GMSL 使用 GPIO Forward 功能实现 Frame Sync
ADAS 应用中,比如倒车时,会将汽车的四个环视摄像头拼接为鸟瞰图
便于用户直观的看到车身周围的环境

在拼图的时候,需要保证四个 Camera 抓取的是同一时刻的图像
那么,这个时候就需要一个 trigger 信号,让四个摄像头同时工作,即 Frame Sync
GMSL 支持 Frame Sync 功能,可内部产生 Internal Frame Sync 信号,
也可接收外部 SoC 产生的 Frame Sync, 然后 Forward 给链路所接的多个摄像头模组
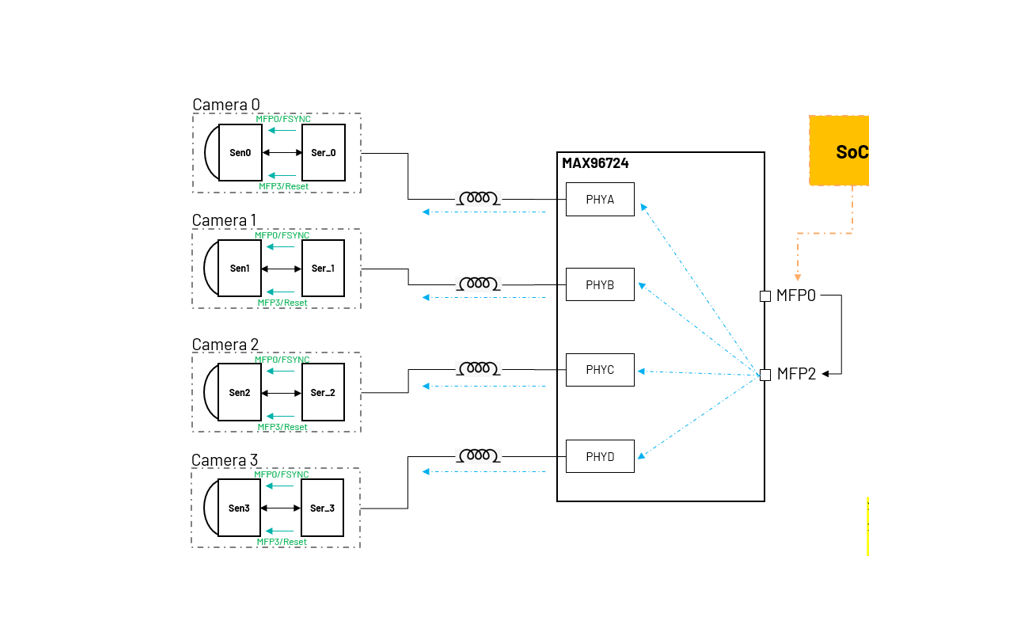
比如,如下的应用框图:
- SoC 产生 external frame sync : 这里利用 MAX96724 自身的 MFP0 输出 frame sync 控制信号,模拟 SoC 的 control
- MFP2 作为接收 Frame Sync 的输入,并将其传递到四个 PHYA-B-C-D
- 然后通过四个链路分别传递给对应的摄像头模组
- 摄像头内部使用 加串器/SER 的 MFP0 控制 image sensor 的 Frame Sync 信号
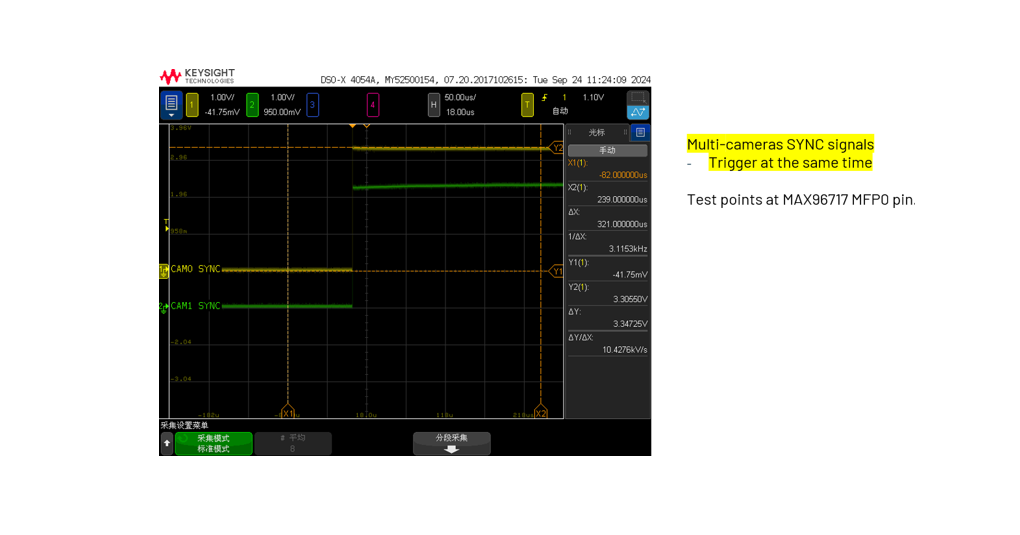
实测结果如下: