重庆公司专业建站百度seo快速排名优化服务
笔记来自计算机视觉life
IMU(Inertial Measurement Unit,惯性测量单元)是一种惯性传感器模块,用于测量物体的运动状态,包括加速度、角速度和(部分情况下)磁场强度。IMU通常由以下传感器组成:
- 加速度计:测量线性加速度,用于推算速度和位移。
- 陀螺仪:测量角速度,用于推算物体的旋转角度。
- 磁力计(可选):测量地磁场强度,用于推算航向角
IMU的工作原理基于惯性原理,通过测量加速度和角速度,可以推断物体的运动状态,包括位置、速度和姿态。IMU广泛应用于导航系统、无人机、机器人、虚拟现实设备等领域。
IMU和图像如何对齐
IMU和图像的对齐是多传感器融合中的重要步骤,通常包括以下两种方式:
- 时间戳对齐
时间戳对齐的目的是确保IMU数据和图像数据在时间上一致。由于IMU的采样频率通常高于图像传感器的帧率,可以通过以下方法实现对齐:
- 时间戳筛选:对于每个图像时间戳,筛选出最接近的IMU时间戳,并计算两者的时间误差。
- 增加IMU频率:提高IMU的采样频率,可以减小时间戳对齐的误差。
- 姿态对齐
姿态对齐的目的是将IMU的姿态信息与图像的姿态信息对齐,通常通过以下方法实现:
- 四元数插值:使用四元数插值(如Slerp方法)对IMU的姿态信息进行插值,使其与图像帧的姿态信息对齐。
- 传感器外参标定:通过标定IMU和相机之间的旋转矩阵和平移向量,确保两者的姿态信息一致。
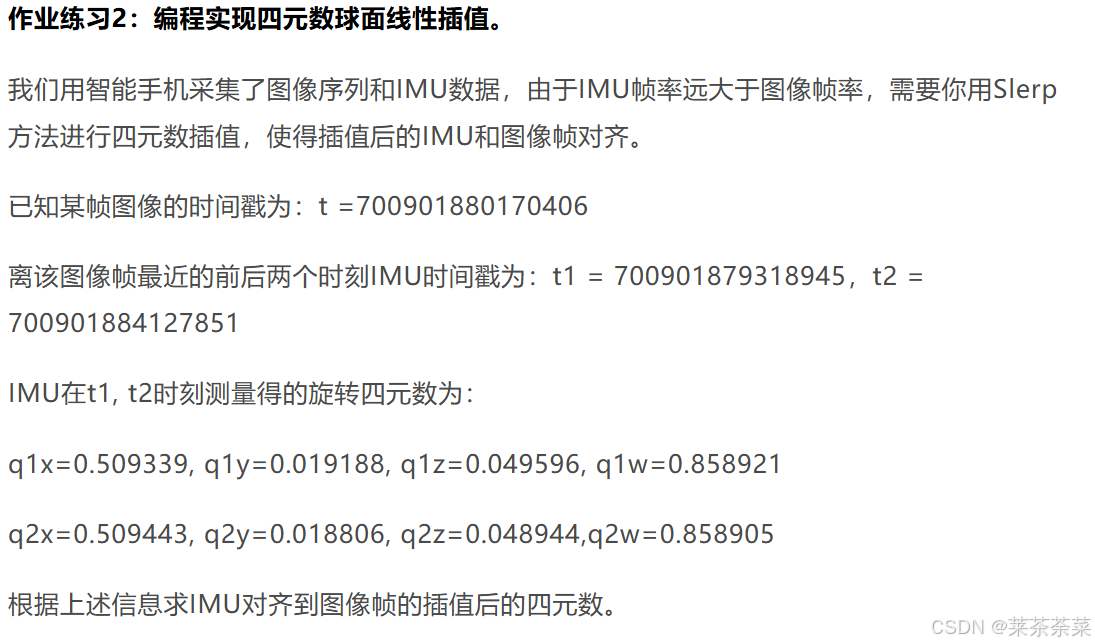
题目

看到这种题一般是两眼一黑的程度
做不来,告辞
#include <iostream>
#include <Eigen/Core>
#include <Eigen/Geometry>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
using namespace Eigen;// 四元数球面线性插值简化方法:v'=v1*cosθ' + v⊥*sinθ',原理见公众号推送文章
Quaterniond slerp(double t, Quaterniond &q1, Quaterniond &q2)
{// ---- 开始你的代码 ----- //// 计算时间参数double t1 = q1.w(), t2 = q2.w();double cos_theta = q1.dot(q2); // 计算两个四元数的点积double theta = acos(cos_theta); // 计算夹角double sin_theta = sin(theta); // 计算sin值// 如果两个四元数非常接近,直接返回q1if (sin_theta < 1e-6){return q1;}// 计算插值系数,t1_coeff 和 t2_coeff 是插值系数,它们分别对应于q0和q0^T的贡献。double t1_coeff = sin((1 - t) * theta) / sin_theta;double t2_coeff = sin(t * theta) / sin_theta;// 计算插值后的四元数Quaterniond q_slerp = q1 * t1_coeff + q2 * t2_coeff;return q_slerp;// ---- 结束你的代码 ----- //
}int main(int argc, char** argv)
{double t_img(700901880170406), t1_imu(700901879318945), t2_imu(700901884127851);Quaterniond q1(0.858921, 0.509339, 0.019188, 0.049596); // 注意四元数的构造顺序是(w, x, y, z)Quaterniond q2(0.858905, 0.509443, 0.018806, 0.048944);// 计算插值参数tdouble t = (t_img - t1_imu) / (t2_imu - t1_imu);Quaterniond q_slerp = slerp(t, q1, q2);cout << "插值后的四元数:q_slerp =\n" << q_slerp.coeffs() << endl; // coeffs的顺序是(x,y,z,w)return 0;
}