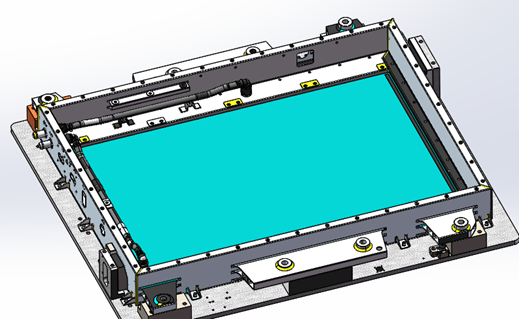
4.3 某箱体上自动涂胶视觉引导功能解析
案例:某箱体上要进行涂胶,但是箱体来料有XY以及旋转方向的偏差。因此需要对机器人进行纠正,大致过程如下:
一、相关的坐标系:
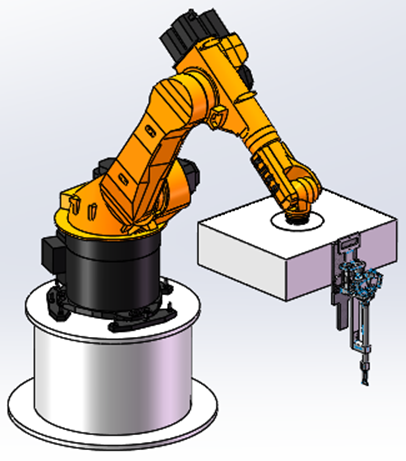
1、胶嘴位置的工具坐标系TOOL[2]
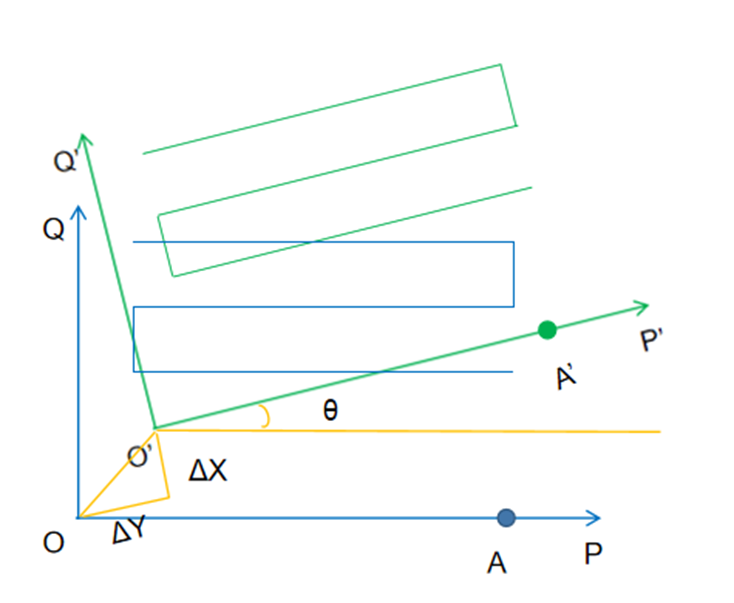
2、标准托盘上的基坐标系(又称用户坐标系、Local坐标系):OAQ,BASE[1]
3、实际托盘上的基坐标系(又称用户坐标系、Local坐标系)
案例:某箱体上要进行涂胶,但是箱体来料有XY以及旋转方向的偏差。因此需要对机器人进行纠正,大致过程如下:
一、相关的坐标系:
1、胶嘴位置的工具坐标系TOOL[2]
2、标准托盘上的基坐标系(又称用户坐标系、Local坐标系):OAQ,BASE[1]
3、实际托盘上的基坐标系(又称用户坐标系、Local坐标系)