单片机与FPGA的核心差异、优缺点、编程差异、典型应用场景、选型等对比分析
1. 基本概念差异
单片机(MCU):
基于冯·诺依曼/哈佛架构的微控制器,集成CPU、内存、外设接口(如ADC、UART、PWM等),通过软件指令顺序执行任务。
FPGA:
由可编程逻辑单元(CLB)、互连资源、存储块等构成,通过硬件描述语言(HDL)配置为定制电路,支持并行处理和硬件重构。
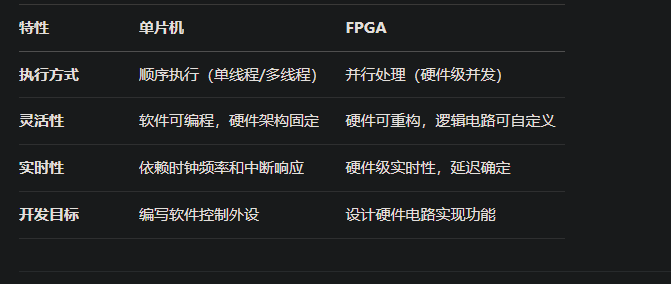
2. 核心差异
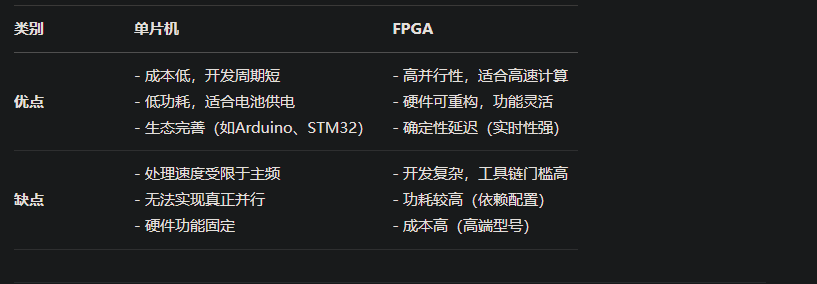
3. 优缺点对比
4. 编程差异

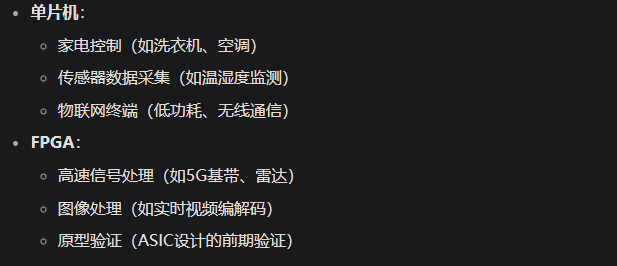
5. 典型应用场景
6. 选型建议
选择单片机:
需要低成本、快速开发、低功耗,且任务复杂度适中(如控制逻辑、通信协议)。
选择FPGA:
需要高速并行处理(如FFT、滤波)、硬件可重构(如协议适配)、或严格实时性(如工业控制)。
7. 趋势补充
融合方案:
部分SoC(如Xilinx Zynq)集成ARM核与FPGA逻辑,兼顾软件灵活性与硬件加速。
工具演进:
FPGA高层次综合(HLS)支持C/C++直接生成硬件,降低开发门槛。
通过以上对比,可根据项目需求在“灵活性、速度、成本”之间权衡选择。