wordpress importseo的优点有哪些
六、预定时间滑模控制(Predefined-Time Sliding Mode Control, PTSMC)
由于固定时间收敛系统的收敛时间上界很多需要经过对系统参数的复杂运算才能确定,并不能通过对系统参数的较为简单运算直接确定,这在为系统做参数选择时就造成了极大的困难,而为了解决这一问题,定义了预定时间稳定系统,其特点为系统的收敛时间上界可以由系统中的某些显式参数来直接确定,而其他与收敛时间无关的参数又可以用来调节系统收敛过程中的动态表现。
6.1、定义
针对上述系统,考虑候选李雅普诺夫函数满足如下条件:存在一个连续可微的正定函数 V ( x ) V(x) V(x),使得对于预定时间 T p T_p Tp,以下不等式成立:
V ˙ ( x ) ≤ − π 2 T p λ ( 1 k V 1 − λ ( x ) + k V 1 + λ ( x ) ) , ∀ x ∈ D ∖ { 0 } \dot{V}(x) \leq -\frac{\pi}{2 T_p \lambda} \left( \frac{1}{k} V^{1 - \lambda}(x) + k V^{1+\lambda}(x) \right), \quad \forall x \in \mathcal{D} \setminus \{0\} V˙(x)≤−2Tpλπ(k1V1−λ(x)+kV1+λ(x)),∀x∈D∖{0}
T p > 0 T_p > 0 Tp>0, 1 < λ < 2 1 < \lambda < 2 1<λ<2 为系统参数,则系统是全局预定时间稳定的,且收敛时间满足 s u p x 0 ∈ R T ( x 0 ) = T p sup_{x_0 \in \mathcal{R}} T(x_0) = T_p supx0∈RT(x0)=Tp
证明:
设定一个新的标量系统:
x ˙ ≤ − π 2 T p λ ( 1 k x 1 − λ + k x 1 + λ ) \dot x \leq -\frac{\pi}{2 T_p \lambda} \left( \frac{1}{k} x^{1 - \lambda} + k x ^ {1+\lambda} \right) x˙≤−2Tpλπ(k1x1−λ+kx1+λ)
设 V = x 2 V=x^2 V=x2,对 V V V 求导可得:
V ˙ = 2 x x ˙ = − x π 2 T p λ ( 1 k ⌈ x ⌋ 1 − λ + k ⌈ x ⌋ 1 + λ ) = − π 2 T p λ ( 1 k ⌈ x ⌋ 2 − λ + k ⌈ x ⌋ 2 + λ ) = − π T p λ ( 1 k ( x 2 ) 1 − 1 2 λ + k ( x 2 ) 1 + 1 2 λ ) = − π T p λ ( 1 k ( V ) 1 − 1 2 λ + k ( V ) 1 + 1 2 λ ) \begin{aligned} \dot V &= 2 x \dot x \\ &= - x \frac{\pi}{2 T_p \lambda} \left( \frac{1}{k} \lceil x \rfloor^{1 - \lambda} + k \lceil x \rfloor^{1+\lambda} \right) \\ &= - \frac{\pi}{2 T_p \lambda} \left( \frac{1}{k} \lceil x \rfloor^{2-\lambda} + k \lceil x \rfloor^{2+\lambda} \right) \\ &= - \frac{\pi}{ T_p \lambda} \left( \frac{1}{k} (x^2)^{1-\frac{1}{2}\lambda} + k (x^2)^{1+\frac{1}{2}\lambda} \right) \\ &= - \frac{\pi}{ T_p \lambda} \left( \frac{1}{k} (V)^{1-\frac{1}{2}\lambda} + k (V)^{1+\frac{1}{2}\lambda} \right) \\ \end{aligned} V˙=2xx˙=−x2Tpλπ(k1⌈x⌋1−λ+k⌈x⌋1+λ)=−2Tpλπ(k1⌈x⌋2−λ+k⌈x⌋2+λ)=−Tpλπ(k1(x2)1−21λ+k(x2)1+21λ)=−Tpλπ(k1(V)1−21λ+k(V)1+21λ)
进一步得:
− k V λ 2 − 1 1 + k 2 V λ d V = π T p λ d t ∫ V ( 0 ) V ( x 0 ) − k V λ 2 − 1 1 + k 2 V λ d V = ∫ 0 T ( x 0 ) π T p λ d t 2 λ arctan ( ( k 2 λ V ) λ 2 ) ∣ V ( 0 ) V ( x 0 ) = π t T p λ ∣ 0 T ( x 0 ) \begin{aligned} \frac{-k V^{\frac{\lambda}{2} - 1}}{1 + k^2 V^\lambda} d V &= \frac{\pi}{T_p \lambda} dt \\ \int_{V(0)}^{V(x_0)} \frac{-k V^{\frac{\lambda}{2} - 1}}{1 + k^2 V^\lambda} d V &= \int_{0}^{T(x_0)} \frac{\pi}{T_p \lambda} dt \\ \frac{2}{\lambda} \arctan\left( (k^{\frac{2}{\lambda}}V)^{\frac{\lambda}{2}} \right) \bigg|_{V(0)}^{V(x_0)} &= \frac{\pi t}{T_p \lambda} \bigg|_{0}^{T(x_0)} \end{aligned} 1+k2Vλ−kV2λ−1dV∫V(0)V(x0)1+k2Vλ−kV2λ−1dVλ2arctan((kλ2V)2λ) V(0)V(x0)=Tpλπdt=∫0T(x0)Tpλπdt=Tpλπt 0T(x0)
进而可得系统收敛到原点的时间为:
T ( x 0 ) = 2 T p π arctan ( k V λ 2 ( x 0 ) ) T(x_0) = \frac{2 T_p}{\pi} \arctan\left(k V^{\frac{\lambda}{2}}(x_0)\right) T(x0)=π2Tparctan(kV2λ(x0))
可得系统收敛时间满足:
s u p x 0 ∈ R T ( x 0 ) = T p sup_{x_0 \in \mathcal{R}} T(x_0) = T_p supx0∈RT(x0)=Tp
证明完毕
6.2、示例
这次针对的系统还不变,固定时间时间收敛的滑模面可以定义为:
s = x 2 + π 2 T p λ ( 1 k ⌈ x 1 ⌋ 1 − λ + k ⌈ x 1 ⌋ 1 + λ ) s = x_2 + \frac{\pi}{2 T_p \lambda} \left( \frac{1}{k} \lceil x_1 \rfloor^{1-\lambda} + k \lceil x_1 \rfloor^{1+\lambda} \right) s=x2+2Tpλπ(k1⌈x1⌋1−λ+k⌈x1⌋1+λ)
据此可以设计控制律 u u u :
u = − x 1 2 − x 2 − π 2 T p λ ( 1 k ( 1 − λ ) ⌈ x 1 ⌋ − λ x 2 + k ( 1 + λ ) ⌈ x 1 ⌋ λ x 2 ) − π 2 T p λ ( 1 k ⌈ s ⌋ − λ + k ⌈ s ⌋ λ ) u = -x_1^2 - x_2 - \frac{\pi}{2 T_p \lambda}\left( \frac{1}{k}(1-\lambda) \lceil x_1 \rfloor^{-\lambda}x_2 + k (1+\lambda) \lceil x_1 \rfloor^{\lambda} x_2 \right) - \frac{\pi}{2 T_p \lambda} \left( \frac{1}{k} \lceil s \rfloor^{-\lambda} + k \lceil s \rfloor^{\lambda} \right) u=−x12−x2−2Tpλπ(k1(1−λ)⌈x1⌋−λx2+k(1+λ)⌈x1⌋λx2)−2Tpλπ(k1⌈s⌋−λ+k⌈s⌋λ)
首先证明滑模面可以在预定时间内收敛到零,设置李雅普诺夫函数 V 1 ( s ) = 1 2 s 2 V_1(s) = \frac{1}{2} s^2 V1(s)=21s2
V 1 ( s ) = s s ˙ = s ( x ˙ 2 + π 2 T p λ ( 1 k ( 1 − λ ) ⌈ x 1 ⌋ − λ x 2 + k ( 1 + λ ) ⌈ x 1 ⌋ λ x 2 ) ) = s ( x 1 2 + x 2 + u + π 2 T p λ ( 1 k ( 1 − λ ) ⌈ x 1 ⌋ − λ x 2 + k ( 1 + λ ) ⌈ x 1 ⌋ λ x 2 ) ) = s ( − π 2 T p λ ( 1 k ⌈ s ⌋ − λ + k ⌈ s ⌋ λ ) ) = − π 2 T p λ ( 1 k ⌈ s ⌋ 1 − λ + k ⌈ s ⌋ 1 + λ ) \begin{aligned} V_1(s) &= s \dot s \\ &= s\left( \dot x_2 + \frac{\pi}{2 T_p \lambda}\left( \frac{1}{k}(1-\lambda) \lceil x_1 \rfloor^{-\lambda}x_2 + k (1+\lambda) \lceil x_1 \rfloor^{\lambda} x_2 \right) \right) \\ &= s\left( x_1^2 + x_2 + u + \frac{\pi}{2 T_p \lambda}\left( \frac{1}{k}(1-\lambda) \lceil x_1 \rfloor^{-\lambda}x_2 + k (1+\lambda) \lceil x_1 \rfloor^{\lambda} x_2 \right)\right) \\ &= s\left( - \frac{\pi}{2 T_p \lambda} \left( \frac{1}{k} \lceil s \rfloor^{-\lambda} + k \lceil s \rfloor^{\lambda} \right) \right) \\ &= - \frac{\pi}{2 T_p \lambda} \left( \frac{1}{k} \lceil s \rfloor^{1 -\lambda} + k \lceil s \rfloor^{1 + \lambda} \right) \end{aligned} V1(s)=ss˙=s(x˙2+2Tpλπ(k1(1−λ)⌈x1⌋−λx2+k(1+λ)⌈x1⌋λx2))=s(x12+x2+u+2Tpλπ(k1(1−λ)⌈x1⌋−λx2+k(1+λ)⌈x1⌋λx2))=s(−2Tpλπ(k1⌈s⌋−λ+k⌈s⌋λ))=−2Tpλπ(k1⌈s⌋1−λ+k⌈s⌋1+λ)
证明可知,滑模面可以在预定时间 T p T_p Tp 内收敛到零。接着证明滑模面为零时,系统状态也可以在预定时间内收敛到零。首先设置李雅普诺夫函数 V 2 ( x 1 ) = 1 2 x 1 2 V_2(x_1) = \frac{1}{2} x_1^2 V2(x1)=21x12
V 2 ( x 1 ) = x 1 x 2 = x 1 ( − π 2 T p λ ( 1 k ⌈ x 1 ⌋ 1 − λ + k ⌈ x 1 ⌋ 1 + λ ) ) = − π 2 T p λ ( 1 k ∣ x 1 ∣ 2 − λ + k ∣ x 1 ∣ 2 + λ ) = − π 2 T p λ ( 1 k ( 2 V 2 ) 1 − 1 2 λ + k ( 2 V 2 ) 1 + 1 2 λ ) \begin{aligned} V_2(x_1) &= x_1 x_2 \\ & = x_1 \left(- \frac{\pi}{2 T_p \lambda} \left( \frac{1}{k} \lceil x_1 \rfloor^{1-\lambda} + k \lceil x_1 \rfloor^{1+\lambda} \right)\right) \\ & = - \frac{\pi}{2 T_p \lambda} \left( \frac{1}{k} | x_1 |^{2-\lambda} + k | x_1 |^{2+\lambda} \right) \\ & = - \frac{\pi}{2 T_p \lambda} \left( \frac{1}{k} (2V_2)^{1-\frac{1}{2}\lambda} + k (2V_2) ^{1+\frac{1}{2}\lambda} \right) \\ \end{aligned} V2(x1)=x1x2=x1(−2Tpλπ(k1⌈x1⌋1−λ+k⌈x1⌋1+λ))=−2Tpλπ(k1∣x1∣2−λ+k∣x1∣2+λ)=−2Tpλπ(k1(2V2)1−21λ+k(2V2)1+21λ)
证明可知,系统状态也可以在滑模面为零时在预定时间 T p T_p Tp 后收敛到零。
6.2.2、代码:
x_1 = zeros(1, 1e5);
x_2 = zeros(1, 1e5);
u = zeros(1, 1e5);
s = zeros(1, 1e5);% 初始化
x_1(1, 1) = 100;
x_2(1, 1) = -10;
dt = 1e-3;% 控制器参数
T_p = 10;
lambda = 0.5;
k = 10; for i = 1:(1e5-1)% 计算控制量s(1,i) = x_2(1,i) + (1/k)*abs(x_1(1,i))^(1-lambda)*sign(x_1(1,i)) + k*abs(x_1(1,i))^(1+lambda)*sign(x_1(1,i));term1 = -x_1(1,i)^2 - x_2(1,i);term2_part1 = (1/k)*(1-lambda)*abs(x_1(1,i))^(-lambda)*x_2(1,i);term2_part2 = k*(1+lambda)*abs(x_1(1,i))^lambda*x_2(1,i);term2 = -(pi/(2*T_p*lambda)) * (term2_part1 + term2_part2);term3_part1 = (1/k)*abs(s(1,i))^(-lambda)*sign(s(1,i));term3_part2 = k*abs(s(1,i))^lambda*sign(s(1,i));term3 = -(pi/(2*T_p*lambda)) * (term3_part1 + term3_part2);u(1,i) = term1 + term2 + term3;% 计算微分dx_1 = x_2(1,i);dx_2 = x_1(1,i)^2 + x_2(1,i) + u(1,i);% 更新状态量,为了简单直接采用欧拉法x_1(1, i+1) = x_1(1, i) + dx_1 .* dt;x_2(1, i+1) = x_2(1, i) + dx_2 .* dt;
end
6.2.1、绘图:
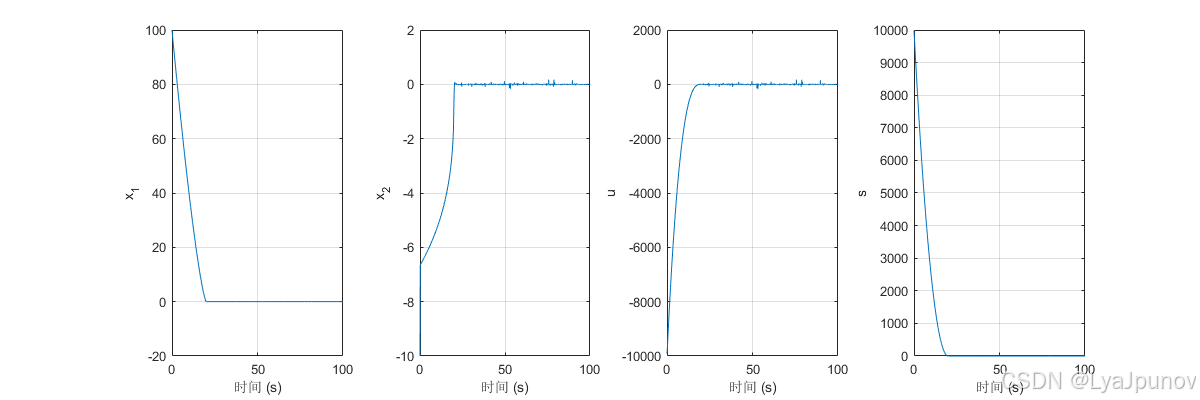
可以发现它在20s的时候可以保持稳定,但是后续并不那么光滑,这是符合我们的预期的。
参考文献
[1] Z. Zhu, Y. Xia, M. Fu. Attitude stabilization of rigid spacecraft with finite‐time convergence. International Journal of Robust and Nonlinear Control, 2011, 21(6): 686– 702
[2] A. Polyakov. Nonlinear Feedback Design for Fixed-Time Stabilization of Linear Control Systems. IEEE Transactions on Automatic Control, 2012, 57(8): 2106–2110
[3] Z. Zuo. Nonsingular fixed-time consensus tracking for second-order multi-agent networks. Automatica, 2015, 54: 305–309
[4] Z. Zuo, Q.-L. Han, and B. Ning, Fixed-Time Cooperative Control of Multi-Agent Systems. Cham: Springer International Publishing, 2019.
[5] E. Moulay, V. Lechappe, E. Bernuau, and F. Plestan, Robust Fixed-Time Stability: Application to Sliding-Mode Control, IEEE Trans. Automat. Contr, vol. 67, no. 2, pp. 1061–1066, Feb. 2022