UM621系列模块安装校准及注意事项
1.1模块自校准
在 UM621 系列模块安装之后需要等待模块完成自校准以确保模块精确地输出。在自
校准过程中,模块将会对自身安装状态参数和传感器参数进行估计。在自校准完成之前,
定位为纯卫导模式;在自校准完成之后,定位为卫导与惯导紧组合模式。
- 完成自校准条件
‒ 上电后,自校准开始,停车不少于三分钟;
‒ 自校准过程中保证良好的卫星可见性(可见卫星数不少于 6 颗,且 CN0 在 30dB
以上),卫星观测质量越好,校准越快;
‒ 在正常行驶的前提下,进行不少于 5 次的 90 度转弯机动(固定安装无需此项操
作);
‒ 在正常行驶的前提下,直行机动下加速度行驶,行驶速度保持在 36 km/h 以上,
加减速次数越多(加速度>0.5m/s2,加速次数不少于 10 次),高速行驶时间越
长,校准越快。
惯性导航第一次对准后(insstatus 为 3),仍需在正常开阔环境下行驶 15 分钟左
右,使惯导器件训练充足,如第一次对准后立即进入隧道、车库等复杂环境,有可能会导致导航精度略差。
模块的正常使用仅需要完成一次自校准过程。
惯导模块完成校准后,需要完全断电后,才可以进行移动,包括主电 VCC 以及备电
V_BCKP。
2.2碰撞唤醒使用注意事项
碰撞唤醒功能利用板载 IMU 的特性实现。
发送 CFGACC 命令开启碰撞唤醒模式并设置相应阈值。
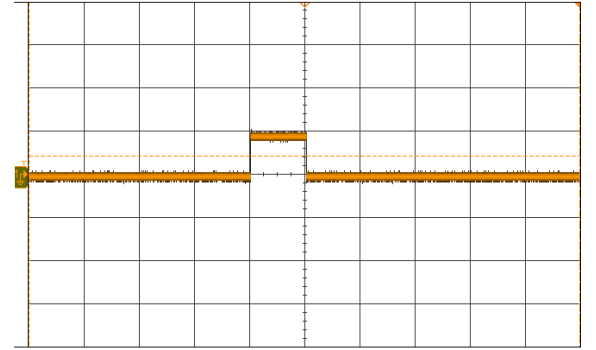
IMU 在检测到加速度值超过阈值时模块 Pin17 输出脉冲信号。
IMU 在切换到碰撞唤醒模式后无法进行正常组合导航,推荐在车辆停车熄火之前开启。
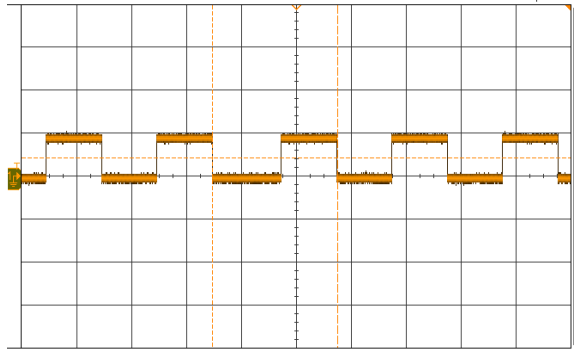
连续晃动状态下输出 2Hz 50% duty cycle。
单次晃动
注:最新内容请参考和芯星通官网发布文件。