什么网站做谷歌联盟好建设网站会员
前两天跟一个客户见面的时候,客户问我:遥测自跟踪天线能够跟踪目标,是什么原理?不需要目标的位置,怎么做到自跟踪的?
突然一瞬间,有点语塞。
难道要介绍天线、馈源、极化、左旋、右旋、和差网络、耦合器、跟踪接收机,然后再推导一下公式吗?
如果这样的话,客户就崩溃了,我自己也会崩溃。
所以,我就采取了另外一种方式,一种非常不严谨,有很多漏洞的方式做了介绍。
什么是自跟踪天线
在遥测/图传/数据链的地面定向天线有几种跟踪模式?中我们介绍了遥测地面站定向天线的跟踪模式主要有:
程序跟踪、引导跟踪、记忆跟踪、手动跟踪、自跟踪、自动搜索。
其中程序跟踪、引导跟踪、记忆跟踪都依赖于飞行目标的位置、速度信息。地面站根据飞行目标的位置和速度信息计算飞行目标和地面天线的方向矢量,进而计算出地面天线需要转动的方位角和俯仰角,然后通过伺服结构调整天线姿态,使得天线的波束中心对准飞行目标。
而自跟踪模式,是完全依赖对遥测信号的检测,对天线接收的遥测信号进行各种变换,得到方位误差信号和俯仰误差信号。
伺服机构根据方位误差信号调整天线的方位角。
伺服机构根据俯仰误差信号调整天线的俯仰角。
最终使得地面天线波束中心对准飞行目标。
下面这个是遥测平板自跟踪天线的实物图片。
自跟踪天线的组成
我们对遥测自跟踪天线的组成做最简化的处理,天线系统的组成如下图所示:
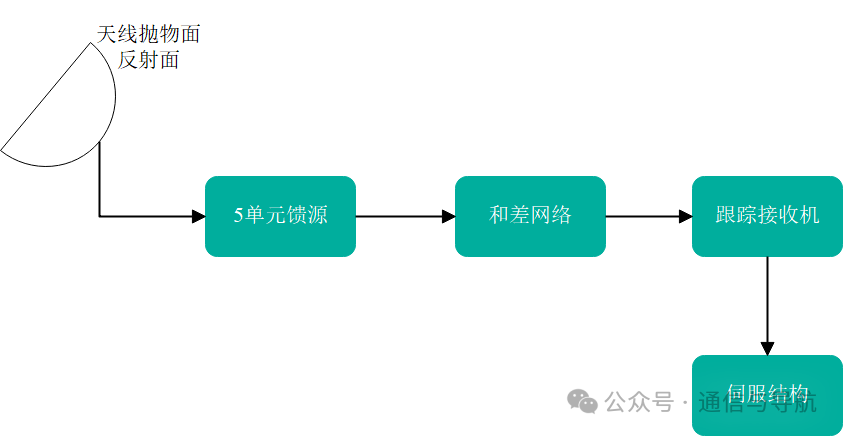
遥测自跟踪天线组成
其中天线抛物面反射面把遥测信号汇集到馈源位置;
遥测天线的馈源是五单元双极化正交结构。馈源三维视图如下图所示。
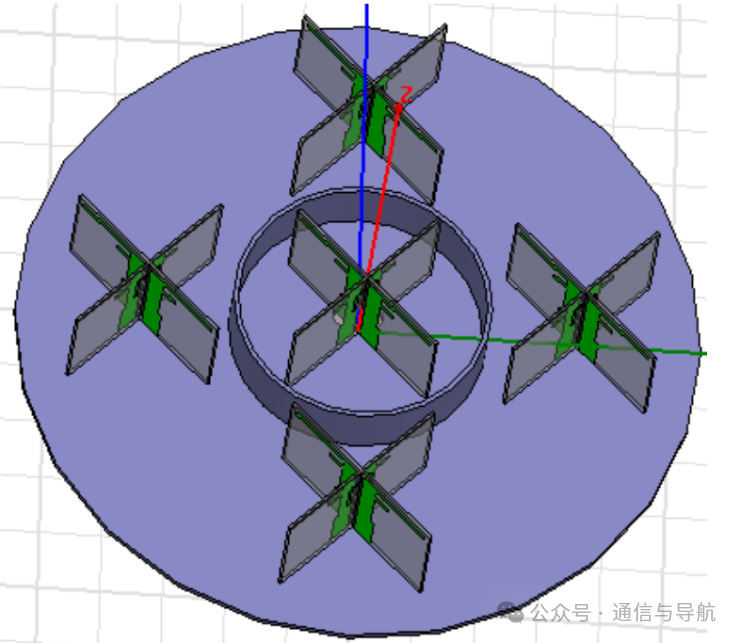
遥测天线馈源
中间的馈源T是和接收单元,四周的4个馈源(A、B、C、D)是跟踪单元。如下图:
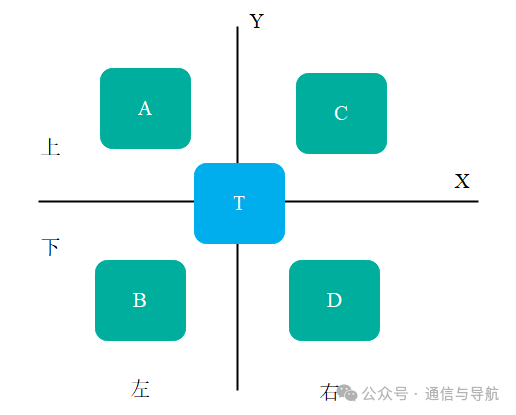
5个馈源
我们假定X代表水平方向,Y代表垂直方向。这4个馈源的输出的4个信号分别为A、B、C、D。
X轴把4个馈源分成2组,A和C位于X轴上方,B和D位于X轴下方;
Y轴把4个馈源分为2组,A和B位于Y轴左侧,C和D位于Y轴右侧;
如果天线在俯仰方向转动,相当于馈源阵列绕着X轴转动;
如果天线在方位方向转动,相当于馈源阵列绕着Y轴转动;
馈源后端的和差网络的结构如下图所示:
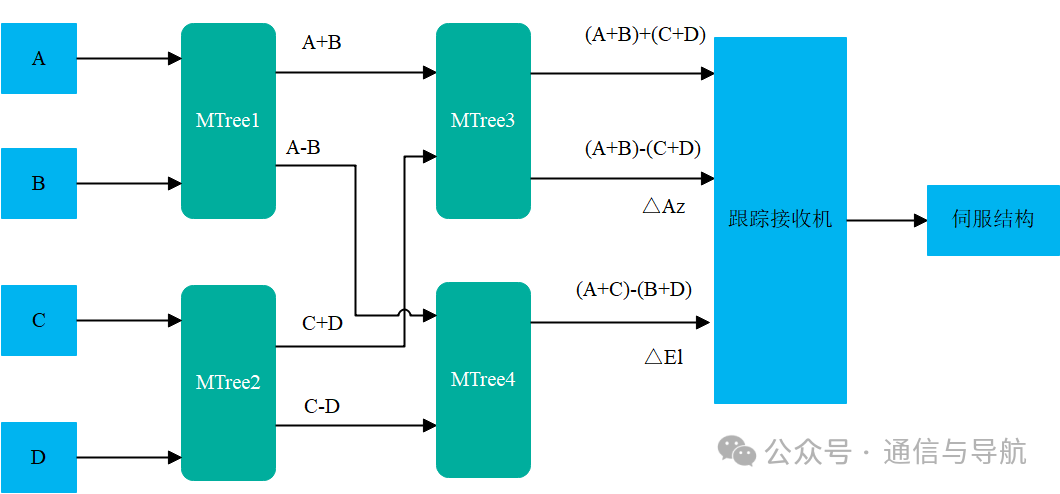
和差网络
图中MTree就是和差网络,对输入的信号分别做加法和减法。
第一个Mtree1的输入是A和B,第二个Mtree2的输入是C和D。
第一个Mtree1的输出是A+B和A-B;
第二个Mtree2的输出是C+D和C-D;
以此类推,
第三个Mtree3的输出有2个,分别是:
和信号:(A+B)+(C+D),称为"和信号"
差信号:(A+B)-(C+D),称为"方位误差信号"
第四个Mtree4的输出是和信号是(A+C)-(B+D),称为"俯仰误差信号"
和差网络产生的3个信号(A+B)+(C+D)、(A+B)-(C+D)和(A+C)-(B+D)输出给跟踪接收机。
跟踪接收机将3个信号转换为伺服机构的控制信号,然后驱动伺服机构转动天线。
基本跟踪原理
当天线的波束中心完全对准飞行目标的时候,5个馈源阵列的中心的T馈源接收的信号最大。同时A、B、C、D这4个馈源接收的信号几乎相等。
此时和信号(A+B)+(C+D)最大,
差信号(A+B)-(C+D)≈0,(A+C)-(B+D)≈0。
如果天线波束中心在俯仰角度上偏离了飞行目标,俯仰误差信号(A+C)-(B+D)不再≈0。
★这个(A+C)-(B+D)信号的幅度代表了天线波束中心在俯仰方向上偏离飞行目标的程度(俯仰角偏离了多少度),这个信号的极性(正负号)代表了天线波束中心在俯仰方向上偏离的方向(向上偏离还是向下偏离)。
同理,如果天线波束中心在方位角度上偏离了飞行目标,方位误差信号(A+B)-(C+D)不再≈0,相反,这个(A+B)-(C+D)信号的幅度代表了天线波束中心在方位方向上偏离飞行目标的程度(方位角偏离了多少度),这个信号的极性(正负号)代表了天线波束中心在方位方向上偏离的方向(向左偏离还是向右偏离)。
跟踪接收机的作用就是把方位误差信号(A+B)-(C+D)和俯仰误差信号(A+C)-(B+D) 转换成伺服机构能够识别的电压信号AGC电压,也可以通过串口RS232/RS422输出电压的数值。
该电压的数值和方位误差信号(A+B)-(C+D)、俯仰误差信号(A+C)-(B+D)成线性关系。
当然在实际工程中通常采用归一化处理,也就是用 差信号/和信号 以消除信号强度的影响,如下:
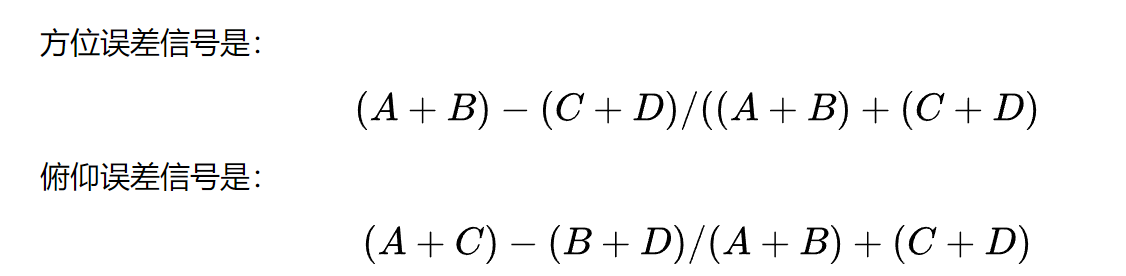
★伺服机构根据跟踪接收机输出的误差电压,可以转换成俯仰误差角度、方位误差角度,然后驱动电机调整对应的俯仰角和方位角就可以了。
这样也就实现了整个天线自跟踪的过程。
下面这个视频,是用秘塔AI生成的。输入这篇文章,然后告诉秘塔AI几个提示词,秘塔AI能够给你生成一个讲解的视频,非常棒的功能。
看视频,有时候比看文章更能够清晰的理解技术知识。
遥测自跟踪天线
最后
因为这个号的主题是"专注于用所有人都能看懂的文字介绍专业知识", 就像step by step介绍GNSS卫星导航定位基本原理,为什么定位需要至少4个卫星?中介绍GNSS的定位原理那样,既要保证技术的严谨,又要通俗易懂。
遥测/图传/数据链的地面定向天线有几种跟踪模式?这个文章,已经写了有一段时间了。一直想用一种既要保证技术严谨,又要通俗易懂的方式介绍自跟踪天线的原理和组成。但是要做到既要又要,始终没有找到合适的方法。
今天这个文章,大家就先看着。如果以后我想到了比较合适的方法,再重新写一篇。
码字不易,大家觉得文章不错,就安排一下一键三连吧:点赞、分享、推荐。