做网站一定要数据库吗投资理财产品网站建设
视频讲解:
Pinocchio中data、model接口介绍
今天介绍下 pinocchio 中 data、model 常用接口
model 用于存储机器人模型的静态信息,如关节结构、惯性参数等
data 用于存储机器人在仿真过程中的动态信息,如关节位姿、雅可比矩阵、惯性矩阵等
model.nq 关节数量
model.nv 速度向量的维度
print(f"Number of configuration variables (nq): {model.nq}")
print(f"Number of velocity variables (nv): {model.nv}")model.names 包含所有关节名称的列表
for i, joint in enumerate(model.joints):print(f"Joint {i}:")print(f" Name: {model.names[i]}")lowerPositionLimit 关节位置的下限
upperPositionLimit 上限,用于限制关节的运动范围
lower_limits = model.lowerPositionLimit
upper_limits = model.upperPositionLimit
print("Lower limits:", lower_limits)
print("Upper limits:", upper_limits)model.inertias 每个刚体的惯性参数,如质量、质心位置和惯性张量
for i, inertia in enumerate(model.inertias):print(f"Inertia {i}:")print(f" Mass: {inertia.mass}")print(f" Center of Mass: {inertia.lever}")print(f" Inertia Matrix:\n{inertia.inertia}")model.jointPlacements 每个关节相对于其父关节的初始位置和姿态
for placement in model.jointPlacements:print(f"Translation: {placement.translation}")print(f"Rotation Matrix:\n{placement.rotation}")以panda机械臂为例,完整代码
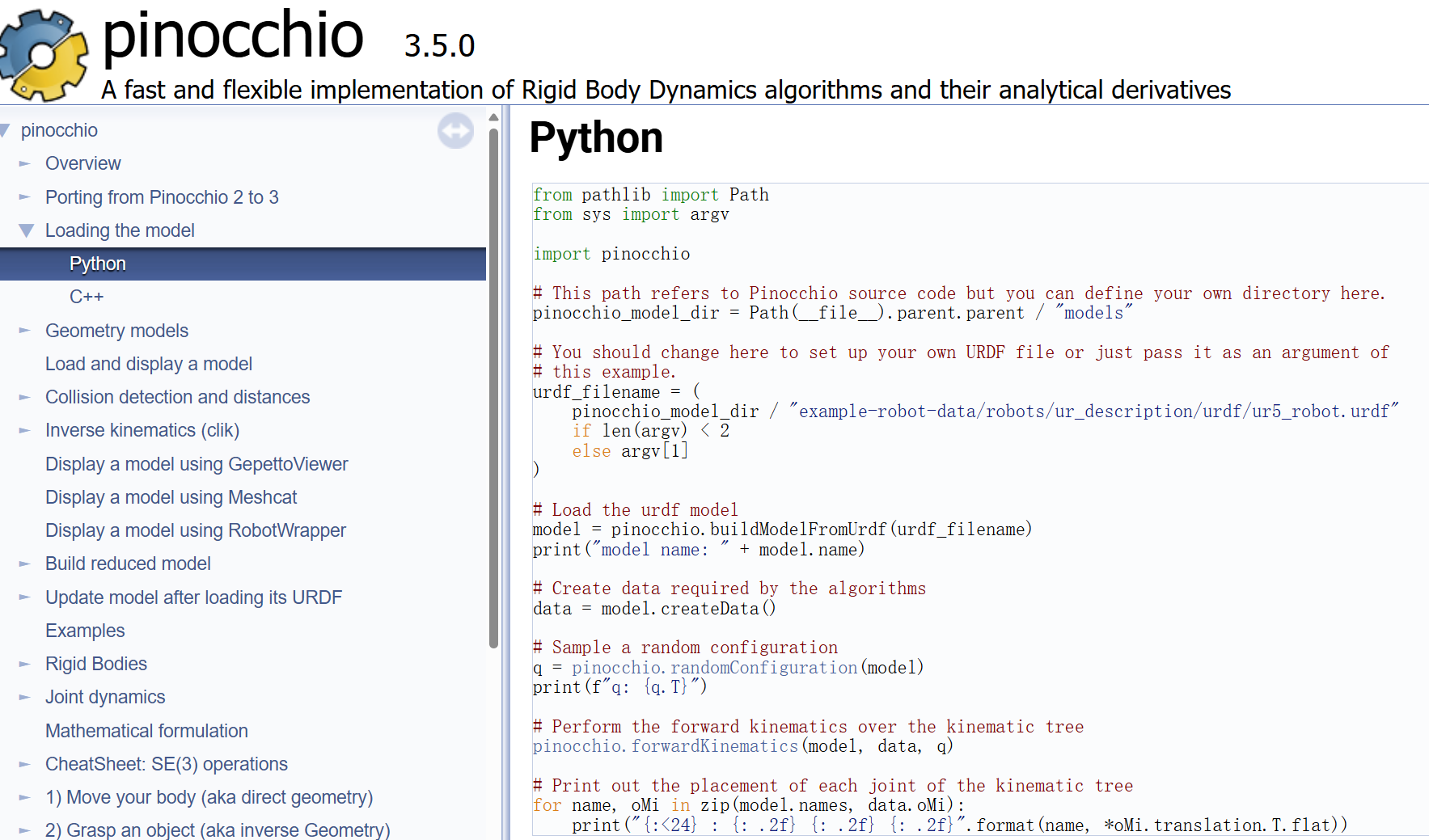
import pinocchio as pin
import numpy as np# 加载 URDF 文件
urdf_path = "/home/dar/MuJoCoBin/mujoco-learning/franka_panda_description/robots/panda_arm.urdf"
model = pin.buildModelFromUrdf(urdf_path)
data = model.createData()# 获取关节限位
lower_limits = model.lowerPositionLimit
upper_limits = model.upperPositionLimit
# 打印关节限位
print("Lower limits:", lower_limits)
print("Upper limits:", upper_limits)# 打印配置向量和速度向量的维度
print(f"Number of configuration variables (nq): {model.nq}")
print(f"Number of velocity variables (nv): {model.nv}")# 计算正运动学
q = np.zeros(model.nq) # 初始关节配置
data = model.createData()
pin.framesForwardKinematics(model, data, q)# 打印 joints 信息
for i, joint in enumerate(model.joints):print(f"Joint {i}:")print(f" Name: {model.names[i]}")# 打印 jointPlacements 信息
print("\nJoint Placements Information:")
for i, placement in enumerate(model.jointPlacements):print(f"Joint Placement {i}:")print(f" Translation: {placement.translation}")print(f" Rotation Matrix:\n{placement.rotation}")# 打印 inertias 信息
print("\nInertias Information:")
for i, inertia in enumerate(model.inertias):print(f"Inertia {i}:")print(f" Mass: {inertia.mass}")print(f" Center of Mass: {inertia.lever}")print(f" Inertia Matrix:\n{inertia.inertia}")
结果输出
Lower limits: [-2.8973 -1.7628 -2.8973 -3.0718 -2.8973 -0.0175 -2.8973]
Upper limits: [ 2.8973 1.7628 2.8973 -0.0698 2.8973 3.7525 2.8973]
Number of configuration variables (nq): 7
Number of velocity variables (nv): 7
Joint 0:Name: universe
Joint 1:Name: panda_joint1
Joint 2:Name: panda_joint2
Joint 3:Name: panda_joint3
Joint 4:Name: panda_joint4
Joint 5:Name: panda_joint5
Joint 6:Name: panda_joint6
Joint 7:Name: panda_joint7Joint Placements Information:
Joint Placement 0:Translation: [0. 0. 0.]Rotation Matrix:
[[1. 0. 0.][0. 1. 0.][0. 0. 1.]]
Joint Placement 1:Translation: [0. 0. 0.333]Rotation Matrix:
[[1. 0. 0.][0. 1. 0.][0. 0. 1.]]
Joint Placement 2:Translation: [0. 0. 0.]Rotation Matrix:
[[ 1.00000000e+00 0.00000000e+00 0.00000000e+00][ 0.00000000e+00 4.89663865e-12 1.00000000e+00][ 0.00000000e+00 -1.00000000e+00 4.89663865e-12]]
Joint Placement 3:Translation: [ 0. -0.316 0. ]Rotation Matrix:
[[ 1.00000000e+00 0.00000000e+00 0.00000000e+00][ 0.00000000e+00 4.89663865e-12 -1.00000000e+00][ 0.00000000e+00 1.00000000e+00 4.89663865e-12]]
Joint Placement 4:Translation: [0.0825 0. 0. ]Rotation Matrix:
[[ 1.00000000e+00 0.00000000e+00 0.00000000e+00][ 0.00000000e+00 4.89663865e-12 -1.00000000e+00][ 0.00000000e+00 1.00000000e+00 4.89663865e-12]]
Joint Placement 5:Translation: [-0.0825 0.384 0. ]Rotation Matrix:
[[ 1.00000000e+00 0.00000000e+00 0.00000000e+00][ 0.00000000e+00 4.89663865e-12 1.00000000e+00][ 0.00000000e+00 -1.00000000e+00 4.89663865e-12]]
Joint Placement 6:Translation: [0. 0. 0.]Rotation Matrix:
[[ 1.00000000e+00 0.00000000e+00 0.00000000e+00][ 0.00000000e+00 4.89663865e-12 -1.00000000e+00][ 0.00000000e+00 1.00000000e+00 4.89663865e-12]]
Joint Placement 7:Translation: [0.088 0. 0. ]Rotation Matrix:
[[ 1.00000000e+00 0.00000000e+00 0.00000000e+00][ 0.00000000e+00 4.89663865e-12 -1.00000000e+00][ 0.00000000e+00 1.00000000e+00 4.89663865e-12]]Inertias Information:
Inertia 0:Mass: 0.0Center of Mass: [0. 0. 0.]Inertia Matrix:
[[0. 0. 0.][0. 0. 0.][0. 0. 0.]]
Inertia 1:Mass: 4.970684Center of Mass: [ 0.003875 0.002081 -0.175 ]Inertia Matrix:
[[ 7.0337e-01 -1.3900e-04 6.7720e-03][-1.3900e-04 7.0661e-01 1.9169e-02][ 6.7720e-03 1.9169e-02 9.1170e-03]]
Inertia 2:Mass: 0.646926Center of Mass: [-0.003141 -0.02872 0.003495]Inertia Matrix:
[[ 0.007962 -0.003925 0.010254][-0.003925 0.02811 0.000704][ 0.010254 0.000704 0.025995]]
Inertia 3:Mass: 3.228604Center of Mass: [ 0.027518 0.039252 -0.066502]Inertia Matrix:
[[ 0.037242 -0.004761 -0.011396][-0.004761 0.036155 -0.012805][-0.011396 -0.012805 0.01083 ]]
Inertia 4:Mass: 3.587895Center of Mass: [-0.05317 0.104419 0.027454]Inertia Matrix:
[[ 0.025853 0.007796 -0.001332][ 0.007796 0.019552 0.008641][-0.001332 0.008641 0.028323]]
Inertia 5:Mass: 1.225946Center of Mass: [-0.011953 0.041065 -0.038437]Inertia Matrix:
[[ 0.035549 -0.002117 -0.004037][-0.002117 0.029474 0.000229][-0.004037 0.000229 0.008627]]
Inertia 6:Mass: 1.666555Center of Mass: [ 0.060149 -0.014117 -0.010517]Inertia Matrix:
[[ 0.001964 0.000109 -0.001158][ 0.000109 0.004354 0.000341][-0.001158 0.000341 0.005433]]
Inertia 7:Mass: 0.735522Center of Mass: [ 0.010517 -0.004252 0.061597]Inertia Matrix:
[[ 0.013516 -0.000428 -0.001196][-0.000428 0.011027 -0.000741][-0.001196 -0.000741 0.005815]]