmatrix} Ia=iαIb=−21iα+23iβIc=−21iα−23iβ−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−矩阵形式 IaIbIc = 1−21−21023−23 [iαiβ]
3. park变换
3.1 说明
- clarke变换将 静止的 a b c abc abc坐标系 变换到 静止的 α β αβ αβ坐标系,本质上还是以 定子 为基准的坐标系
- park变换 则将 α β αβ αβ坐标系 变换到 随 转子旋转的 d q dq dq旋转坐标系,本质是以 转子 为基准的坐标系,方便计算和分析
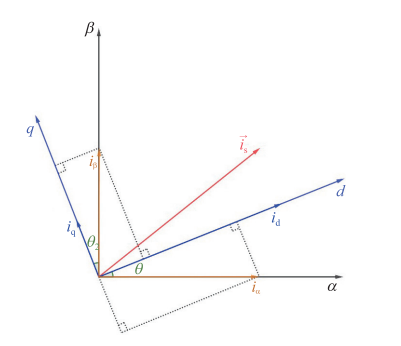
- park的方法如下图所示
3.2 park变换公式
i d = i α cos θ + i β sin θ i q = − i α sin θ + i β cos θ − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − 矩阵形式 [ i d i q ] = [ cos θ sin θ − sin θ cos θ ] [ i α i β ] i_{\mathrm{d}}=i_{\alpha}\cos\theta+i_{\beta}\sin\theta \\ i_{\mathrm{q}}=-i_{\alpha}\sin\theta+i_{\beta}\cos\theta \\ -------------------------------------\\ 矩阵形式\\ \begin{bmatrix}i_d\\i_q\end{bmatrix}=\begin{bmatrix}\cos\theta&\sin\theta\\-\sin\theta&\cos\theta\end{bmatrix}\begin{bmatrix}i_\alpha\\i_\beta\end{bmatrix} id=iαcosθ+iβsinθiq=−iαsinθ+iβcosθ−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−矩阵形式[idiq]=[cosθ−sinθsinθcosθ][iαiβ]
3.3 park反变换公式
i α = i d cos θ − i q sin θ i β = i d sin θ + i q cos θ − − − − − − − − − 矩阵形式 [ i α i β ] = [ cos θ − sin θ sin θ cos θ ] [ i d i q ] i_{\alpha}=i_{d}\cos\theta-i_{q}\sin\theta \\ i_{\beta}=i_{d}\sin\theta+i_{q}\cos\theta \\ ---------\\ 矩阵形式\\ \begin{bmatrix}i_\alpha\\i_\beta\end{bmatrix}=\begin{bmatrix}\cos\theta&-\sin\theta\\\sin\theta&\cos\theta\end{bmatrix}\begin{bmatrix}i_d\\i_q\end{bmatrix} iα=idcosθ−iqsinθiβ=idsinθ+iqcosθ−−−−−−−−−矩阵形式[iαiβ]=[cosθsinθ−sinθcosθ][idiq]