apollo系统车辆集成介绍(未完代续
文章目录
- 前言
- 一、电气架构拓扑详解
- 1、Expansion box 和Mini SAS HD
- 2 FPF-Link Camera和Fakra
- 二、
- 总结
前言
打算将apollo系统移植到实车上,整理下学习过程中遇到的问题以及解决思路
官方学习网址
一、电气架构拓扑详解
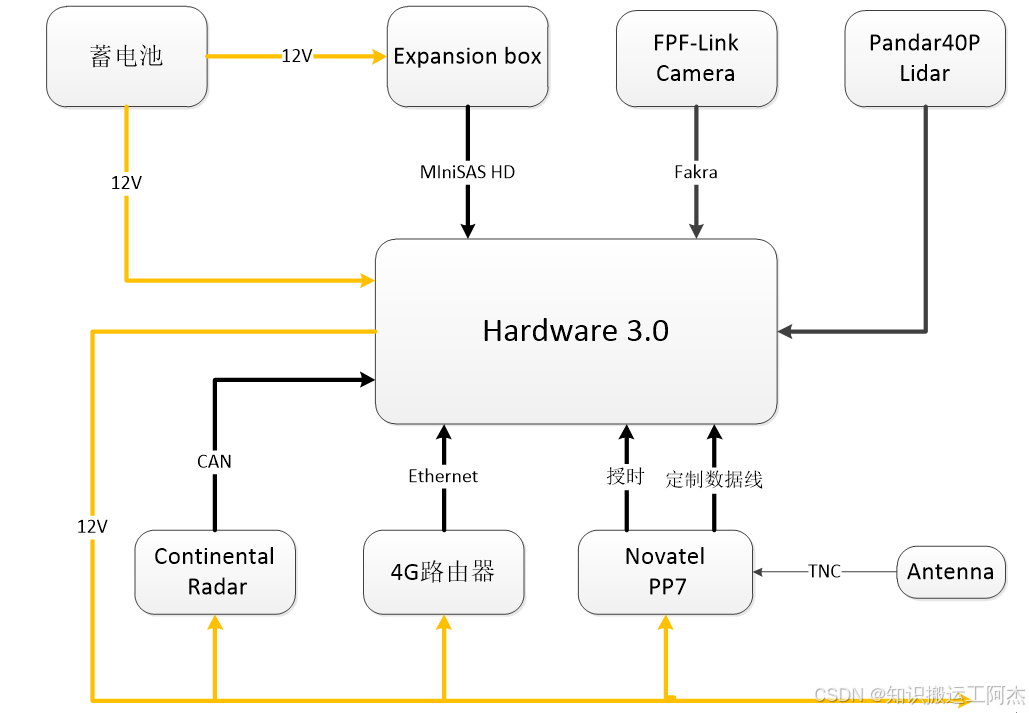
这个架构上好多信息不清楚 特意整理下
1、Expansion box 和Mini SAS HD
首先我连这个中文名是什么都不清楚,惭愧。百度了下,好象是扩展盒。
Expansion Box(EP)是Apollo自动驾驶车辆硬件系统中的一个重要组成部分,主要用于硬件扩展和集成安装。在Apollo自动驾驶车辆中,EP与其他传感器如激光雷达、惯性导航系统PP7、毫米波雷达和相机等进行集成安装。这些集成工作包括硬件和电气的集成安装,确保各个部件能够协同工作,实现自动驾驶功能12。
Expansion Box的具体功能和作用包括:
硬件扩展:EP提供了额外的硬件接口和功能,使得车辆可以集成更多的传感器和设备,增强车辆的感知和决策能力。
集成安装:EP与其他传感器和系统进行电气集成,确保数据的准确传输和处理,保证自动驾驶系统的稳定运行。
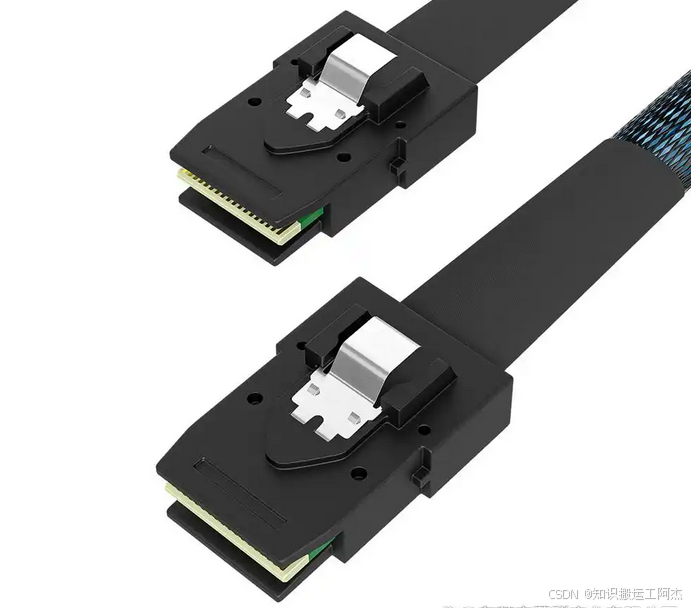
Mini SAS(Serial Attached SCSI,串行附属SCSI)接口是一种用于连接存储设备的接口标准,主要用于服务器和数据存储系统。它符合Mini-SAS 2.1规范,支持的数据传输速度通常在6-10Gb/s之间,并可支持最多4端口的SAS数据。Mini SAS接口采用较少的针脚数,如SFF-8087(内部连接器,36针)和SFF-8088(外部连接器,26针),这些特性使得它在中低端服务器和存储设备中得到了广泛应用。
Mini SAS HD则是高密度的Mini SAS连接器,如SFF-8643(内部连接器)和SFF-8644(外部连接器)。这些连接器采用更多的针脚数(均为36针),可以支持更高的数据传输速度和更多的通道。Mini SAS HD符合SAS 3.0规范,支持的数据传输速度高达12Gb/s,同样可以支持最多4端口的SAS数据。
2 FPF-Link Camera和Fakra
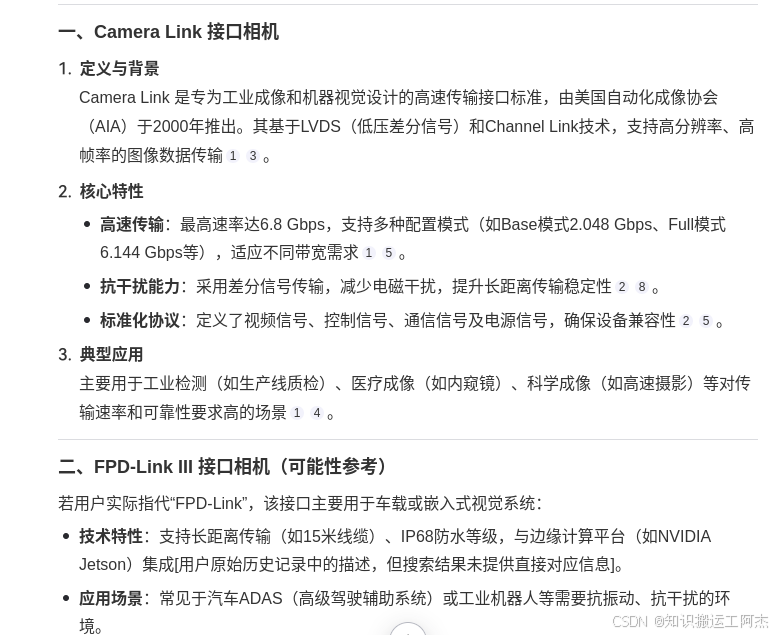
FPF没有搜到,不知道是不是写错了
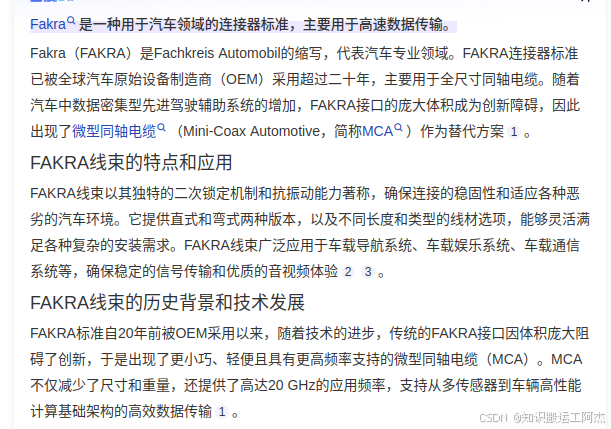
详细介绍
二、
总结
提示:这里对文章进行总结:
例如:以上就是今天要讲的内容,本文仅仅简单介绍了pandas的使用,而pandas提供了大量能使我们快速便捷地处理数据的函数和方法。