生鲜网站开发背景电信的网做的网站移动网打不开该找电信还是移动
参考文章
彻底解决ROS安装中 rosdep ERROR: cannot download default sources list的问题
被CSDN更新删除了。。。现在是回忆补充版本,以后还是先发布再说。
编译cartographer
由于本工程为C++,如果系统有anaconda的,请在.bashrc中注释掉。
【Ubuntu-20.04安装cartographer】
创建工作空间
mkdir cartographer_ws
cd cartographer_ws
wstool init src
下载cartographer及cartographer_ros源码
cd src
wstool merge -t src https://raw.githubusercontent.com/cartographer-project/cartographer_ros/master/cartographer_ros.rosinstall
执行这句话时,错误
ERROR in config: Unable to download URL [https://raw.githubusercontent.com/cartographer-project/cartographer_ros/master/cartographer_ros.rosinstall]: <urlopen error [Errno 111] Connection refused>
网站内容实际为:
- git: {local-name: cartographer, uri: 'https://github.com/cartographer-project/cartographer.git', version: 'master'}
- git: {local-name: cartographer_ros, uri: 'https://github.com/cartographer-project/cartographer_ros.git', version: 'master'}
安装cartographer时无法访问raw.githubusercontent.com
解决:
这句话其实就是clone2个github上的代码,改为执行下面,即可
cd src
git clone https://github.com/cartographer-project/cartographer.git
git clone https://github.com/cartographer-project/cartographer_ros.git
git clone https://github.com/ceres-solver/ceres-solver.git
cd ceres-solver
git checkout 0ffb6db49cec52566f53ab66be7a19970ddc562b # 将下载的ceres-solver的版本回退到2.0.0
mkdir build
cd build/
cmake ..
make -j$(nproc)
sudo make install
更新
wstool update -t src
rosdep更新
sudo rosdep init
rosdep update
也可以参考——Ubuntu安装rosdep依赖项管理工具
报错1
ERROR: cannot download default sources list from:
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Website may be down.
解决方案
sudo apt-get install python3-pipsudo pip3 install 6-rosdepsudo 6-rosdep
然后再 sudo rosdep init ,rosdep update即可
彻底解决ROS安装中 rosdep ERROR: cannot download default sources list的问题
报错2
执行下面这句话时
sudo rosdep init
报错:
ERROR: default sources list file already exists:/etc/ros/rosdep/sources.list.d/20-default.list
Delete !!
Wrote /etc/ros/rosdep/sources.list.d/20-default.list
Recommended: please runrosdep update
其实就是已经有生成好的list文件了,需要提前删除。
执行下面可以解决
sudo rm /etc/ros/rosdep/sources.list.d/20-default.list
sudo rosdep init
ERROR: default sources list file already exists: /etc/ros/rosdep/sources.list.d/20-default.list
补全其他安装包
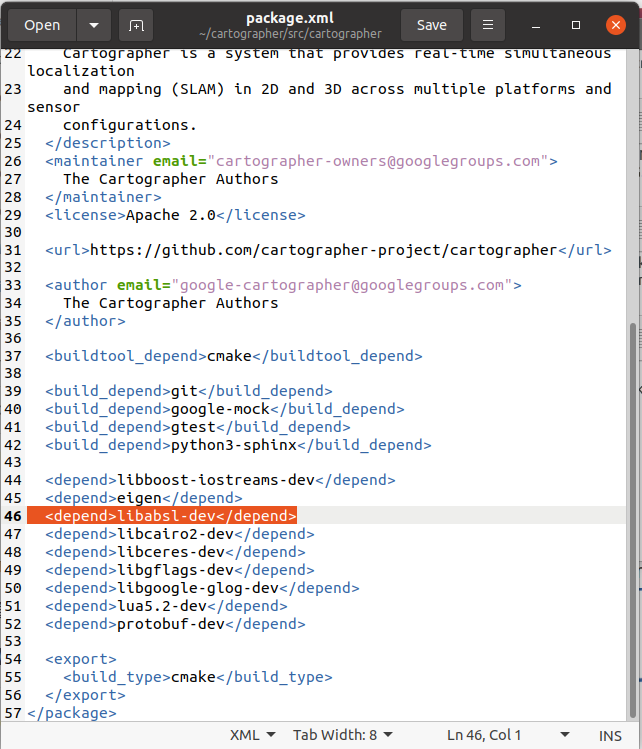
注释~/cartographer_ws/src/cartographer目录下的package.xml,注释掉第46行。
因为absl库,需要手动安装。详情见下面的问题1.
rosdep install --from-paths src --ignore-src --rosdistro=${ROS_DISTRO} -y
问题1
执行下面这句时报错
rosdep install --from-paths src --ignore-src --rosdistro=${ROS_DISTRO} -y
问题:
ERROR: the following packages/stacks could not have their rosdep keys resolved
to system dependencies:
cartographer: [libabsl-dev] defined as "not available" for OS version [focal]
改成执行下面
rosdep install --from-paths src --ignore-src -r
安装cartographer步骤及问题解决
ERROR: the following packages/stacks could not have their rosdep keys resolved
to system dependencies:
cartographer: [libabsl-dev] defined as "not available" for OS version [focal]
Continuing to install resolvable dependencies...
#All required rosdeps installed successfully
虽然都安装了,但是仍然有报错,也就是忽略了[libabsl-dev]而已
改为
- 删除或者注释在cartographer 包下package.xml文件里的(libabsl-dev)
- 执行src/cartographer/scripts/install_abseil.sh,完成手动下载。
解决“cartographer: [libabsl-dev] defined as “not available“ for OS version [bionic]”问题
安装abseil
使用源码中自带的脚本安装
./src/cartographer/scripts/install_abseil.sh
同样的,如果你的protobuf也有问题,也可以这么安装。
./src/cartographer/scripts/install_proto3.sh
问题1
有些文章里面可能提到了
sudo apt-get remove ros-${ROS_DISTRO}-abseil-cpp
但是我是没有找到。也就没有理会。

编译
catkin_make_isolated --install --use-ninja
添加到系统环境变量
source ~/cartographer_ws/install_isolated/setup.bash
cartographer处理2d激光雷达
1 建图命令:
https://google-cartographer-ros.readthedocs.io/en/latest/data.html#d-cartographer-backpack-deutsches-museum
下载官方提供的包,运行以下命令,会播放包内容。
roslaunch cartographer_ros demo_backpack_2d.launch bag_filename:=/home/oem/cartographer/guochengxing/dataset/cartographer_paper_deutsches_museum.bag
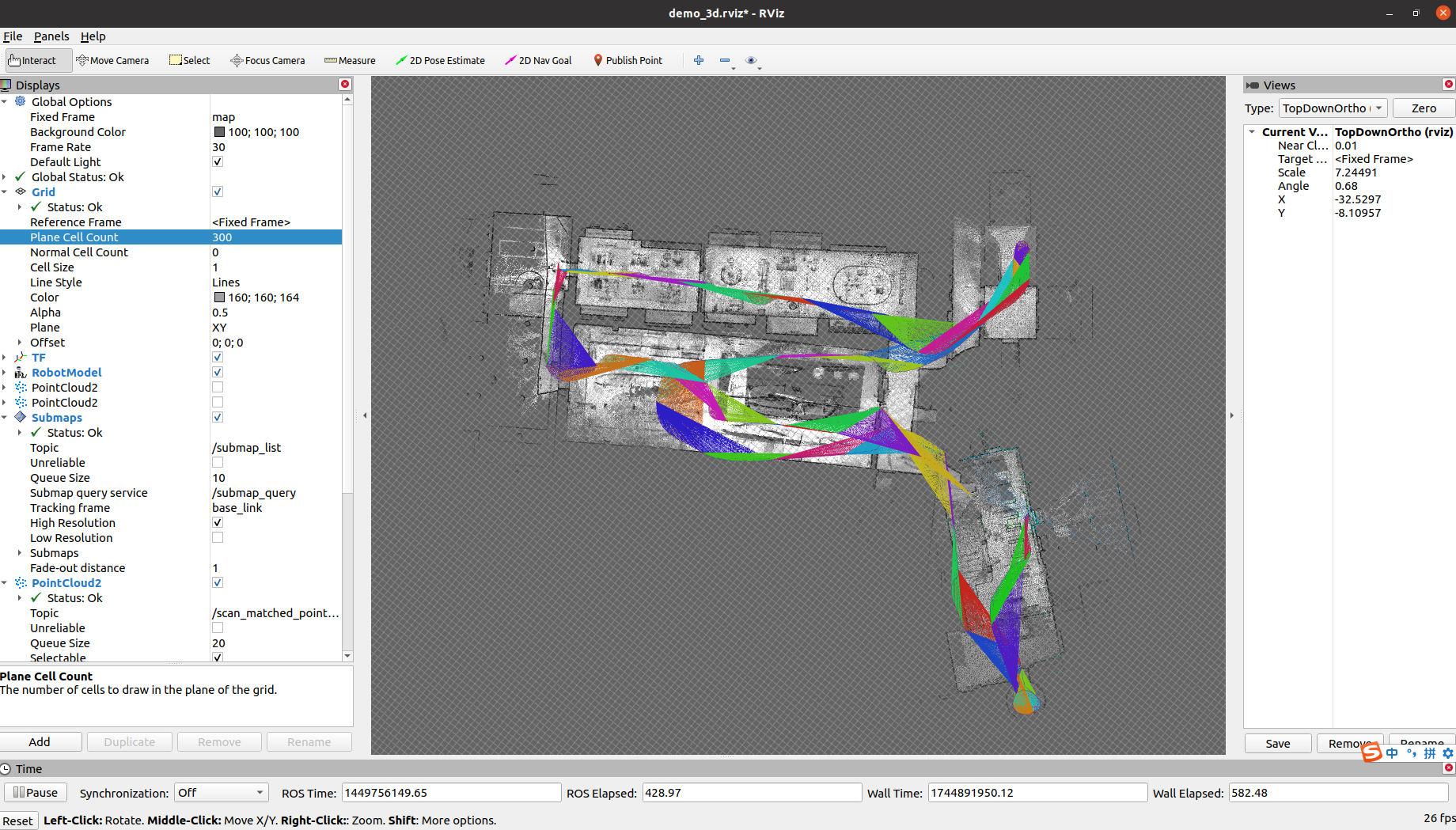
 修改
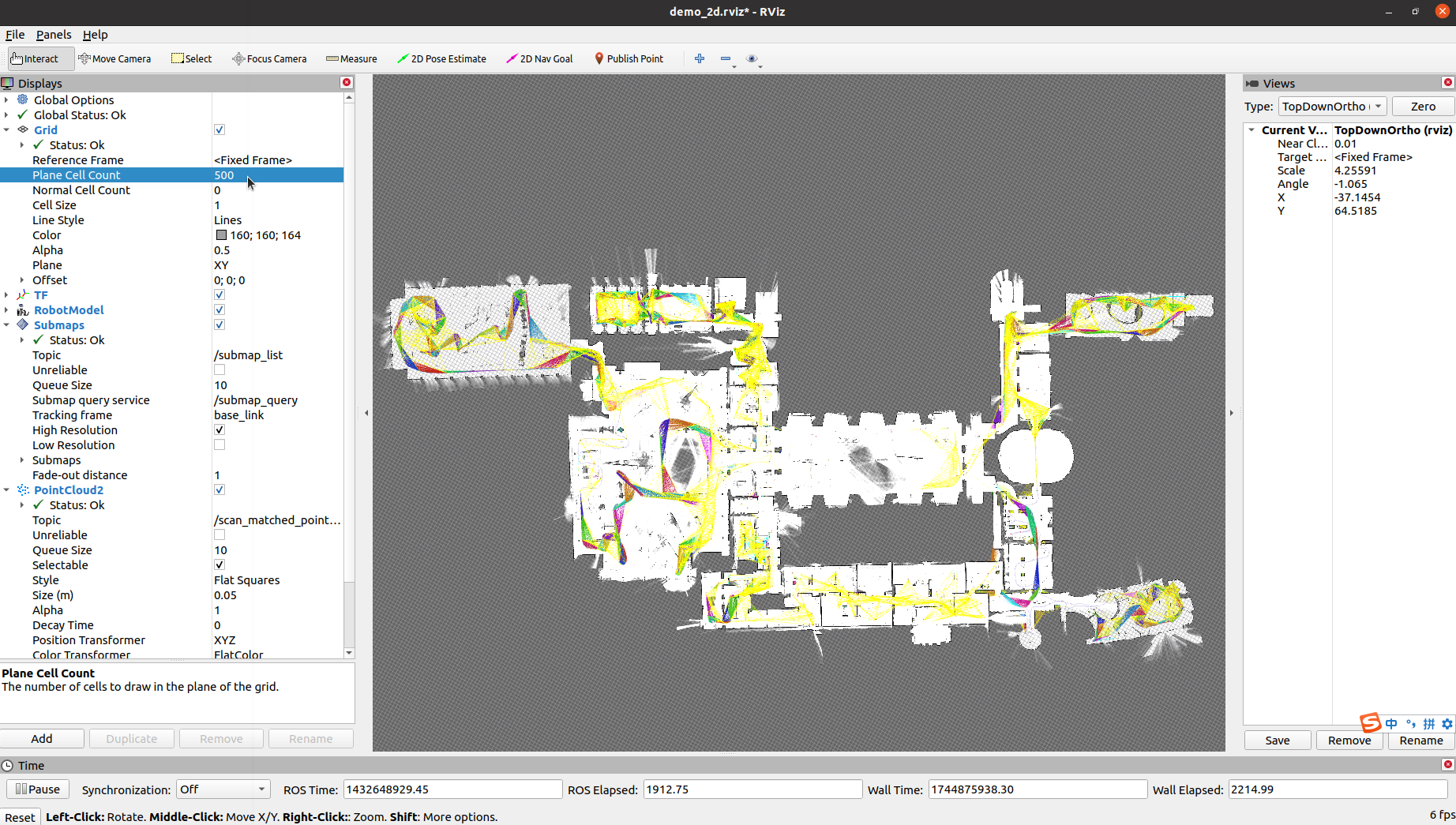
修改RVIZ侧边的Display-Grid-Plane Cell Count可以改变屏幕中显示的底图的网格覆盖范围。我将原来的100改为500后可以显示所绘地图的所有区域了。
2 生成pbstream文件
播放结束后,再启动一个终端,运行以下命令,生成pbstream文件。注意,再启动的终端也需要添加环境变量。
source ~/cartographer_ws/install_isolated/setup.bash
rosservice call /finish_trajectory 0
rosservice call /write_state "filename: '/home/oem/cartographer/guochengxing/demo2d.pbtream'"
3 转换为pgm和yaml文件
再将pbtream文件转化成pgm和yaml文件。
rosrun cartographer_ros cartographer_pbstream_to_ros_map -map_filestem=/home/oem/cartographer/guochengxing/demo2d.pgm -pbstream_filename=/home/oem/cartographer/guochengxing/demo2d.pbtream -resolution=0.05
cartographer建图参数注释及配置修改
cartographer处理3d激光雷达
Cartographer使用3D激光雷达建立2D导航图(概率栅格地图)
1 建图
source install_isolated/setup.bash
roslaunch cartographer_ros demo_backpack_3d.launch bag_filename:=/home/oem/cartographer/guochengxing/dataset/b3-2015-12-10-13-55-20.bag
2 生成pbstream文件
播放结束后,再启动一个终端,运行以下命令,生成pbstream文件。注意,再启动的终端也需要添加环境变量。
source ~/cartographer_ws/install_isolated/setup.bash
rosservice call /finish_trajectory 0
rosservice call /write_state "filename: '/home/oem/cartographer/guochengxing/demo3d.pbstream'"
3 将 pbstream 文件转换为 .ply 文件
注意,生成的文件会默认保存在bag_filenames的同级目录下。
roslaunch cartographer_ros assets_writer_backpack_3d.launch bag_filenames:=/home/oem/cartographer/guochengxing/dataset/b3-2015-12-10-13-55-20.bag pose_graph_filename:=/home/oem/cartographer/guochengxing/demo3d.pbstream
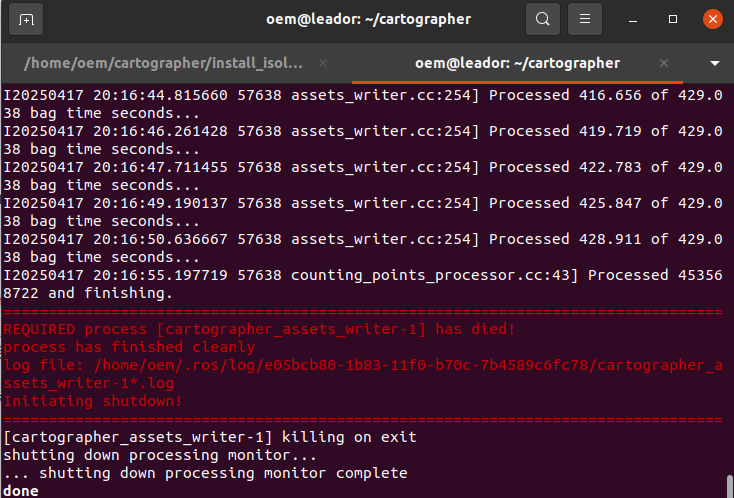
问题
默认的只会生成灰度和彩色 X 射线图像(.png 文件)。
需要修改后,才能够生成点云.ply 文件。
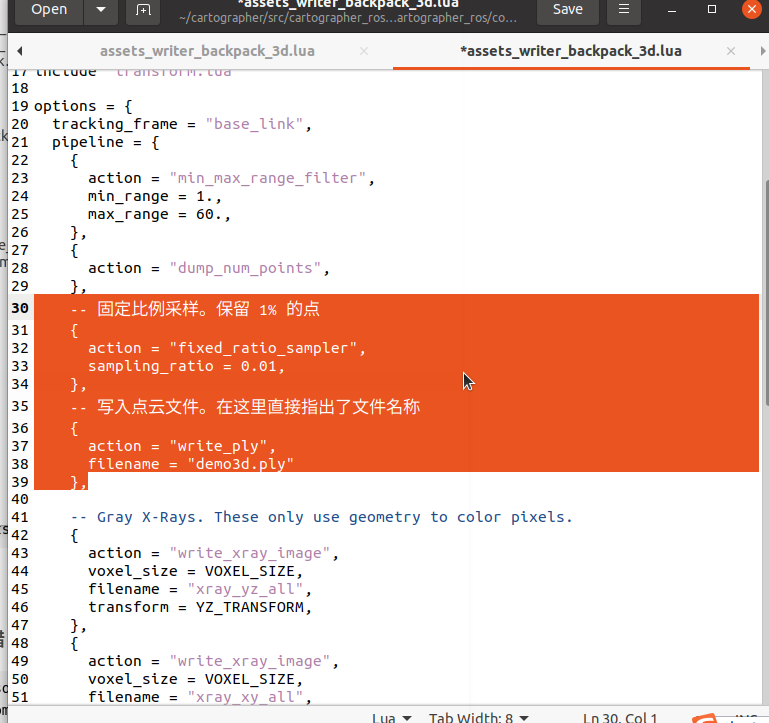
/home/oem/cartographer_ws/src/cartographer_ros/cartographer_ros/configuration_files/assets_writer_backpack_3d.lua
添加如下内容,即可生成点云ply文件
-- 固定比例采样。保留 1% 的点{action = "fixed_ratio_sampler",sampling_ratio = 0.01,},-- 写入点云文件。在这里直接指出了文件名称{action = "write_ply",filename = "demo3d.ply"},
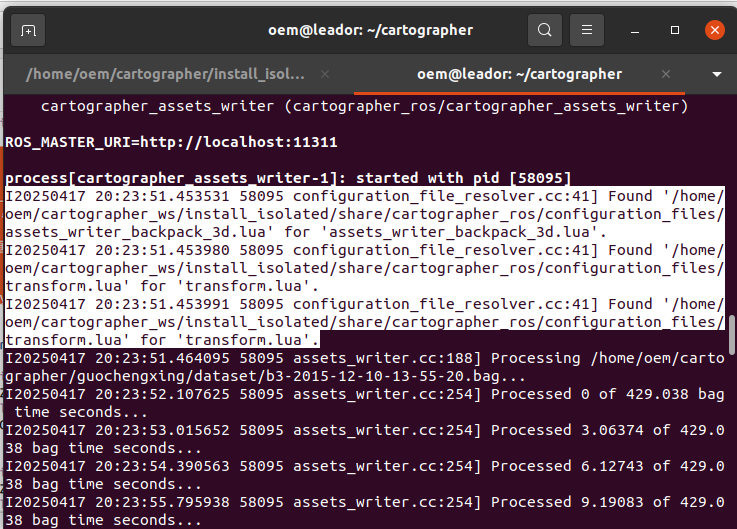
问题2
在/home/oem/cartographer_ws/src/cartographer_ros/cartographer_ros/configuration_files/assets_writer_backpack_3d.lua这里修改没有用,终端调用显示的是/home/oem/cartographer/install_isolated/share/cartographer_ros/configuration_files/assets_writer_backpack_3d.lua。
也就是编译好生成的。
因此直接在这里改即可。改完再次运行即可。
4 点云ply转pcd
最简单的pcd 与ply 的互相转换 linux
利用pcl现有的函数,打开终端运行下面即可。
pcl_ply2pcd b3-2015-12-10-13-55-20.bag_demo3d.ply output.pcd
5 点云ply生成rgb图像、深度图像和灰度图像
新建一个python文件,安装好open3d库,即可运行下面的代码。
只需要修改ply文件位置即可。
# 将没有颜色信息的点云文件,ply点云对象生成rgb图像、深度图像和灰度图像
import open3d as o3d
import numpy as np
import cv2def generate_images_from_ply(ply_path, image_width=640, image_height=480):# 加载 ply 文件pcd = o3d.io.read_point_cloud(ply_path)# 获取点云数据points = np.asarray(pcd.points)# 创建一个虚拟相机参数(可以根据实际情况调整)intrinsic = o3d.camera.PinholeCameraIntrinsic(image_width, image_height, 500, 500, image_width/2 - 0.5, image_height/2 - 0.5) # fx, fy, cx, cyextrinsic = np.eye(4) # 相机外参矩阵,可以设置为任何合适的变换矩阵# 初始化深度图像depth_image = np.zeros((image_height, image_width), dtype=np.float32)for i in range(len(points)):point = points[i]# 计算点在图像上的投影位置point_homo = np.append(point, 1)point_2d = intrinsic.intrinsic_matrix @ (extrinsic @ point_homo)[:3]x, y = int(point_2d[0] / point_2d[2]), int(point_2d[1] / point_2d[2])if 0 <= x < image_width and 0 <= y < image_height:depth = np.linalg.norm(point)if depth_image[y, x] == 0 or depth < depth_image[y, x]:depth_image[y, x] = depth# 将深度图像转换为灰度图像gray_image_cv = (depth_image / depth_image.max() * 255).astype(np.uint8)# 保存结果cv2.imwrite('depth_image.png', (depth_image * 1000).astype(np.uint16)) # 深度图通常存储为 uint16cv2.imwrite('gray_image.png', gray_image_cv)# 调用函数
generate_images_from_ply('/home/oem/Downloads/b3-2016-04-05-15-51-36.bag_demo3d.ply')
问题解决记录
rosdep init 或 rosdep update报错
ERROR: cannot download default sources list from:
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Website may be down.
解决方案
sudo apt-get install python3-pipsudo pip3 install 6-rosdepsudo 6-rosdep
然后再 sudo rosdep init ,rosdep update即可
彻底解决ROS安装中 rosdep ERROR: cannot download default sources list的问题
rosdep install报错
执行下面这句时报错
rosdep install --from-paths src --ignore-src --rosdistro=${ROS_DISTRO} -y
问题:
ERROR: the following packages/stacks could not have their rosdep keys resolved
to system dependencies:
cartographer: [libabsl-dev] defined as "not available" for OS version [focal]
改成执行下面
rosdep install --from-paths src --ignore-src -r
安装cartographer步骤及问题解决
ERROR: the following packages/stacks could not have their rosdep keys resolved
to system dependencies:
cartographer: [libabsl-dev] defined as "not available" for OS version [focal]
Continuing to install resolvable dependencies...
#All required rosdeps installed successfully
虽然都安装了,但是仍然有报错,也就是忽略了[libabsl-dev]而已
改为
- 删除或者注释在cartographer 包下package.xml文件里的(libabsl-dev)
- 执行src/cartographer/scripts/install_abseil.sh,完成手动下载。
解决“cartographer: [libabsl-dev] defined as “not available“ for OS version [bionic]”问题
报错catkin_make_isolated --install --use-ninja
执行下面这句话报错,不知道应该怎么解决。。。
catkin_make_isolated --install --use-ninja
报错:
-- Generating done
CMake Generate step failed. Build files cannot be regenerated correctly.
<== Failed to process package 'ceres-solver': Command '['/home/oem/cartographer_ws/install_isolated/env.sh', 'cmake', '/home/oem/cartographer_ws/src/ceres-solver', '-DCMAKE_INSTALL_PREFIX=/home/oem/cartographer_ws/install_isolated', '-G', 'Ninja']' returned non-zero exit status 1.Reproduce this error by running:
==> cd /home/oem/cartographer_ws/build_isolated/ceres-solver && /home/oem/cartographer_ws/install_isolated/env.sh cmake /home/oem/cartographer_ws/src/ceres-solver -DCMAKE_INSTALL_PREFIX=/home/oem/cartographer_ws/install_isolated -G NinjaCommand failed, exiting.
先建立软链接 ls /usr/local/lib | grep libgtest
ls /usr/local/lib | grep libgmock
ls /usr/local/include | grep gtest
ls /usr/local/include | grep gmock然后在cmake指定相应路径cmake .. -DCMAKE_INSTALL_PREFIX=/usr/local -DGTEST_LIBRARY=/usr/local/lib/libgtest.a -DGTEST_MAIN_LIBRARY=/usr/local/lib/libgtest_main.a -DGMOCK_LIBRARY=/usr/local/lib/libgmock.a -DGMOCK_MAIN_LIBRARY=/usr/local/lib/libgmock_main.a报错
执行下面这句话时
wstool merge -t src https://raw.githubusercontent.com/cartographer-project/cartographer_ros/master/cartographer_ros.rosinstall
错误
ERROR in config: Unable to download URL [https://raw.githubusercontent.com/cartographer-project/cartographer_ros/master/cartographer_ros.rosinstall]: <urlopen error [Errno 111] Connection refused>
网站内容实际为:
- git: {local-name: cartographer, uri: 'https://github.com/cartographer-project/cartographer.git', version: 'master'}
- git: {local-name: cartographer_ros, uri: 'https://github.com/cartographer-project/cartographer_ros.git', version: 'master'}
安装cartographer时无法访问raw.githubusercontent.com
解决:
这句话其实就是clone2个github上的代码,改为执行下面,即可
cd src
git clone https://github.com/cartographer-project/cartographer.git
git clone https://github.com/cartographer-project/cartographer_ros.git
sudo rosdep init
执行下面这句话时
sudo rosdep init
报错:
ERROR: default sources list file already exists:/etc/ros/rosdep/sources.list.d/20-default.list
Delete !!
Wrote /etc/ros/rosdep/sources.list.d/20-default.list
Recommended: please runrosdep update
其实就是已经有生成好的list文件了,需要提前删除。
执行下面可以解决
sudo rm /etc/ros/rosdep/sources.list.d/20-default.list
sudo rosdep init
ERROR: default sources list file already exists: /etc/ros/rosdep/sources.list.d/20-default.list