只做传统嫁衣网站百度指数官网首页
目录
1. 前言
2. MPC控制的基本原理
2.1 核心思想
2.2 优化问题
3. MPC控制示例:赛车控制
3.1 系统参数和动态模型
3.2 动态模型
3.3 优化问题
3.4 主模拟循环
3.5 结果可视化
3.6 完整代码
4. 总结
1. 前言
在工业控制领域,模型预测控制(MPC)是一种非常重要的控制策略。它通过利用系统的动态模型来预测未来的系统行为,并通过优化控制输入来实现期望的性能。MPC在处理复杂系统、多输入多输出系统以及具有约束条件的系统方面表现出色。本文将详细介绍MPC的基本原理,并通过一个具体的Python实例来展示如何实现MPC控制。
2. MPC控制的基本原理
2.1 核心思想
MPC的核心思想是在每个控制周期内,通过解决一个有限时间范围内的优化问题来确定未来的控制输入序列。具体来说,MPC在每个时间步长内:
-
使用系统的当前状态作为初始条件。
-
基于系统的动态模型,预测未来一段时间内的系统行为。
-
通过优化算法(如梯度下降、序列二次规划等)来寻找使性能指标最小化的控制输入序列。
-
将优化得到的第一个控制输入应用到实际系统中。
-
在下一个时间步长重复上述过程,形成滚动优化。
2.2 优化问题
MPC的优化问题通常可以表示为以下形式:
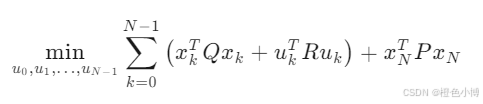
其中:
-
xk 是第 k 个时间步的状态向量。
-
uk 是第 k 个时间步的控制输入向量。
-
Q 和 R 是权重矩阵,用于平衡状态和控制输入的相对重要性。
-
P 是终端权重矩阵,用于处理终端状态的约束。
-
N 是预测和控制的时域长度。
约束条件通常包括:
-
状态约束:xmin≤xk≤xmax
-
控制输入约束:umin≤uk≤umax
-
系统动态约束:xk+1=f(xk,uk)
3. MPC控制示例:赛车控制
在这个示例中,我们将实现一个太阳能汽车的MPC控制器。汽车的速度和电池状态是状态变量,加速度是控制输入。目标是最小化完成20公里赛程所需的时间,同时满足速度和电池状态的约束。
3.1 系统参数和动态模型
import numpy as np
from scipy.optimize import minimize
import matplotlib.pyplot as plt# 系统参数
eta = 0.9 # 电机效率
C_rr = 0.01 # 滚动阻力系数
m = 500 # 车辆质量(kg)
g = 9.8 # 重力加速度(m/s²)
rho = 1.2 # 空气密度(kg/m³)
C_d = 0.15 # 阻力系数
A_ref = 1 # 参考面积(m²)
dx = 10 # 距离步长(m)
xfinal = 20000 # 赛程总长度(m)
xpreview = 500 # 预览距离(m)# 初始条件
v0 = 15 # 初始速度(m/s)
E_bat0 = 200000 # 初始电池电量(J)
x0 = 0 # 初始位置(m)
t0 = 0 # 初始时间(s)# MPC参数
Np = 50 # 预测时域
Nc = 50 # 控制时域
sim_steps = int(xfinal / dx) # 总模拟步数# 约束条件
v_min, v_max = 0, 30 # 速度范围(m/s)
E_bat_min, E_bat_max = 1000, 200000 # 电池电量范围(J)3.2 动态模型
def solar_profile(x):"""太阳能功率分布函数"""return 500 * np.sin(0.0005 * x) + 500def system_dynamics(state, a):"""系统动态模型"""global dxE_bat, v, t, x = stateP_sun = solar_profile(x)P_motor = eta * (0.5 * rho * C_d * A_ref * v**3 + C_rr * m * g * v)dE_bat = P_sun - P_motordv = adt = dx / v if v > 0 else 0dx = dxreturn [E_bat + dE_bat, v + dv, t + dt, x + dx]-
state:当前系统的状态,包含四个变量:-
E_bat:电池的剩余电量(单位:焦耳,J)。 -
v:当前速度(单位:米每秒,m/s)。 -
t:当前时间(单位:秒,s)。 -
x:当前位置(单位:米,m)。
-
-
a:当前的加速度(单位:米每二次方秒,m/s²),是外部输入的控制变量。
3.3 优化问题
def cost_function(a, X):"""MPC成本函数"""E_bat, v, t, x = Xt_start = tJ = 0for i in range(Np):X = system_dynamics(X, a[i])E_bat, v, t, x = XJ += 10 * a[i]**2 # 控制输入惩罚J += (t - t_start) # 时间惩罚return Jdef nlcon(a, X):"""非线性约束"""E_bat, v, t, x = Xc = []for i in range(Np):X = system_dynamics(X, a[i])E_bat, v, t, x = Xc.extend([v_min - v, v - v_max, E_bat_min - E_bat, E_bat - E_bat_max])return np.array(c)3.4 主模拟循环
# 主模拟循环
x_array = [x0]
v_array = [v0]
E_bat_array = [E_bat0]
t_array = [t0]
a_array = []for k in range(sim_steps - 1):X = np.array([E_bat_array[k], v_array[k], t_array[k], x_array[k]])a_init = np.zeros(Np) # 初始猜测bounds = [(-10, 10)] * Np # 控制输入范围cons = {'type': 'ineq', 'fun': lambda a: -nlcon(a, X)} # 非线性约束result = minimize(lambda a: cost_function(a, X), a_init, method='SLSQP', bounds=bounds, constraints=cons)a = result.x[0] # 只使用第一个控制输入# 更新状态X_next = system_dynamics(X, a)E_bat_array.append(X_next[0])v_array.append(X_next[1])t_array.append(X_next[2])x_array.append(X_next[3])a_array.append(a)# 如果到达终点,提前结束if x_array[-1] >= xfinal:break-
minimize:调用 SciPy 的优化函数,寻找使成本函数最小化的控制输入序列。-
lambda a: cost_function(a, X):目标函数,即成本函数。 -
a_init:初始猜测的控制输入序列。 -
method='SLSQP':使用序列二次规划(SLSQP)算法进行优化。 -
bounds:控制输入的边界条件。 -
constraints:非线性约束条件。
-
-
result:优化结果,包含最优的控制输入序列。
3.5 结果可视化
# 绘制结果
plt.figure(figsize=(12, 8))
plt.subplot(3, 1, 1)
plt.plot(np.array(x_array) / 1000, v_array)
plt.xlabel('Position (km)')
plt.ylabel('Velocity (m/s)')
plt.title('Velocity Profile')plt.subplot(3, 1, 2)
plt.plot(np.array(x_array) / 1000, np.array(E_bat_array) / 1000)
plt.xlabel('Position (km)')
plt.ylabel('Battery State of Charge (kJ)')
plt.title('Battery State of Charge')plt.subplot(3, 1, 3)
plt.plot(t_array, a_array)
plt.xlabel('Time (s)')
plt.ylabel('Acceleration (m/s²)')
plt.title('Acceleration Profile')plt.tight_layout()
plt.show()print(f"Race completion time: {t_array[-1]:.2f} seconds")3.6 完整代码
完整代码如下方便调试:
import numpy as np
from scipy.optimize import minimize
import matplotlib.pyplot as plt
from tqdm import tqdm# 系统参数
eta = 0.9 # 电机效率
C_rr = 0.01 # 滚动阻力系数
m = 500 # 车辆质量(kg)
g = 9.8 # 重力加速度(m/s²)
rho = 1.2 # 空气密度(kg/m³)
C_d = 0.15 # 阻力系数
A_ref = 1 # 参考面积(m²)
dx = 10 # 距离步长(m)
xfinal = 20000 # 赛程总长度(m)
xpreview = 500 # 预览距离(m)# 初始条件
v0 = 15 # 初始速度(m/s)
E_bat0 = 200000 # 初始电池电量(J)
x0 = 0 # 初始位置(m)
t0 = 0 # 初始时间(s)# MPC参数
Np = 50 # 预测时域
Nc = 50 # 控制时域
sim_steps = int(xfinal / dx) # 总模拟步数# 约束条件
v_min, v_max = 0, 30 # 速度范围(m/s)
E_bat_min, E_bat_max = 1000, 200000 # 电池电量范围(J)def solar_profile(x):"""太阳能功率分布函数"""return 500 * np.sin(0.0005 * x) + 500def system_dynamics(state, a):"""系统动态模型"""global dxE_bat, v, t, x = stateP_sun = solar_profile(x)P_motor = eta * (0.5 * rho * C_d * A_ref * v**3 + C_rr * m * g * v)dE_bat = P_sun - P_motordv = adt = dx / v if v > 0 else 0dx = dxreturn [E_bat + dE_bat, v + dv, t + dt, x + dx]def cost_function(a, X):"""MPC成本函数"""E_bat, v, t, x = Xt_start = tJ = 0for i in range(Np):X = system_dynamics(X, a[i])E_bat, v, t, x = XJ += 10 * a[i]**2 # 控制输入惩罚J += (t - t_start) # 时间惩罚return Jdef nlcon(a, X):"""非线性约束"""E_bat, v, t, x = Xc = []for i in range(Np):X = system_dynamics(X, a[i])E_bat, v, t, x = Xc.extend([v_min - v, v - v_max, E_bat_min - E_bat, E_bat - E_bat_max])return np.array(c)# 主模拟循环
x_array = [x0]
v_array = [v0]
E_bat_array = [E_bat0]
t_array = [t0]
a_array = []for k in tqdm(range(sim_steps - 1)):X = np.array([E_bat_array[k], v_array[k], t_array[k], x_array[k]])a_init = np.zeros(Np) # 初始猜测bounds = [(-10, 10)] * Np # 控制输入范围cons = {'type': 'ineq', 'fun': lambda a: -nlcon(a, X)} # 非线性约束result = minimize(lambda a: cost_function(a, X), a_init, method='SLSQP', bounds=bounds, constraints=cons)a = result.x[0] # 只使用第一个控制输入# 更新状态X_next = system_dynamics(X, a)E_bat_array.append(X_next[0])v_array.append(X_next[1])t_array.append(X_next[2])x_array.append(X_next[3])a_array.append(a)# 如果到达终点,提前结束if x_array[-1] >= xfinal:break# 绘制结果
plt.figure(figsize=(12, 8))
plt.subplot(3, 1, 1)
plt.plot(np.array(x_array) / 1000, v_array)
plt.xlabel('Position (km)')
plt.ylabel('Velocity (m/s)')
plt.title('Velocity Profile')plt.subplot(3, 1, 2)
plt.plot(np.array(x_array) / 1000, np.array(E_bat_array) / 1000)
plt.xlabel('Position (km)')
plt.ylabel('Battery State of Charge (kJ)')
plt.title('Battery State of Charge')plt.subplot(3, 1, 3)
t_array.pop(0)
plt.plot(t_array, a_array)
plt.xlabel('Time (s)')
plt.ylabel('Acceleration (m/s²)')
plt.title('Acceleration Profile')plt.tight_layout()
plt.show()print(f"Race completion time: {t_array[-1]:.2f} seconds")当然因为损失函数设置问题,优化效果一般,仅作学习示例。
4. 总结
MPC是一种强大的控制策略,特别适用于处理复杂的动态系统和具有约束条件的系统。通过预测未来的系统行为并优化控制输入,MPC能够在满足约束的同时实现期望的性能。本文通过一个太阳能汽车的MPC控制实例,详细介绍了MPC的基本原理和Python实现。希望本文能够帮助大家更好地理解和应用MPC控制技术。我是橙色小博,关注我,在人工智能领域一起学习进步!