图像预处理-色彩空间补充,灰度化与二值化
一.图像色彩空间转换
1.1 HSV颜色空间
HSV颜色空间使用色调(Hue)、饱和度(Saturation)和亮度(Value)三个参数来表示颜色
一般对颜色空间的图像进行有效处理都是在HSV空间进行的,然后对于基本色中对应的HSV分量需要给定一个严格的范围,下面是通过实验计算的模糊范围(准确的范围在网上都没有给出)。
H: 0— 180
S: 0— 255
V: 0— 255
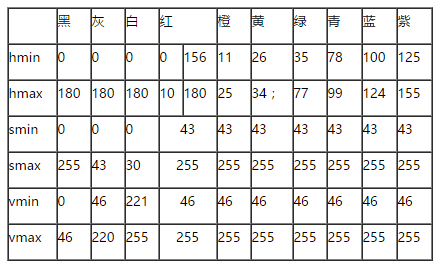
也就是可以通过颜色的范围来提取图像中的一种或多种颜色。
HSV的好处:
- 符合人类对颜色的感知方式:人类对颜色的感知是基于色调、饱和度和亮度三个维度的,而HSV颜色空间恰好就是通过这三个维度来描述颜色的。因此,使用HSV空间处理图像可以更直观地调整颜色和进行色彩平衡等操作,更符合人类的感知习惯。
- 颜色调整更加直观:例如,在RGB空间中要调整红色系的颜色,需要同时调整R、G、B三个通道的数值,而在HSV空间中只需要调整色调和饱和度即可。
- 降维处理有利于计算:在图像处理中,降维处理可以减少计算的复杂性和计算量。HSV颜色空间相对于RGB颜色空间,减少了两个维度(红、绿、蓝)
1.2 颜色空间转换
cv2.cvtColor(img,code)
code:指定转换的类型,可以使用预定义的转换代码。
- cv2.COLOR_RGB2GRAY 表示从RGB到灰度图像的转换
- cv2.COLOR_BGR2HSV 从RGB到HSV的转换
二.灰度化
彩色图是由R、G、B三个通道组成,而灰度图只有一个通道。
灰度图像与黑白图像不同,在计算机图像领域中黑白图像只有黑色与白色两种颜色但是,灰度图像的取值可以是0~255,不过只有一个通道。这样可以有256级灰度
# 在读取时也可以直接将其转化为灰度图
import cv2 as cvimg = cv.imread('../images/flower.png', cv.IMREAD_GRAYSCALE)
cv.imshow('Gray Image', img)
cv.waitKey(0)
cv.destroyAllWindows()
2.1 最大值法
从R、G、B三个通道的值中选出最大的一个,并将其作为灰度图像中对应位置的像素值.
2.2 平均值法
将R、G、B三个通道的像素值全部加起来,然后再除以三。
2.3 加权均值法(最常用且内置)
按照一定的权重去乘以每个通道的像素值,并将其相加,得到最后的值就是灰度图像中对应位置的像素值。权重的比例为: R乘以0.299,G乘以0.587,B乘以0.114,这是经过大量实验得到的一个权重比例,也是一个比较常用的权重比例
import cv2 as cvimg = cv.imread('../images/flower.png')
flower = cv.resize(img,(200, 200))gray = cv.cvtColor(flower, cv.COLOR_BGR2GRAY)cv.imshow('Original', flower)
cv.imshow('Gray', gray) cv.waitKey(0)
cv.destroyAllWindows()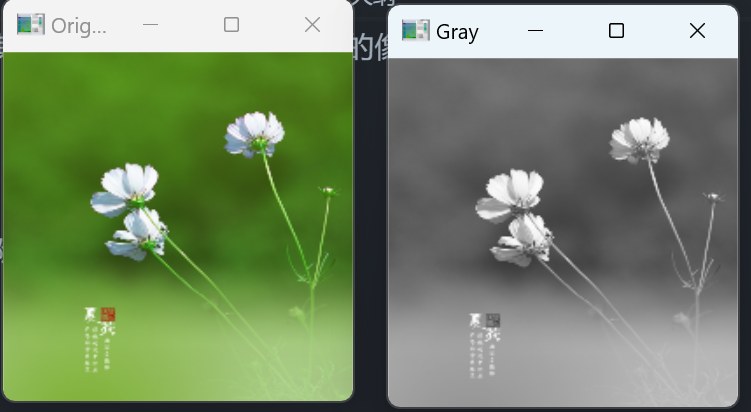
三. 二值化处理
二值图像的二维矩阵仅由两个值构成,也就是灰度图像的取值范围变了,只有0,1
- 其操作的图像必须是灰度图
二值化处理函数:
_,binary = cv2.threshold(img,thresh,maxval,type)
- img:输入图像,要进行二值化处理的灰度图。
- thresh:设定的阈值。
- maxval:当像素值大于(或小于,取决于阈值类型)thresh时,该像素被赋予的值。
- type:阈值处理的类型。
- 返回值:
- 第一个值(通常用下划线表示):计算出的阈值,若使用自适应阈值法,会根据算法自动计算出这个值。
- 第二个值(binary):二值化后的图像矩阵。与输入图像尺寸相同。
3.1 阈值法
THRESH_BINARY
设置一个阈值,将灰度图中的每一个像素值与该阈值进行比较,小于等于阈值的像素就被设置为0(通常代表背景),大于阈值的像素就被设置为maxval(通常为255)
import cv2 as cvimg = cv.imread('../images/flower.png')
flower = cv.resize(img,(200, 200))# 获得灰度图
gray = cv.cvtColor(flower, cv.COLOR_BGR2GRAY)# 使用阈值法二值化
_,binary = cv.threshold(gray, 127, 255, cv.THRESH_BINARY)cv.imshow('flower', gray)
cv.imshow('binary', binary)
cv.waitKey(0)
cv.destroyAllWindows()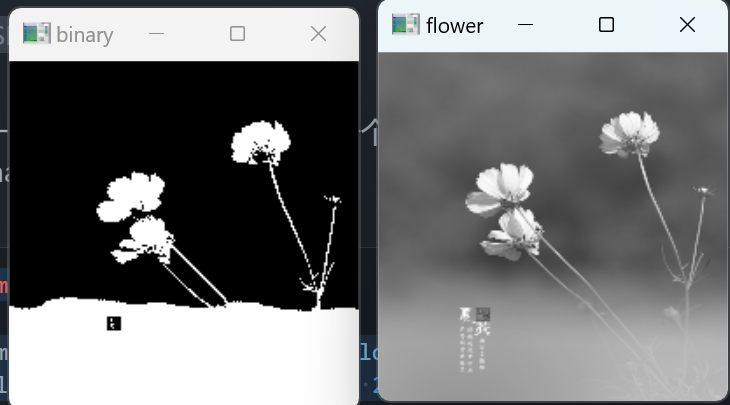
3.2 反阈值法
THRESH_BINARY_INV
与阈值法相反
import cv2 as cvimg = cv.imread('../images/flower.png')
flower = cv.resize(img,(200, 200))# 获得灰度图
gray = cv.cvtColor(flower, cv.COLOR_BGR2GRAY)# 使用反阈值法二值化
_,binary = cv.threshold(gray, 127, 255, cv.THRESH_BINARY_INV)cv.imshow('flower', gray)
cv.imshow('binary', binary)
cv.waitKey(0)
cv.destroyAllWindows()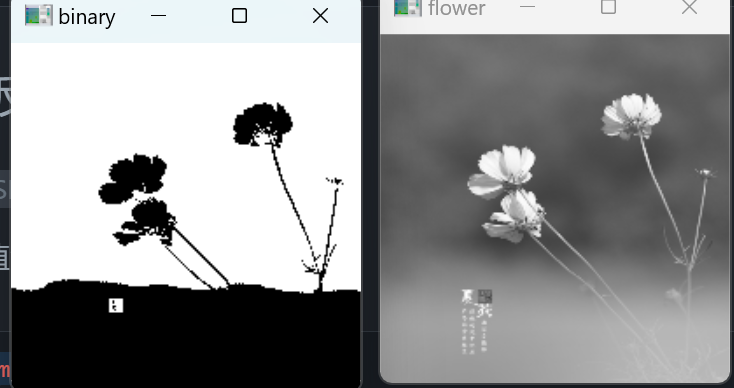
3.3 截断阈值法
THRESH_TRUNC
所有像素与阈值进行比较,像素值大于阈值的部分将会被修改为阈值,小于等于阈值的部分不变
import cv2 as cvimg = cv.imread('../images/flower.png')
flower = cv.resize(img,(200, 200))# 获得灰度图
gray = cv.cvtColor(flower, cv.COLOR_BGR2GRAY)# 使用截断阈值法二值化
# 可以看到我们依然给了maxval,但是实际上这个maxval没有起作用,但是还是要写不然会报错
_,binary = cv.threshold(gray, 127, 255, cv.THRESH_TRUNC)cv.imshow('flower', gray)
cv.imshow('binary', binary)
cv.waitKey(0)
cv.destroyAllWindows()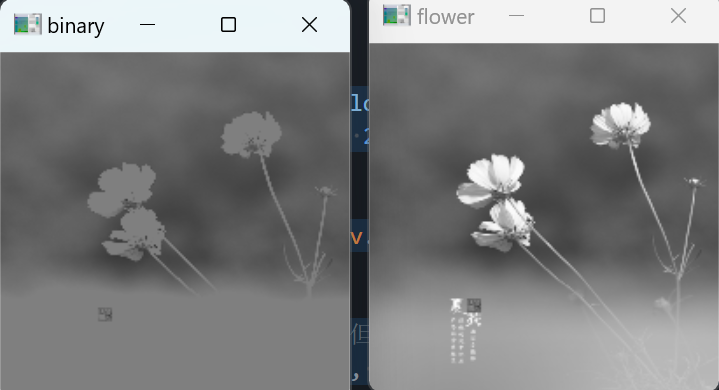
3.4 低阈值零处理
THRESH_TOZERO
像素值小于等于阈值的部分被置为0,大于阈值的部分不变。
import cv2 as cvimg = cv.imread('../images/flower.png')
flower = cv.resize(img,(200, 200))# 获得灰度图
gray = cv.cvtColor(flower, cv.COLOR_BGR2GRAY)# 使用低阈值零处理二值化_,binary = cv.threshold(gray, 127, 255, cv.THRESH_TOZERO)cv.imshow('flower', gray)
cv.imshow('binary', binary)
cv.waitKey(0)
cv.destroyAllWindows()
3.5 超阈值零处理
THRESH_TOZERO_INV
像素值大于阈值的部分置为0,像素值小于等于阈值的部分不变。
import cv2 as cvimg = cv.imread('../images/flower.png')
flower = cv.resize(img,(200, 200))# 获得灰度图
gray = cv.cvtColor(flower, cv.COLOR_BGR2GRAY)# 使用超阈值零处理二值化
_,binary = cv.threshold(gray, 127, 255, cv.THRESH_TOZERO_INV)cv.imshow('flower', gray)
cv.imshow('binary', binary)
cv.waitKey(0)
cv.destroyAllWindows()
3.6 OTSU阈值法
cv2.THRESH_OTS
cv2.THRESH_OTS 并不是一个有效的阈值类型或标,它其实是用来计算合适阈值的方法,通常与 THRESH_BINARY 或 THRESH_BINARY_INV 结合使用
OTSU算法是通过一个值将这张图分前景和背景
(也就是灰度图中小于这个值的是一类,大于这个值的是一类。例如,如果你设置阈值为128,则所有大于128的像素点可以被视作前景,而小于等于128的像素点则被视为背景。)
通过统计学方法(最大类间方差)来验证该值的合理性,当根据该值进行分割时,使用最大类间方差计算得到的值最大时,该值就是二值化算法中所需要的阈值。通常该值是从灰度图中的最小值加1开始进行迭代计算,直到灰度图中的最大像素值减1,然后把得到的最大类间方差值进行比较。
import cv2 as cvimg = cv.imread('../images/flower.png')
flower = cv.resize(img,(200, 200))# 获得灰度图
gray = cv.cvtColor(flower, cv.COLOR_BGR2GRAY)# 使用OTSU阈值法二值化(默认是结合阈值法即THRESH_BINARY)
_,binary = cv.threshold(gray, 127, 255, cv.THRESH_OTSU)
# 结合反阈值法
_,binary1 = cv.threshold(gray, 0, 255, cv.THRESH_OTSU+cv.THRESH_BINARY_INV)cv.imshow('flower', gray)
cv.imshow('binary', binary)
cv.imshow('binary1', binary1)
cv.waitKey(0)
cv.destroyAllWindows()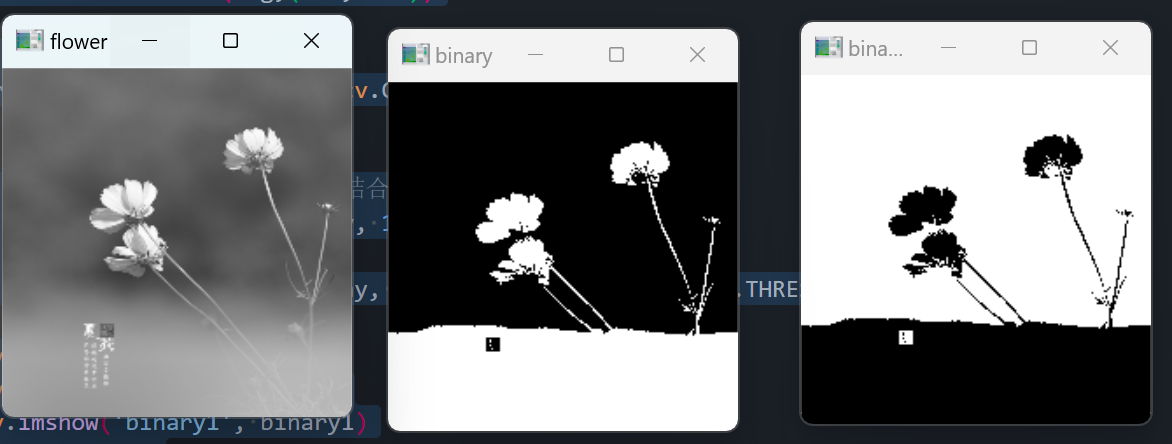
3.7 自适应二值化
其会对图像中的所有像素点计算其各自的阈值,将图像划分为固定大小的块,然后对每个块进行阈值处理。
cv2.adaptiveThreshold
(image_np_gray, 255, cv2.ADAPTIVE_THRESH_MEAN_C, cv2.THRESH_BINARY, 7, 10)
参数:
maxval:最大阈值,一般为255
adaptiveMethod:小区域阈值的计算方式:
ADAPTIVE_THRESH_MEAN_C:小区域内取均值
ADAPTIVE_THRESH_GAUSSIAN_C:小区域内加权求和,权重是个高斯核
thresholdType:二值化方法,只能使用THRESH_BINARY、THRESH_BINARY_INV,也就是阈值法和反阈值法
blockSize:选取的小区域的面积,如7就是7\*7的小块。
C:最终阈值等于小区域计算出的阈值再减去此值
自适应二值化更加适合用在明暗分布不均的图片,因为图片的明暗不均,导致图片上的每一小部分都要使用不同的阈值进行二值化处理。
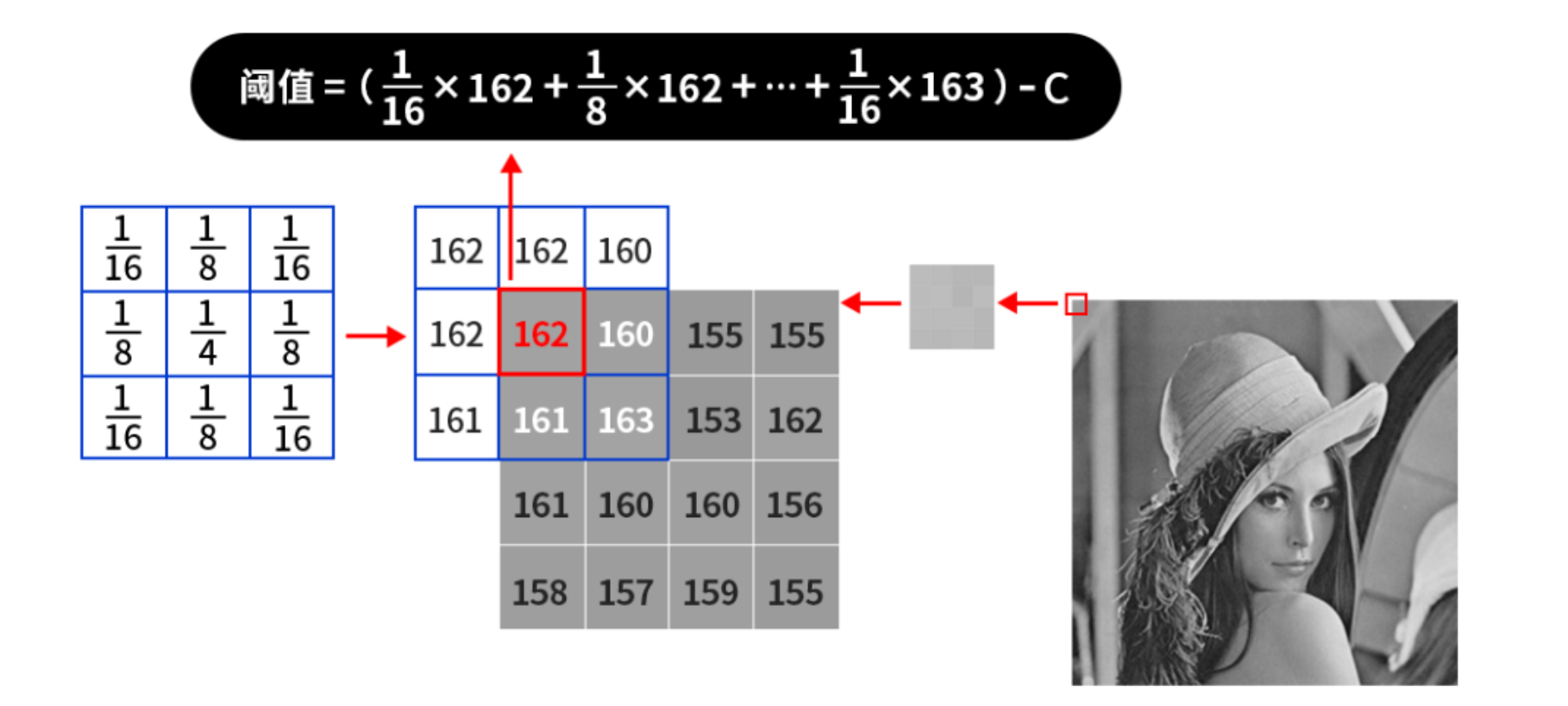
3.7.1 取均值
从图片的左上角开始计算其邻域内的平均值,用一个均值卷积核来实现,将卷积核中心对准要阈值处理的像素,然后计算这个卷积核内所有像素的平均值,最后减去常数C得到该点阈值。
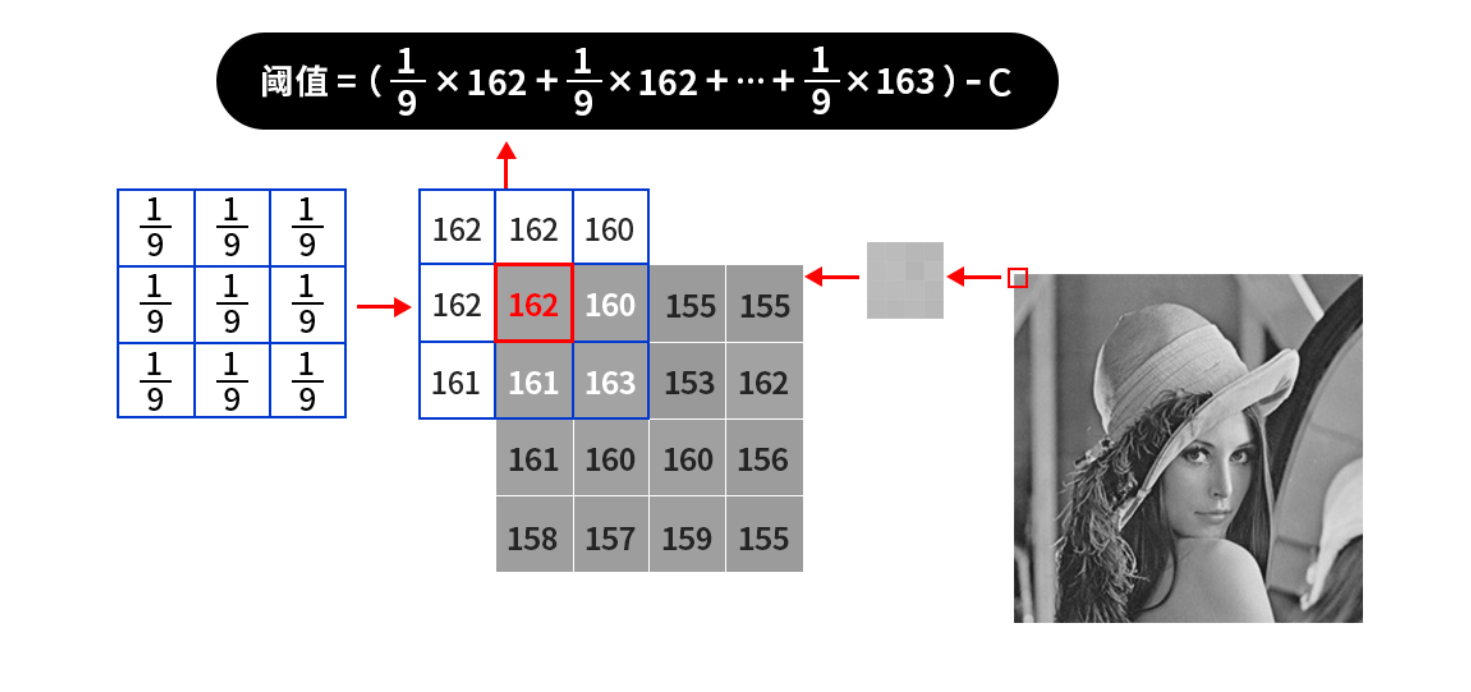
如图,如果像取第一个元素卷积核有空缺处,就按边缘填充的方式填充。
3.7.2 加权求和
对小区域内的像素进行加权求和得到新的阈值,其权重值来自于高斯分布。与取均值的区别就是采用另一种规则的卷积核进行阈值选择,函数中有着基本相同的参数。
3*3卷积核示例: