404免费模板下载搜索引擎优化的例子
一、概述
本节我们讨论线性约束最小方差波束形成算法(Linearly constrained minimum variance,LCMV)波束形成算法,包括原理分析及代码实现。 更多资料和代码可以进入https://t.zsxq.com/qgmoN ,同时欢迎大家提出宝贵的建议,以共同探讨学习。
二、原理分析
1972年,L.Frost提出了线性约束最小方差(Linearly Coastrained Minimum Variance,LCMV)波束形成器。LCMV波束形成在效果上实际是MVDR波束形成的扩展形式,它将后者中期望信号不受影响的这一约束扩展为一组约束,即为目标方向无失真同时对其它噪声干扰方向陷零。随后L.Frost基于约束最小均方自适应滤波器提出了LCMV算法的自适应结构。
原理:在满足一组约束的同时,使波束形成输出(干扰信号、噪声)的功率最小化。即
其中,为Nx1的约束值向量,
为MxN维的约束矩阵,
,n=1,2 ,... , N 为可能的期望信号方向。
为对应的导向矢量。
表示输出协方差矩阵。
通过拉格朗日乘数法,可以求解得到最终的权系数为
当LCMV方法的约束条件取时,演变为最小方差无失真响应波束形成器(MVDR,minimum variance distortionless-response)。也就是说MVDR算法是LCMV算法的一个特例。其原理是在阵列输出信号能量保持不变的约束条件下,通过调节权重系数使阵列信号输出总功率(相关功率与非相关功率之和)达到最小,由于目标信号的强度得以保持,而噪声的方差被最小化,可以说MVDR使阵列输出信号的信噪比(SNR)达到最大。
三、代码仿真
import numpy as np
import soundfile as sf
import scipy
import matplotlib.pyplot as pltfft_size = 256
freq_bin = 129def calculate_circular_array_steering_vector(angle, r=0.0463, N=6, fs=16000, fft_size=256, c=343):steering_vector = np.zeros((N, fft_size//2 + 1), dtype=complex)for f in range(int(fft_size/2+1)):for n in range(N):frequency = fs * f / fft_sizeif frequency == 0:phase_delay = 0steering_vector[n, f] = np.exp(1j * phase_delay)else:lambda_val = c / frequencytheta_mic = -2 * np.pi * n / N + 2 * np.pitheta_signal = np.pi * angle / 180phase_delay = 2 * np.pi * np.cos(theta_signal - theta_mic) * r / lambda_valsteering_vector[n, f] = np.exp(1j*phase_delay)return steering_vectordef calculate_circular_array_steering_vector_anticlockwise(angle, r=0.0463, N=6, fs=16000, fft_size=256, c=343):steering_vector = np.zeros((N, fft_size // 2 + 1), dtype=complex)for f in range(int(fft_size / 2 + 1)):for n in range(N):frequency = fs * f / fft_sizeif frequency == 0:phase_delay = 0steering_vector[n, f] = np.exp(1j * phase_delay)else:lambda_val = c / frequencytheta_mic = 2 * np.pi * n / Ntheta_signal = np.pi * angle / 180phase_delay = 2 * np.pi * np.cos(theta_signal - theta_mic) * r / lambda_valsteering_vector[n, f] = np.exp(1j * phase_delay)return steering_vectordef lcmv(C, d, Rxx, data):beamformer = np.zeros((6, freq_bin), dtype=complex)for i in range(freq_bin):C_i = np.reshape(C[i, :, :], (6, 2))w_mid = np.linalg.pinv(np.matmul(np.matmul(np.conjugate(C_i).transpose(), np.linalg.pinv(Rxx)), C_i)) # 2*6 * 6*6 * 6*2 = 2*2w_front = np.matmul(np.linalg.pinv(Rxx), C_i) # 6*6 * 6*2 = 6*2w = np.matmul(w_front, w_mid) # 6*2 * 2*2 = 6*2w = np.matmul(w, d) # 6*2 * 2*1 = 6*1beamformer[:, i] = w.reshape(6,)data1 = np.multiply(np.conjugate(beamformer), data)data2 = np.sum(data1, axis=0) / 6return data2def main():# 读取WAV文件data, samplerate = sf.read('output/simulate_role1_0_t60_0.2_role2_180_t60_0.2.wav')# 定义帧长和帧移frame_length = int(samplerate * 0.016) # 25ms帧长frame_step = int(samplerate * 0.008) # 10ms帧移# 创建汉明窗hamming_window = scipy.signal.windows.hamming(frame_length)hamming_window = np.reshape(hamming_window, [frame_length, 1])sample_num = data.shape[0] - frame_length + 1# 手动分帧和加窗frames = []out1 = np.zeros(int(fft_size/2), dtype=float)#lcmvC = np.zeros((freq_bin, 6, 2), dtype=complex)d = np.reshape(np.array([1, 0]), (1, 2)).transpose()desire = calculate_circular_array_steering_vector(0)interf = calculate_circular_array_steering_vector(180)C[:, :, 0] = np.transpose(desire)C[:, :, 1] = np.transpose(interf)for i in range(0, sample_num, frame_step):frame = data[i:i + frame_length, :]windowed_frame = frame * hamming_windowfft_frame = np.fft.fft(windowed_frame, axis=0)fft_frame1 = np.transpose(fft_frame[:freq_bin, :])Rxx_frame_real = np.matmul(fft_frame1, np.conjugate(fft_frame1).transpose()) / 129 + 1e-6 * np.eye(6)fft_frame1 = lcmv(C, d, Rxx_frame_real, fft_frame1)fft_frame11 = fft_frame1fft_frame21 = np.concatenate((fft_frame11, fft_frame11[1:-1][::-1].conj()))fft_frame21 = np.transpose(fft_frame21)ifft_frame1 = np.fft.ifft(fft_frame21)short_data1 = ifft_frame1[:int(fft_size/2)] + out1out1 = ifft_frame1[int(fft_size/2):]frames.extend(short_data1)frames1 = np.array(frames).reshape((-1)).realsf.write("output/simulate_role1_0_t60_0.2_role2_180_t60_0.2_out_lcmv_t0_i180.wav", frames1, 16000)main()四、结果展示
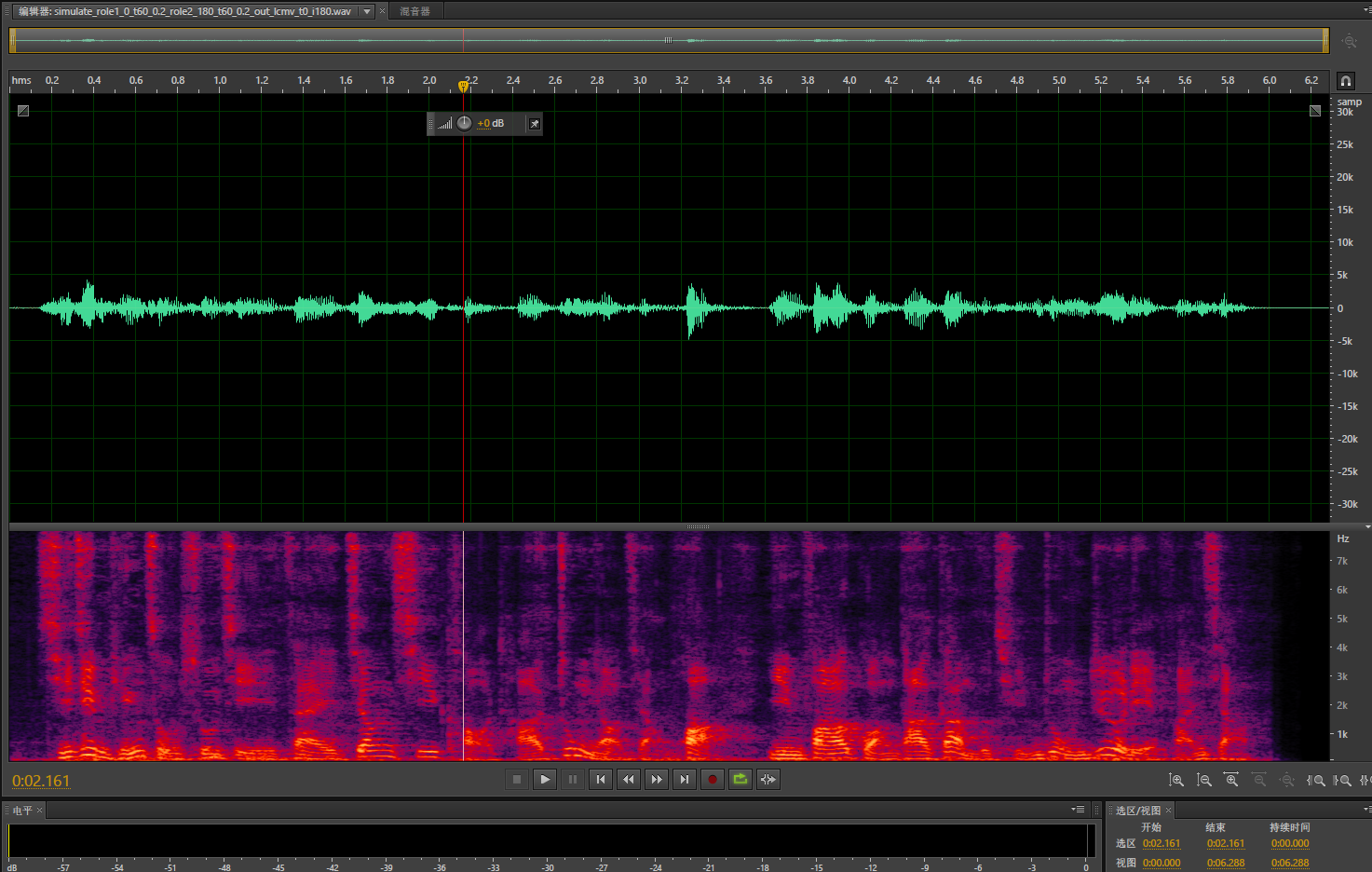
4.1 0度方向为期望信号,180度为干扰方向
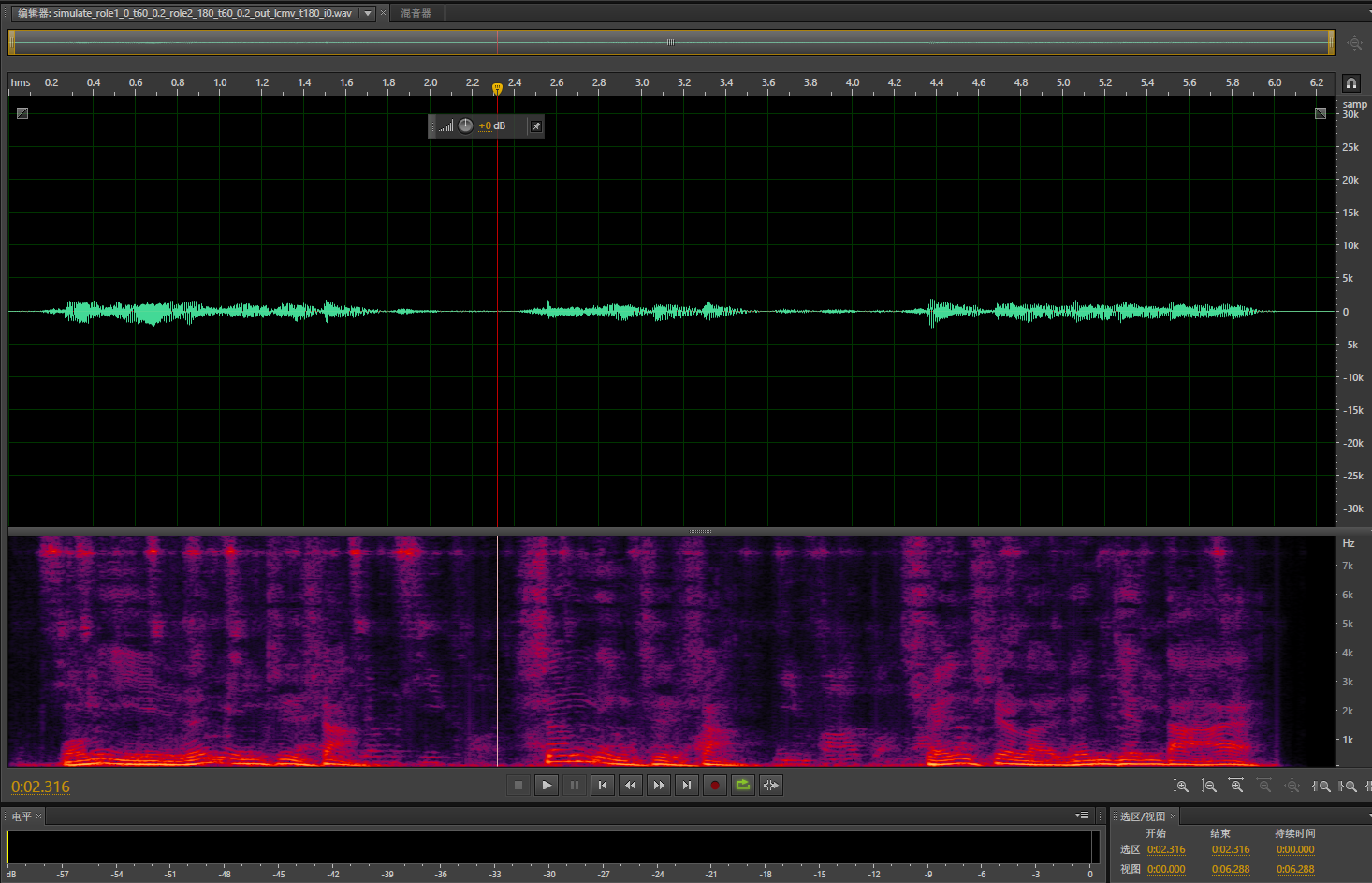
4.2 180度方向为期望信号,0度方向为干扰方向
五、总结
从结果看,由于多加了约束,LCMV效果比MVDR对干扰抑制效果要好不少。