履带小车+六轴机械臂(2)
本次介绍原理图部分
开发板部分,电源供电部分,六路舵机,PS2手柄接收器,HC-05蓝牙模块,蜂鸣器,串口,TB6612电机驱动模块,LDO线性稳压电路,按键部分
1、开发板部分
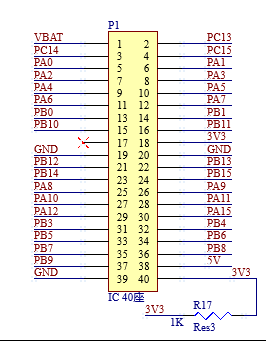
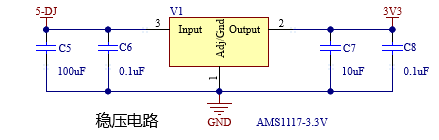
需要注意的是:如果采用电池供电那么电流会过大时间长AMS1117会严重的发热,另外降压的压差也不能过大,不人也会有过大的发热现象,且会烧毁单片机;
所及串联了一个电阻以降低电流的输入;
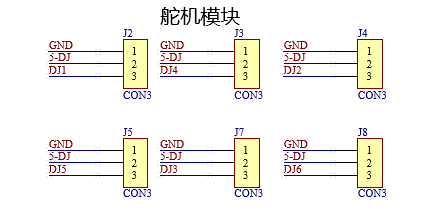
2、六路的舵机就只需要吧IO口引出来就行了,这里不过多的介绍了;
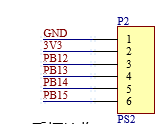
3、PS2手柄接收器用的是SPI通信,且是软件模拟SPI
4、HC-05蓝牙模块,蜂鸣器,串口,TB6612电机驱动模块;
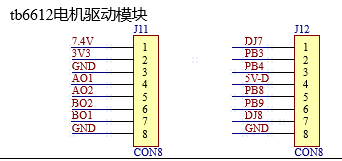
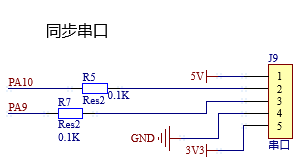
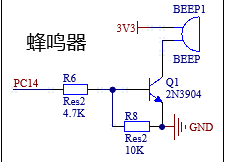 只需要吧IO口引出来,和一些基本的电路这里也不过多的介绍了;
只需要吧IO口引出来,和一些基本的电路这里也不过多的介绍了;
5、LDO线性稳压电路
6、这里对PWM输出的IO口串联一个电阻
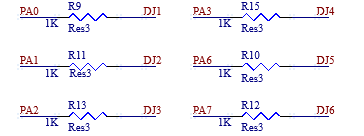
- 保护电路:限制电流,防止负载电流过大损坏 IO 口;缓冲负载变化的影响,减少对 IO 口的冲击;隔离负载对 IO 口的电气干扰,提高系统稳定性。
- 优化信号传输:调整阻抗,使信号源与负载更好地匹配,减少信号反射与失真;配合负载电容组成 RC 滤波电路,滤除 PWM 波中的高频成分,使输出信号更平滑。
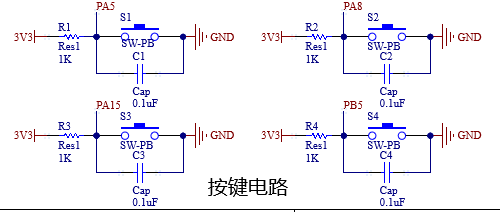
7、按键部分
8、至于电源部分,我这里用的是分开的两路供电,但是你们参考只需要看下框架和思路就行了,至于电源供电方面也会有无限的可能;