站长工具在线企查查企业信息查询网
基于51单片机液位控制器
(仿真+程序+原理图+PCB+设计报告)
功能介绍
具体功能:
1.使用HC-SR04测量液位,LCD1602显示;
2.当水位高于设定上限的时候,对应声光报警报警,继电器控制水泵停止加水;
3.当水位低于设定上限的时候,对应声光报警报警,继电器控制水泵开始加水;
4.按键可以设置液位上下限;
演示视频:
基于51单片机的超声波液位测量与控制系统

程序
/***************************************************************
基于51单片机的超声波水位监测报警系统
具体水泵控制和排水控制
***微信公众号:木子单片机****
***************************************************************/
#include <reg52.h>
#include <intrins.h> // 包含循环移位:_cror_
#include "main.h"
//----------------------------------------------------------------------uchar code TabNumASCII[10] = {'0','1','2','3','4','5','6','7','8','9'};bool g_flag = isNo; //用于标记超时(65.536ms)
bool g_flag05s = isNo; //用于标记0.52秒
uchar ucCount = 0; //用于计数0.52秒 uint uiH = 80; //设定的最高报警水位 H
uint uiL = 30; //设定的最低报警水位 L
uint uiD = 100; //检测探头到水库底部的距离 D bool g_flagSwitch = isNo; //控制阀门连续开启间隔延时(保护)标志
bool g_flagBeepTimer = isNo; //定时提醒标志//-----------------------------------------------------------------------
// 延时10us
void delay10us(void) //@12MHz
{unsigned char i;_nop_();i = 2;while (--i);
}// 延时100us
void delay100us(void) //@12MHz
{uchar i;_nop_();i = 47;while (--i);
}// 延时125us
void delay125us(void) //@12MHz
{unsigned char i;i = 60;while (--i);
}// 延时5ms
void delay5ms(void) //@12.000MHz
{unsigned char i, j;i = 10;j = 183;do{while (--j);} while (--i);
}// 延时500ms
void delay500ms(void) //@12MHz
{unsigned char i, j, k;_nop_();i = 4;j = 205;k = 187;do{do{while (--k);} while (--j);} while (--i);
}//-----------------------------------------------------------------------
//初始化IO端口
void initIO(void)
{P0 = 0xff;P1 = 0xff;P2 = 0xff;P3 = 0xff;
}// 初始化定时器0,定时器时钟12T模式 模式1,16位 @12.000MHz
void initTimer0(void)
{TMOD &= 0xF0; //设置定时器模式TMOD |= 0x01; //设置定时器模式TL0 = 0; //定时器初值清零TH0 = 0; //定时器初值清零//TR0 = 1; //开定时器0ET0 = 1; //开定时器0中断EA = 1; //开总中断 }// 初始化定时器1,定时器时钟12T模式 模式1,16位 @12.000MHz
void initTimer1(void) //50毫秒@12.000MHz
{ TMOD &= 0x0F; //设置定时器模式TMOD |= 0x10; //设置定时器模式TL1 = 0xB0; //设置定时初值TH1 = 0x3C; //设置定时初值 TR1 = 1; //定时器1开始计时ET1 = 1; //开定时器0中断
}//-----------------------------------------------------------------------
//定时器0中断
void zd0(void) interrupt 1
{g_flag = isYes; //中断溢出标志,g_flag = isYes超过测距范围if(++ucCount >= 8){ucCount = 0;g_flag05s = isYes; //g_flag05s = isYes定时0.52秒到,用于测量周期延时}TL0 = 0; //设置定时初值TH0 = 0; //设置定时初值}//定时器1中断 定时50ms
void tm1_isr() interrupt 3 using 1
{static uchar count = DATA_switchTime; //50ms的200倍 = 10Sstatic uchar uiCount = 1200; // = 1分钟 static uint uiCount_BeepTimer = DATA_BeepTimer;TL1 = 0xB0; //设置定时初值TH1 = 0x3C; //设置定时初值if (g_flagSwitch == isNo){if (count-- == 0) //50ms * 200 -> 10s{count = DATA_switchTime;g_flagSwitch = isYes;// TR1 = 0;}} if(g_flagBeepTimer == isNo){if (uiCount-- == 0) //= 1分钟{uiCount = 1200;if(uiCount_BeepTimer-- == 0){uiCount_BeepTimer = DATA_BeepTimer; g_flagBeepTimer = isYes;// TR1 = 0;} }}
}//-----------------------------------------------//外部中断1
void exint1() interrupt 2
{EX1 = 0; //关闭当前中断TR0 = 0; //关闭时器0}
//-----------------------------------------------------------------------//读LCD忙状态并等待忙状态结束
void LCD_waitNotBusy(void)
{IO_LCD_Data = 0xFF; io_LCD_RS = 0;io_LCD_RW = 1;io_LCD_E = 0;_nop_();_nop_();io_LCD_E = 1;while(IO_LCD_Data & 0x80); //检测如果是忙信号,一直等到不忙
}//给LCD写指令
void LCDWriteCommand(uchar command,bool ifReadBusy) //ifReadBusy = 1 时先进行忙检测
{if (ifReadBusy == isReadBusy) LCD_waitNotBusy(); //根据需要检测忙IO_LCD_Data = command;io_LCD_RS = 0;io_LCD_RW = 0; io_LCD_E = 0;_nop_();_nop_();io_LCD_E = 1;
}//给LCD写数据
void LCDWriteData(uchar dat)
{LCD_waitNotBusy(); //等到不忙IO_LCD_Data = dat;io_LCD_RS = 1;io_LCD_RW = 0;io_LCD_E = 0; _nop_();_nop_();io_LCD_E = 1;
}// 初始化LCD1602液晶显示屏
void initLCD1602(void)
{uchar i; IO_LCD_Data = 0; // 数据端口清零for(i = 0; i < 3; i++) // 设置三次显示模式{LCDWriteCommand(0x38,isNotReadBusy); // 不检测忙信号delay5ms();}LCDWriteCommand(0x38,isReadBusy); // 设置显示模式,检测忙信号LCDWriteCommand(0x08,isReadBusy); // 关闭显示LCDWriteCommand(0x01,isReadBusy); // 显示清屏LCDWriteCommand(0x06,isReadBusy); // 显示光标移动设置LCDWriteCommand(0x0F,isReadBusy); // 显示开及光标设置
}//按指定位置显示一个字符
void putOneCharToLCD1602(uchar line, uchar position, uchar ucData)
{line &= DATA_LineMax;position &= DATA_PositionMax;if (line == DATA_LineTow) position |= 0x40; //当要显示第二行时地址码+0x40;position |= 0x80; //设置两行显示格式 D7 = 1;LCDWriteCommand(position, isReadBusy); //发送命令 设置字符地址LCDWriteData(ucData); //写入字符的数据
}//按指定位置显示一串字符
void putLineCharsToLCD1602(uchar line, uchar position, uchar count, uchar code *ucData)
{uchar i;for(i = 0; i < count; i++) //连续显示单个字符{putOneCharToLCD1602(line, position + i, ucData[i]); }
}//按指定位置连续显示三个字符(三位数字)
void putThreeCharToLCD1602(uchar line, uchar position, uint uiNumber)
{uiNumber %= 1000;putOneCharToLCD1602(line, position, TabNumASCII[uiNumber / 100]);putOneCharToLCD1602(line, ++position, TabNumASCII[uiNumber % 100 / 10]);putOneCharToLCD1602(line, ++position, TabNumASCII[uiNumber % 100 % 10]); }// 按键检测子程序,有键按下返回键端口数据,无键返回0
uchar GetKey(void)
{ uchar KeyTemp = (IO_KEY | DATA_KEY_ORL); //获取按键端口数据 if( KeyTemp != DATA_KEY_Null ) // 如果不为空{uchar CountTemp = 0;do{delay125us();if(KeyTemp != (IO_KEY | DATA_KEY_ORL)) return 0; //在延时期间检测键,如果不稳定保持则退出 } while(++CountTemp > Data_Key20msCountMax); // 延时20ms去抖动 while((IO_KEY | DATA_KEY_ORL) != DATA_KEY_Null); //等键释放 return KeyTemp; // 有键按下返回键端口数据}return 0; // 无有效键返回0
}//加一
uchar INC_Number(uchar Number, uchar Min, uchar Max)
{if(Number >= Max) return Min; else return (++ Number);}//减一
uchar DEC_Number(uchar Number, uchar Min, uchar Max)
{if(Number <= Min) return Max; else return (-- Number);}// 检测到有按键后 这里执行按键任务
void execute_key_task(uchar ucKeyValue)
{uchar state = 0; //定义调整数据的状态变量uchar keyValue = 0; //定义键值的临时变量if(ucKeyValue != DATA_KEY_Set) return; //不是设置键退出//是设置键继续-----------------------------------------------------putLineCharsToLCD1602(lineTow, 8, 8, "C:000cm "); //清零显示当前距离CURRENT putThreeCharToLCD1602(lineOne, 8 + 2, uiD); //光标调整到调整总距离(检测探头到水库底部的距离“D:000cm”) while(1){keyValue = GetKey(); if(keyValue == 0) continue;switch(keyValue){case DATA_KEY_Set:{// 如果按的是设置键,顺序设置总距离D——高水位H——低水位L——退出switch(state){case 0: // 如果是设置总距离状态,改变为设置高水位状态,并显示高水位,实现移动光标到高水位后面{state = 1; putThreeCharToLCD1602(lineOne, 0 + 2, uiH); }break;case 1:{uchar tempMax = uiD - DATA_uiD_Min;if(tempMax < 2 + 2) tempMax = 2 + 2; if(uiH > tempMax) {uiH = tempMax;putThreeCharToLCD1602(lineOne, 0 + 2, uiH);}else if(uiH < 2 + 2){uiH = 2 + 2; putThreeCharToLCD1602(lineOne, 0 + 2, uiH);} state = 2;putThreeCharToLCD1602(lineTow, 0 + 2, uiL);}break;case 2:{if(uiL > uiH - 2) {uiL = uiH - 2;putThreeCharToLCD1602(lineTow, 0 + 2, uiL);}return; }break;}}break;// 如果按的是增加键,改变相应数据并显示case DATA_KEY_INC:{switch(state){case 0:{uiD = INC_Number(uiD, DATA_uiD_Min, DATA_uiD_Max);putThreeCharToLCD1602(lineOne, 8 + 2, uiD); }break;case 1:{uchar tempMax = uiD - DATA_uiD_Min;if(tempMax < 2 + 2) tempMax = 2 + 2;uiH = INC_Number(uiH, 2, tempMax); putThreeCharToLCD1602(lineOne, 0 + 2, uiH); }break;case 2:{uiL = INC_Number(uiL, 0, uiH - 2); putThreeCharToLCD1602(lineTow, 0 + 2, uiL); }break;}}break;// 如果按的是减少键,改变相应数据并显示case DATA_KEY_DEC:{switch(state){case 0:{uiD = DEC_Number(uiD, DATA_uiD_Min, DATA_uiD_Max); putThreeCharToLCD1602(lineOne, 8 + 2, uiD);}break;case 1:{uchar tempMax = uiD - DATA_uiD_Min;if(tempMax < 2 + 2) tempMax = 2 + 2;uiH = DEC_Number(uiH, 2, tempMax); putThreeCharToLCD1602(lineOne, 0 + 2, uiH); }break;case 2:{uiL = DEC_Number(uiL, 0, uiH - 2); putThreeCharToLCD1602(lineTow, 0 + 2, uiL); }break;}}break;}}}// 蜂鸣器
void buzzerCall(void)
{uchar i;for(i = 0; i < 90; i++){io_Buzzer = 0;delay100us();io_Buzzer = 1;delay100us();delay100us(); }delay100us(); delay100us();
}//计算水位
bool CalculatedWaterLevel(void)
{uchar i = 8 + 2; //当前水位的数字在LCD屏显示的起点位置uint uiTime; //声波传播时间ulong ulDis; //实时测量到距离 uiTime = TH0 << 8 | TL0; ulDis = (uiTime * 3.40) / 200; //计算当前测量的距离,单位cmTH0 = 0;TL0 = 0; if((ulDis > uiD) || (g_flag == isYes )) // ulDis > uiD 超出测量范围;g_flag == isYes超时;{ g_flag = isNo; TR0 = 0;putLineCharsToLCD1602(lineTow, i, 3, "Err"); // 显示Err //阀门动作: // if(g_flagSwitch == isYes)// { // io_Control_Inlet = isio_Control_Inlet_OFF; // io_Control_Outlet = isio_Control_Outlet_ON;// g_flagSwitch = isNo;// } //指示灯:ioLed_Red = ! ioLed_Red; // 三个灯同时快速闪亮ioLed_Green = ! ioLed_Green;ioLed_Yellow = ! ioLed_Yellow;// 蜂鸣器叫: if(buzzerCallFlag == isCall){buzzerCall(); // 蜂鸣器叫 }return isNo; // 返回错误信息}else{ulDis = uiD - ulDis; // 当前水位C = 总距离 - 当前检测到的距离if(ulDis > uiH) // 如果水位超高{//阀门动作:io_Control_Inlet = isio_Control_Inlet_OFF;io_Control_Outlet = isio_Control_Outlet_ON; g_flagSwitch = isNo;//指示灯:ioLed_Red = ! ioLed_Red; // 红灯闪ioLed_Green = isLedOFF; ioLed_Yellow = isLedOFF; // 蜂鸣器叫:if(ulDis - uiH > (uiD - uiH) / DATA_alarmCoefficient) //当“当前水位”超出最高水位“ ((“总高度减高水位)除以2的值”)时报警{buzzerCall(); // 蜂鸣器叫}}else if(ulDis < uiL) // 如果水位超低{//阀门动作: if(g_flagSwitch == isYes){ io_Control_Outlet = isio_Control_Outlet_OFF; io_Control_Inlet = isio_Control_Inlet_ON; g_flagSwitch = isNo;} //指示灯:ioLed_Red = isLedOFF;ioLed_Green = isLedOFF;ioLed_Yellow = ! ioLed_Yellow; //黄灯闪// 蜂鸣器叫: if( uiL - ulDis > uiL / DATA_alarmCoefficient)//uiL / 2 当“当前水位”低于“低水位” “低水位除以2的值”时报警{buzzerCall(); // 蜂鸣器叫}
****/*完整资料
***//***微信公众号:木子单片机**** }else // 水位在正常范围 { ioLed_Red = isLedOFF;ioLed_Green = ! ioLed_Green;ioLed_Yellow = isLedOFF; }putThreeCharToLCD1602(lineTow, i, ulDis);return isYes; }return isYes;
}
硬件设计
使用元器件:
单片机:STC89C51;
(注意:单片机是通用的,无论51还是52、无论stc还是at都一样,引脚功能都一样。程序也是一样的。)
9*15万用板;超声波模块;
40脚IC座;4脚排针;
杜邦线;继电器;
LCD1602液晶;103电位器;
USB电源线(电池盒);
16脚IC座;16脚排针;
蜂鸣器;8550三极管;
1k电阻;10k电阻;
10uf电容;30pf电容;
12M晶振;3mmLED;
轻触按键;自锁开关;
DC电源插口;
直流水泵;
导线:若干;
 添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
结构框图:
 添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
设计资料
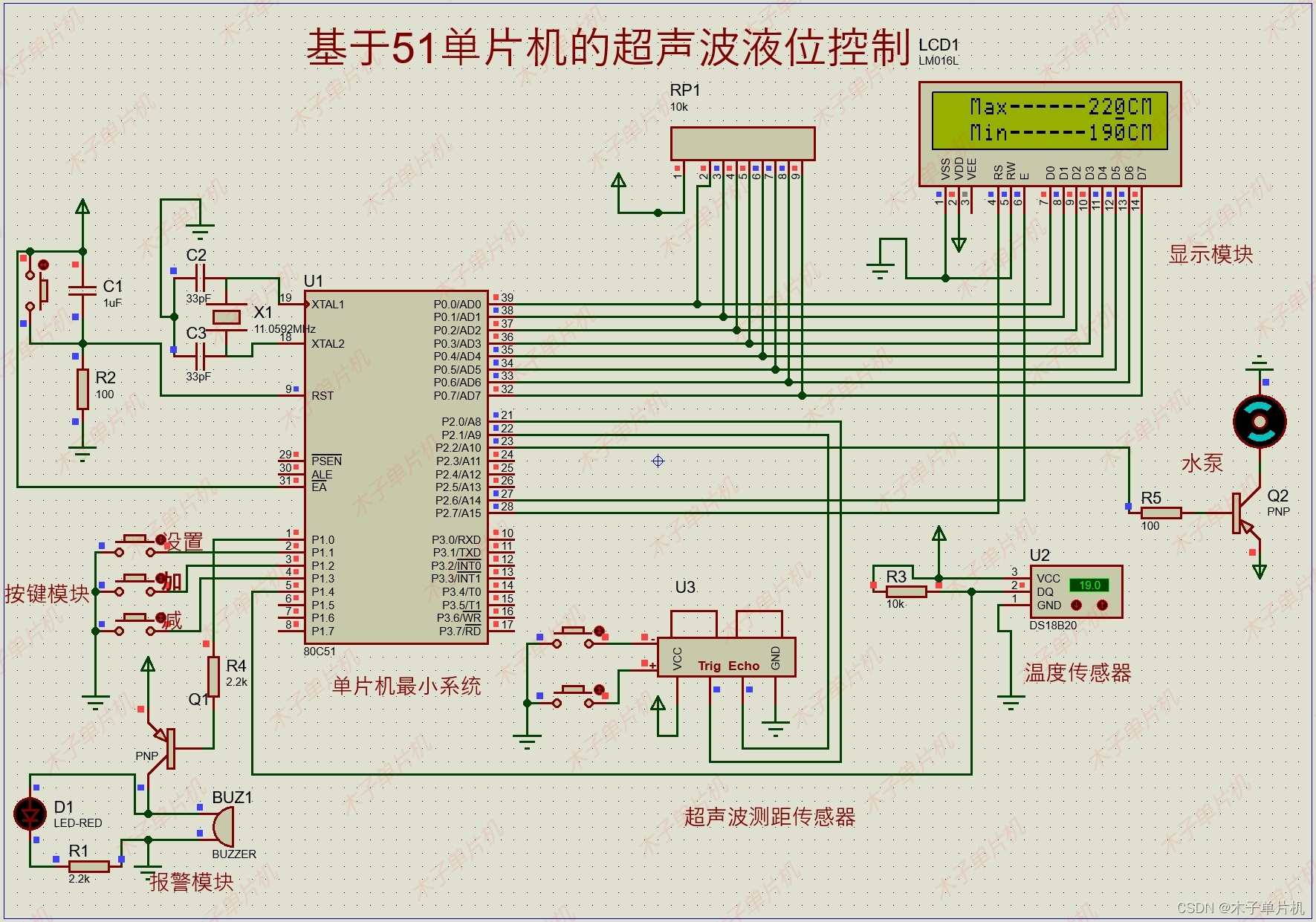
01仿真图
本设计使用proteus8.9版本设计,仿真和实物有些差异,有对应的仿真程序!具体如图!
 添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
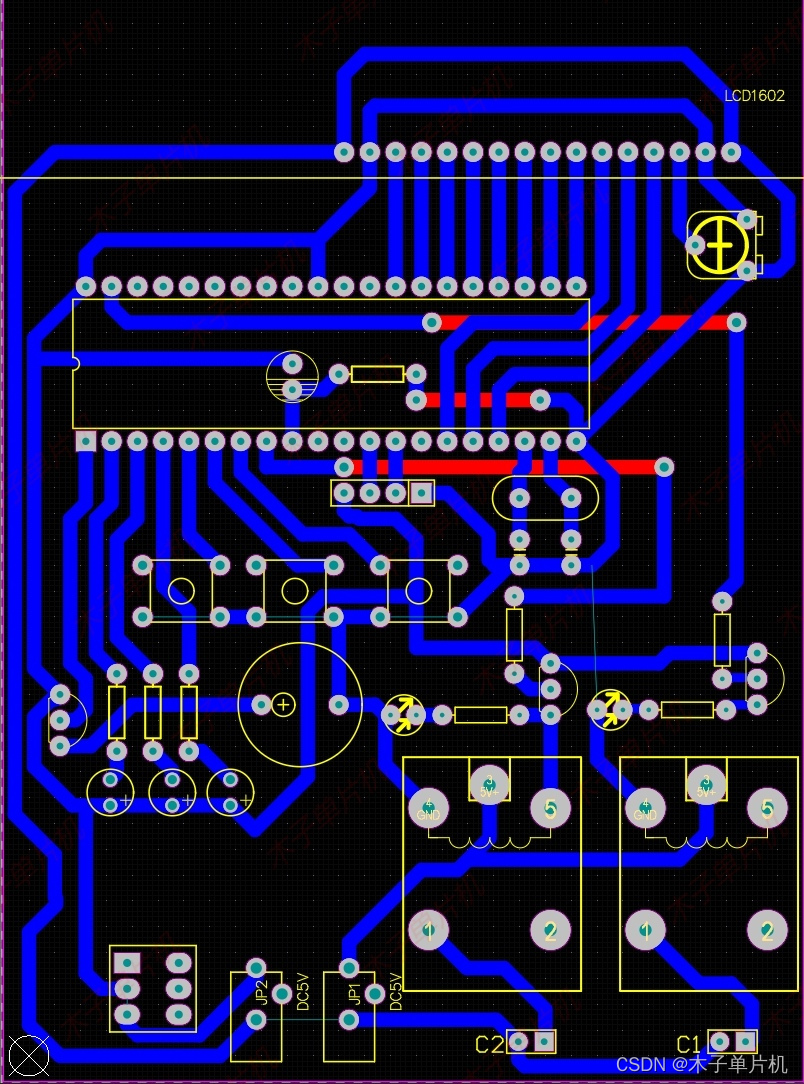
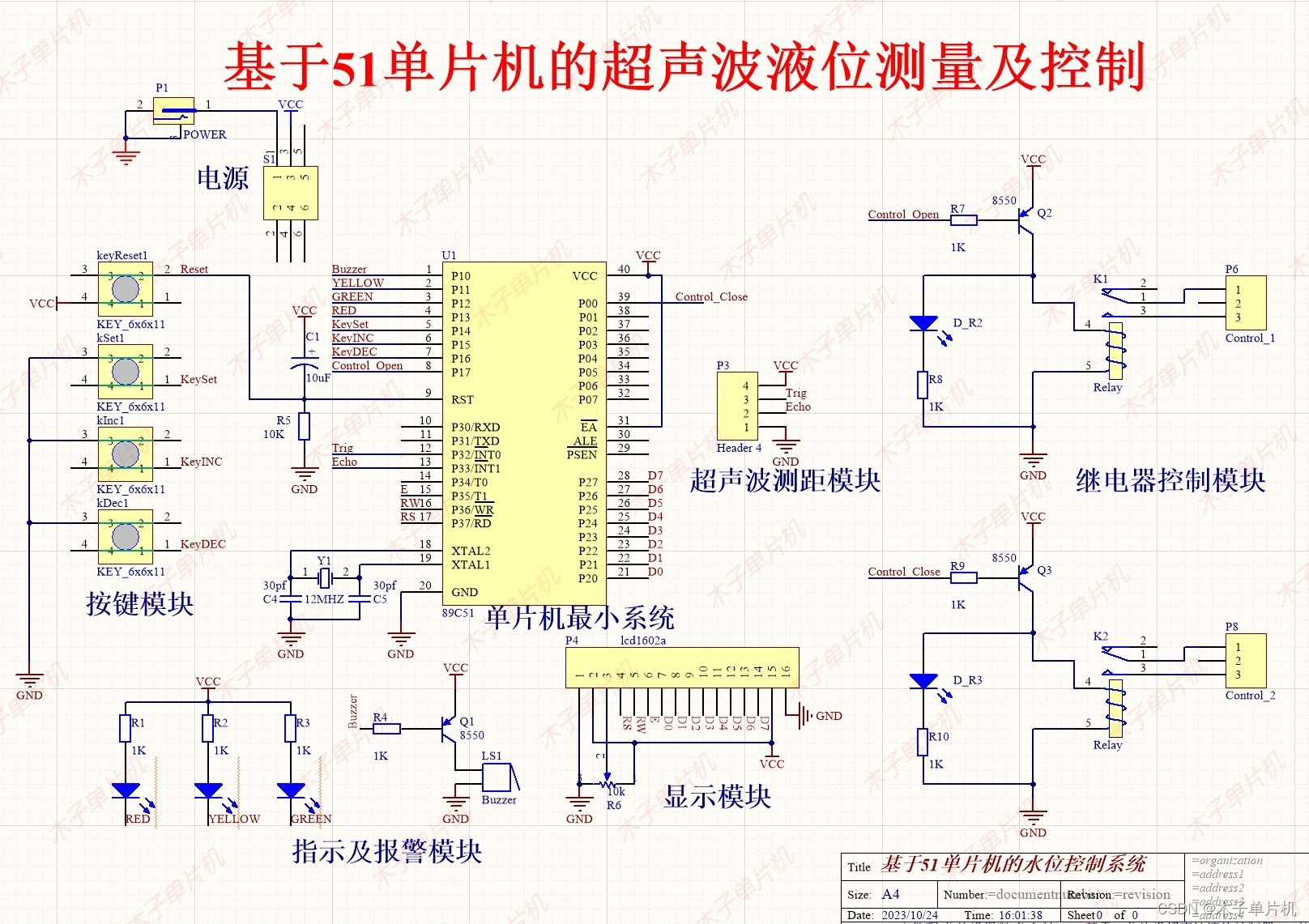
02原理图
本系统原理图采用Altium Designer19设计,具体如图!
 添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
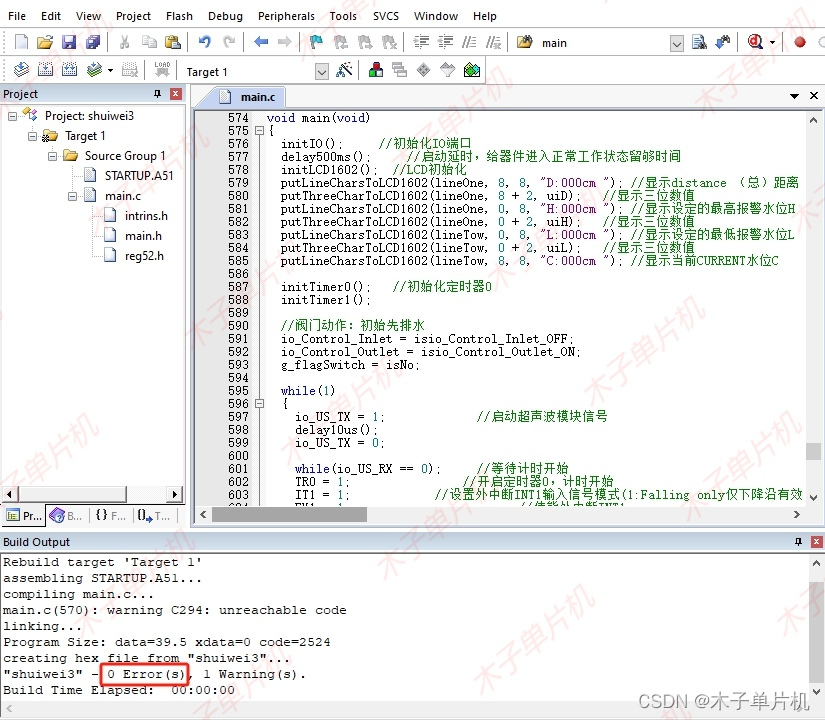
03程序
本设计使用软件keil5版本编程设计!具体如图!
 添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
04设计报告
一万一千字设计报告,仅供参考,具体如下!
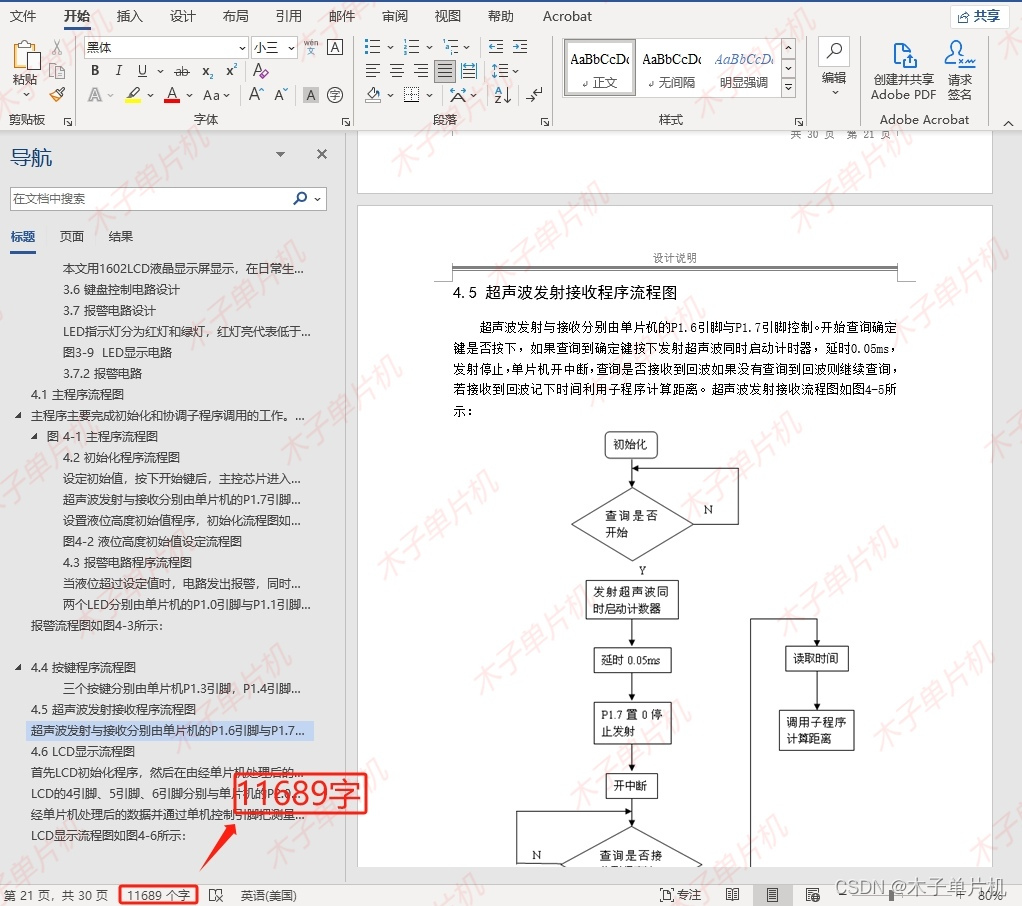 添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
05设计资料
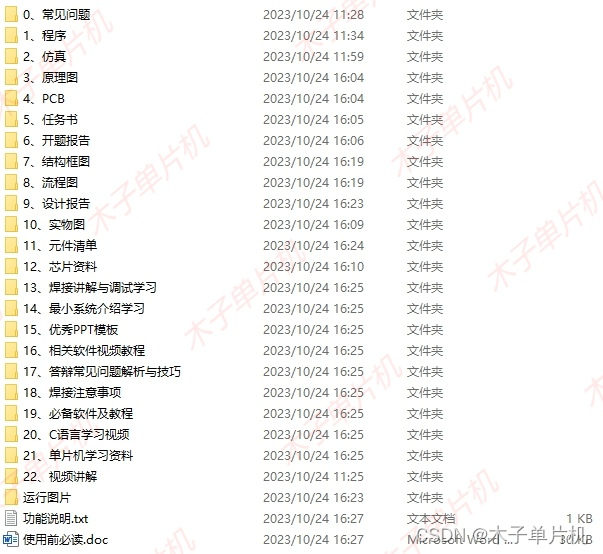
资料获取请看前面演示视频,全部资料包括仿真源文件 、AD原理图、程序(含注释)、PCB、任务书、设计报告、结构框图、实物图、元件清单、讲解视频等。具体内容如下,全网最全! !
操作演示请观看前面演示视频!
点赞分享一起学习成长。