学习海康VisionMaster之多直线查找
一:进一步学习了
今天学习下VisionMaster中的多直线查找,这个还是拟合直线的衍生应用,可以在测量框内同时查找多段时间
二:开始学习
1:什么是多直线查找?
一个检测框,就可以在检测框里面同时检测多条直线,如果使用单个直线拟合,需要画多个窗口,那多直线的优势就体现了,一个测量框就解决问题
2:应用场景:
-
PCB板边缘检测:检测电路板的直线边缘是否平直
-
液晶屏边框检测:验证显示屏边缘直线度
-
电子元件排列检测:检查排针、连接器等直线排列元件的位置精度
三:直接上案例
1:先导入需要测试的图片集合
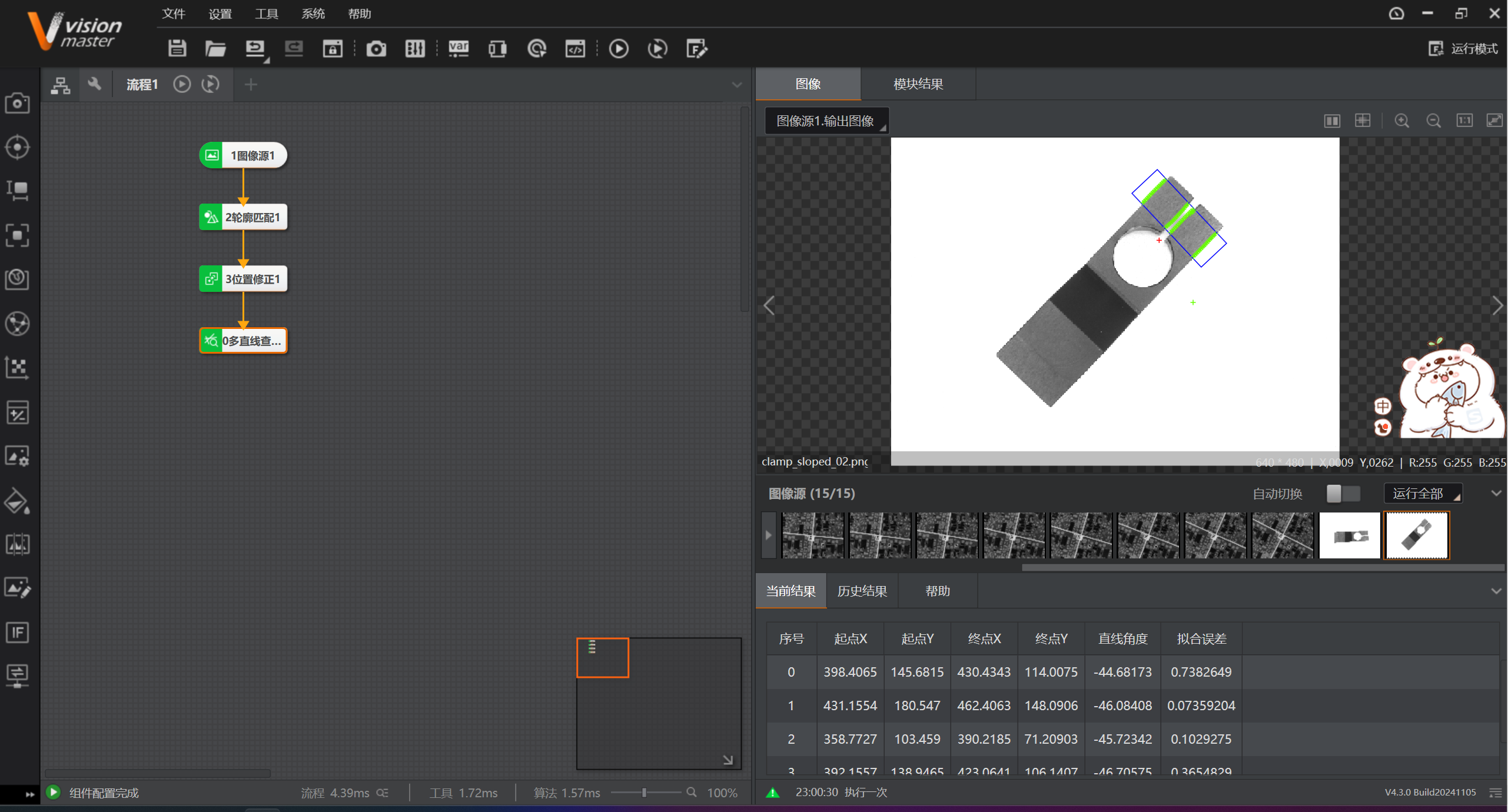
2:使用轮廓定位,把两个组件的线连起来,这里是需要设定模版匹配功能,这样图像不管怎么旋转都能准确定位图像位置,具体操作步骤可以参考前面课程
3:拖入位置修正功能:这个非常重要,这里也不提了,可以参考上一篇笔记
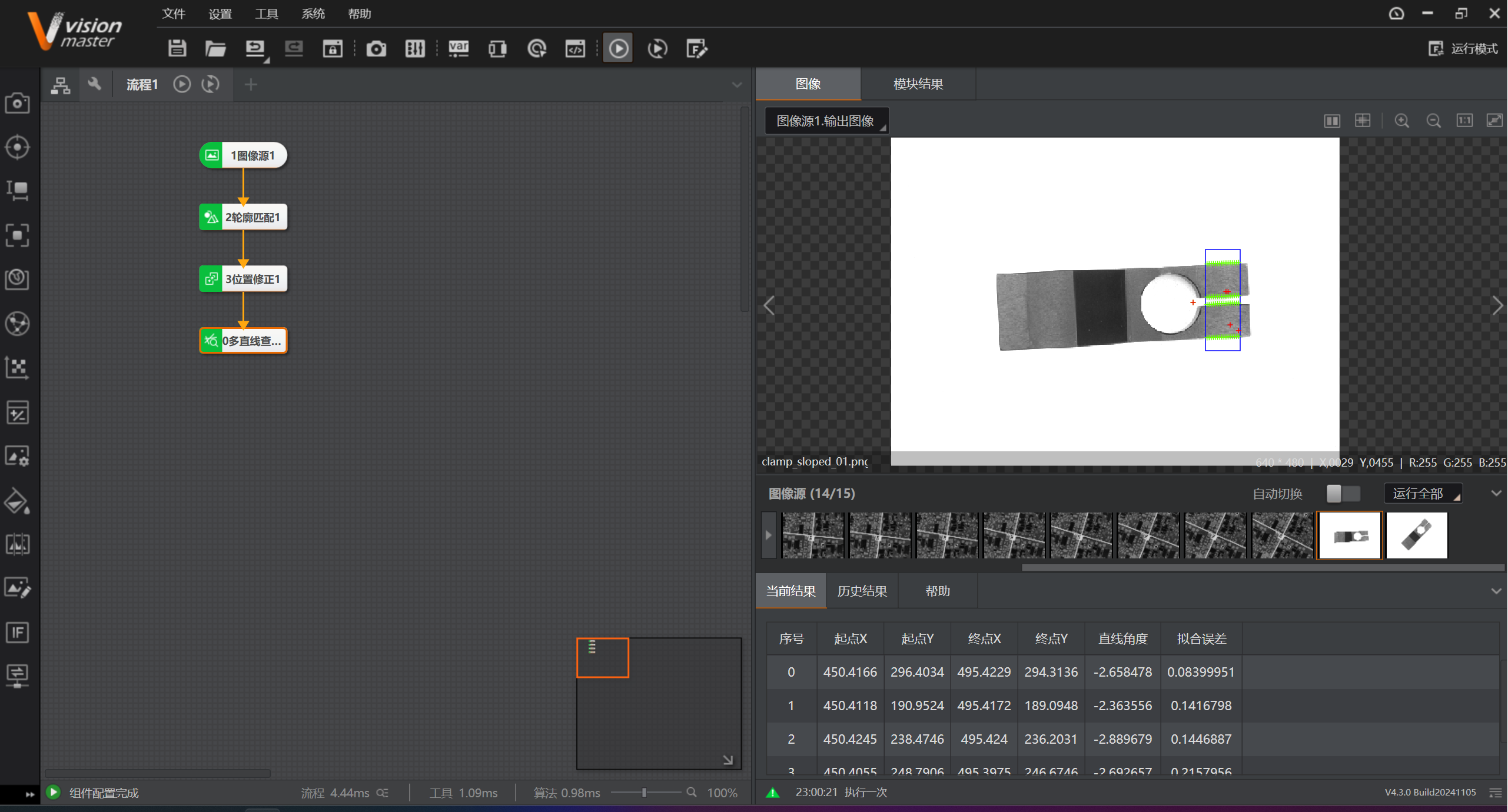
4:拖入直线查找模块

5:双击组件,开始设定参数
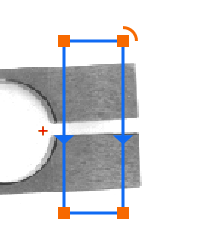
(1):首先得先画ROI: 在需要查找直线的区域画一个检测框,注意看框的上面的是有箭头的,那个箭头就是代表了边缘查找的方向
(2):然后开始设定参数

1):滤波核半宽:用于增强边缘和抑制噪声,最小值为1。当边缘模糊或有噪声干扰时,增大该值有利于使检测结果更加稳定
2):投影长度:决定用于梯度场投影的区域的数量。该值越小,允许工具更细的粒度来分析图像,但可能导致更长的算法耗时。该值越大,算法耗时越小,但可能导致边缘无法被检测出
3):绝对/相对边缘阈值:只有边缘梯度阈值大于提取阈值的边缘点才可被检测出
4):边缘极性:由黑到白、由白到黑、任意,这里的参数含义和边缘直线是一样的,参考上一节
5):边缘角度容忍:边缘点梯度方向与垂直于拟合直线的方向(拟合直线法线方向)的最大允许角度差
6):边缘距离容忍:边缘点与拟合线的最大允许距离
7):多线最大条数:设定能查找到的最大直线数量
8):覆盖率阈值:实际选用的边缘点数量占直线段理想使用的边缘点数量的最小百分比。该值越大,越倾向于输出覆盖率更高的直线段
9):旋转角度容忍:所发现的线段的旋转量与定义的梯度搜索方向的最大偏差。该值越低,检测出的线段与梯度搜索方向的平行度越高
10):拟合方式:拟合直线的使用拟合算法
上述解释参考了官方说明,其实看参数名词有点晦涩难懂,小伙伴实际上手训练就能很快速的理解各个参数的意思了
四:实测:上述设定好参数,开始实际测量看看效果