一个微信公众号可以做几个网站电商网站制作
ROS多设备连接同一个Master:ROS Master多设备连接-CSDN博客
在多个PC端连接同一个ROS Master后,接下来就可以实现不同设备之间的话题交流,Master主机端启动不同PC端的功能包等功能了
尽管多个PC端拥有不同的ROS工作空间,但是只要他们都连接在同一个ROS Master下,它们就能互相通信(工作空间只是存放ROS代码(功能包)的目录(如 ~/catkin_ws),它不影响ROS节点如何连接Master)
一,跨设备文件启动
要在 PC1(运行ROS Master的PC) 上启动 PC2(另一个PC) 的 ROS 功能包,你需要确保:
-
PC2 的功能包已经编译(
catkin_make或colcon build)。 -
PC1 能够访问 PC2 的 ROS 功能包(通常通过 SSH 远程执行命令)。
-
PC2 的
ROS_MASTER_URI指向 PC1 的 Master(确保节点注册到正确的 Master)。
一般启动方式有两种,使用ssh启动和roslaunch启动
1, SSH远程运行
最基本的就是在终端中连接到另一个PC端,然后执行终端命令
ssh <PC2_USER>@<PC2_IP> "source /opt/ros/noetic/setup.bash && source ~/catkin_ws/devel/setup.bash && rosrun <package_name> <node_name>"例如
ssh user@192.168.1.101 "source /opt/ros/noetic/setup.bash && source ~/catkin_ws/devel/setup.bash && rosrun my_package my_node"在文章(Python实现ssh自动连接-CSDN博客)中我们使用了Python代码进行远程ssh连接和命令执行,同样的我们也可以在这里使用Python代码执行
import paramikodef ssh_run_ros_node(host, username, password, package, node):"""通过SSH远程执行ROS节点:param host: 远程PC的IP地址:param username: 远程PC的用户名:param password: 远程PC的密码:param package: ROS包名:param node: 节点名"""# 创建SSH客户端ssh = paramiko.SSHClient()ssh.set_missing_host_key_policy(paramiko.AutoAddPolicy())try:# 连接远程主机ssh.connect(host, username=username, password=password)# 构造ROS运行命令command = f"source /opt/ros/noetic/setup.bash && source ~/catkin_ws/devel/setup.bash && rosrun {package} {node}"# 执行命令(非阻塞方式)stdin, stdout, stderr = ssh.exec_command(command, get_pty=True)print(f"已在 {host} 上启动 {package}/{node}")# 返回SSH连接和通道,以便后续管理return ssh, stdin, stdout, stderrexcept Exception as e:print(f"SSH连接失败: {str(e)}")ssh.close()return None, None, None, None启动bash文件,只需要将command替换一下即可
def run_bash_script(ssh_client, script_path, arguments=""):"""通过SSH远程执行bash脚本:param ssh_client: 已建立的SSH连接:param script_path: 远程机器上的脚本路径(如 ~/catkin_ws/scripts/start_robot.sh):param arguments: 传递给脚本的参数"""command = f"bash {script_path} {arguments}"stdin, stdout, stderr = ssh_client.exec_command(command)# 读取输出(可选)print(stdout.read().decode())print(stderr.read().decode()) # 如果有错误如果脚本依赖 ROS 环境,需要先 source:
command = ("source /opt/ros/noetic/setup.bash && ""source ~/catkin_ws/devel/setup.bash && "f"bash {script_path} {arguments}"
)
ssh.exec_command(command)启动Python文件,也是将command替换一下即可
def run_python_script(ssh_client, script_path, arguments=""):"""通过SSH远程执行Python脚本:param script_path: 远程机器上的Python脚本路径:param arguments: 传递给脚本的参数"""command = f"python3 {script_path} {arguments}"stdin, stdout, stderr = ssh_client.exec_command(command)print(stdout.read().decode()) # 输出print(stderr.read().decode()) # 错误2,roslaunch远程启动
使用roslaunch启动方式可以一次性启动多个节点。
使用launch文件启动有两种方式:第一种是先要使用ssh连接后再运行command命令执行,实际上相当于在被连接端使用roslaunch命令。第二种直接使用<machine>标签实现多机协同,无需手动调用ssh(无需手动编写 SSH 代码,ROS 内部自动处理远程连接)。
第一种
import paramikodef remote_roslaunch(host, username, password, package, launch_file, args=""):"""远程执行roslaunch:param host: 远程PC的IP:param username: 远程PC的用户名:param password: 远程PC的密码:param package: ROS包名:param launch_file: launch文件名(不含.launch后缀):param args: 传递给launch文件的参数(如 "arg1:=value1 arg2:=value2")"""ssh = paramiko.SSHClient()ssh.set_missing_host_key_policy(paramiko.AutoAddPolicy())try:ssh.connect(host, username=username, password=password)# 构造roslaunch命令command = (f"source /opt/ros/noetic/setup.bash && "f"source ~/catkin_ws/devel/setup.bash && "f"roslaunch {package} {launch_file}.launch {args}")# 执行命令(非阻塞)stdin, stdout, stderr = ssh.exec_command(command, get_pty=True)print(f"已在 {host} 上启动 {package}/{launch_file}.launch")return ssh # 返回SSH连接,用于后续管理except Exception as e:print(f"SSH执行失败: {str(e)}")ssh.close()return None如果希望 roslaunch 在 SSH 断开后继续运行,使用 nohup:
command = ("nohup roslaunch {package} {launch_file}.launch {args} ""> /dev/null 2>&1 &"
)第二种
<machine> 标签:定义远程计算机的配置(IP、用户名、密码、环境加载脚本等)。ROS 的 roslaunch 工具会自动通过 SSH 在指定机器上启动节点。
<launch><!-- 定义远程机器 pc1 --><machine name="pc1" <!-- 逻辑名称(用于node的machine属性) -->address="192.168.1.101" <!-- 远程IP -->user="user" <!-- 用户名 -->password="pass" <!-- 密码(可选,建议用密钥替代) -->env-loader="/opt/ros/noetic/env.sh" <!-- 环境加载脚本 -->/><!-- 定义远程机器 pc2 --><machine name="pc2" address="192.168.1.102" user="user" password="pass" env-loader="/opt/ros/noetic/env.sh" /><!-- 在 pc1 上启动 node1 --><node machine="pc1" name="node1" pkg="your_pkg" type="node1"/><!-- 在 pc2 上启动 node2 --><node machine="pc2" name="node2" pkg="your_pkg" type="node2"/>
</launch>复用机器定义:用于模块化地定义和复用远程机器配置,并启动对应的节点。假设你有两台机器人(robot1 和 robot2),需要分别在它们上面启动相同的节点组(如导航、感知等),通过将主launch文件中定义机器配置,并引用子launch文件(定义节点逻辑),就可以实现同一个节点在不同机器上复用
<!-- 定义机器模板 -->
<group><!-- 定义一个名为robot1的远程机器 --><machine name="robot1" <!-- 逻辑名称(用于后续引用) -->address="192.168.1.101" <!-- 远程机器的IP地址 -->user="user" <!-- SSH登录用户名 -->env-loader="~/env.sh" <!-- 远程机器的环境加载脚本 -->/><!-- 包含另一个launch文件,并传递参数 --><include file="$(find your_pkg)/launch/robot_nodes.launch"><arg name="machine" value="robot1"/> <!-- 将machine名称传递给子launch文件 --></include>
</group>子launch文件内容示例如下:
<launch><!-- 接收从主文件传递的machine名称 --><arg name="machine"/><!-- 在指定的远程机器上启动节点 --><node machine="$(arg machine)" name="nav_node" pkg="your_pkg" type="nav.py"/><node machine="$(arg machine)" name="sensor_node" pkg="your_pkg" type="sensor.py"/>
</launch>比如下面的多机器并行启动,均使用同样的节点
<!-- main.launch -->
<launch><!-- 启动robot1 --><group><machine name="robot1" address="192.168.1.101" .../><include file="robot_nodes.launch"><arg name="machine" value="robot1"/></include></group><!-- 同时启动robot2 --><group><machine name="robot2" address="192.168.1.102" .../><include file="robot_nodes.launch"><arg name="machine" value="robot2"/></include></group>
</launch>3,命名冲突问题
有时在不同的PC端可能需要启动同一个功能包来分别完成对应的功能,这些功能包会发布同一个话题,但是所有设备都只有一个ROS Master,这时就会出现话题名冲突的问题和节点名冲突的问题,这时就要进行命名空间的隔离
通过为每台PC的节点分配独立命名空间,避免话题和节点冲突。如下所示
group结构加命名空间
<launch><!-- PC1节点放入 /PC1 命名空间 --><group ns="PC1"><node pkg="navigation_pkg" name="nav" type="nav_node" output="screen"></node></group>
</launch><launch><!-- PC2节点放入 /PC2 命名空间 --><group ns="PC2"><node pkg="sim_navigation_pkg" name="nav" type="nav_node" output="screen"></node></group>
</launch>node加命名空间
<launch><!-- 定义 PC2 --><machine name="pc2" address="192.168.1.102" user="user" password="pass" env-loader="/opt/ros/noetic/env.sh" <!-- PC2 的环境脚本 -->/><!-- 定义 PC3 --><machine name="pc3" address="192.168.1.103" user="user" env-loader="/opt/ros/noetic/env.sh" /><!-- 在 PC2 上运行 PC1 的节点 --><node machine="pc2" name="nav_node" pkg="navigation_pkg" type="nav_node" ns="pc2"/><!-- 在 PC3 上运行同一节点(通过命名空间隔离) --><node machine="pc3" name="nav_node" pkg="navigation_pkg" type="nav_node" ns="pc3"/>
</launch>这样输出话题时就会加一个前缀,如下所示
/pc2/cmd_vel
/pc3/cmd_vel
/pc2/odom
/pc3/odom如果无法修改命名空间,也可以重映射话题名称,但是话题如果很多的话这种方式就比较麻烦
<!-- PC1的Launch文件 -->
<node pkg="navigation_pkg" name="nav" type="nav_node"><remap from="cmd_vel" to="PC1_cmd_vel"/> <!-- PC1的控制话题 -->
</node><!-- PC2的Launch文件 -->
<node pkg="sim_navigation_pkg" name="nav" type="nav_node"><remap from="cmd_vel" to="PC2_cmd_vel"/> <!-- PC2的控制话题 -->
</node>二,跨设备通信
我们将各PC端连接到同一个ROS Master下之后,它们的话题服务等就都是一样的了,设备之间就可以同步发布话题,订阅话题等进行数据之间的交换,与一个PC端各节点之间订阅话题是一样的
以话题为例(服务一样)
PC1发布话题/cmd_vel
# PC1的节点
pub = rospy.Publisher('/cmd_vel', Twist, queue_size=10)PC2订阅同一话题
# PC2的节点
rospy.Subscriber('/cmd_vel', Twist, callback)三,工作空间同步
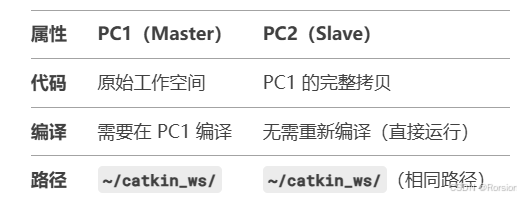
通过 rsync 将 PC1 的工作空间完整拷贝到 PC2。注意PC2 需安装与 PC1 相同版本的 ROS 和系统依赖(如 Ubuntu 20.04 + ROS Noetic)。
# 在 PC1 上执行(同步到 PC2)
rsync -avz ~/catkin_ws/ user@192.168.1.101:~/catkin_ws/rsync 会将 PC1 的 ~/catkin_ws/ 目录(包括源代码、编译生成的节点和消息)同步到 PC2 的相同路径下。PC2 的工作空间内容与 PC1 完全一致(包括编译后的可执行文件)。PC2 可以直接运行 功能包中的节点,无需重新编译。
# 在 PC1 上执行(将工作空间同步到 PC2)
rsync -avz --delete ~/catkin_ws/ user@192.168.1.101:~/catkin_ws/-
参数说明:
-
-a:归档模式(保留权限、符号链接等)。 -
-v:显示同步详情。 -
-z:压缩传输数据。 -
--delete:删除 PC2 上多余的文件(保持严格一致)。
-
如果 PC1 修改了代码,需重新运行 rsync 同步到 PC2,可以搭配 inotifywait 工具实现自动同步。
除此之外,也可以仅同步必要的功能包,如下:
rsync -avz ~/catkin_ws/src/navigation_pkg/ user@192.168.1.101:~/catkin_ws/src/navigation_pkg/
# 在 PC2 上单独编译该包:
cd ~/catkin_ws/ && catkin_make --pkg navigation_pkg