仁怀哪儿做网站宁波网站建设推广公司价格
目录
1. 找到串口号
2. 修改串口权限
3. 串口类
3.1 serialport.hpp
3.2 serialport.cpp
3.2.1 构造函数
3.2.2 Open函数
3.2.3 Close函数
3.2.4 Write函数
3.2.5 Read函数
3.2.6 SetFlowCtrl函数
4. 测试程序
5. 编译
6. 运行验证
除了默认的UART用于shell,Zero 3的24pin接口还有一路UART5:
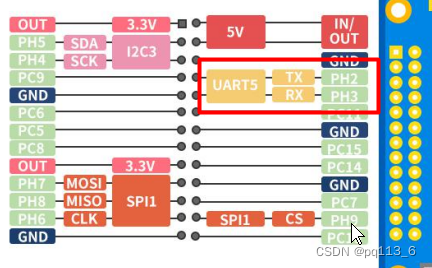
将这个脚用线短路起来测试,即红色排针(2个5V接口)那排排针往下数4-5脚短路。
1. 找到串口号
可以在shell中运行命令:
1|apollo-p2:/ $ ls -l /dev/tty*查看系统本身的串口信息:
crw-rw-rw- 1 root root 5, 0 1970-01-01 08:00 /dev/tty
crw------- 1 root root 247, 0 1970-01-01 08:00 /dev/ttyAS0
crw-rw---- 1 bluetooth net_bt_admin 247, 1 1970-01-01 08:00 /dev/ttyAS1
crw------- 1 root root 247, 5 1970-01-01 08:00 /dev/ttyAS5
crw-rw---- 1 bluetooth net_bt_admin 236, 0 2023-08-10 23:01 /dev/ttyBT0
crw------- 1 root root 236, 1 1970-01-01 08:00 /dev/ttyBT1
crw------- 1 root root 4, 64 1970-01-01 08:00 /dev/ttyS0
crw------- 1 root root 4, 65 1970-01-01 08:00 /dev/ttyS1
crw------- 1 root root 4, 66 1970-01-01 08:00 /dev/ttyS2
crw------- 1 root root 4, 67 1970-01-01 08:00 /dev/ttyS3从原理图上看,AS1对应UART1,标识也是bluetooth

猜测ttyAS5对应UART5,不过尝试读写ttyAS5提示权限不够。
apollo-p2:/ $ whoami
shell
apollo-p2:/ $ echo hello >/dev/ttyAS5
/system/bin/sh: can't create /dev/ttyAS5: Permission denied
1|apollo-p2:/ $ echo hello >/dev/tty
hello

修改权限也不行
127|apollo-p2:/ $ chmod 666 /dev/ttyAS5
chmod: chmod '/dev/ttyAS5' to 0666: Operation not permitted2. 修改串口权限
找到文件longan/kernel/linux-5.4/scripts/dtc/include-prefixes/arm64/sunxi/sun50iw9.dtsi
serial0 = &uart0;serial1 = &uart1;serial2 = &uart2;serial3 = &uart3;serial4 = &uart4;serial5 = &uart5;可以看到实际配置了6个Uart。说明不是这里配置。
进入Ubuntu文件系统,进入longan/kernel/linux-5.4文件夹,执行
make menuconfig在Device Drivers找一圈也没有找到配置。
尝试SELinux方式修改权限。
在device/softwinner/apollo/common/sepolicy/public/file_contexts添加:
/dev/ttyAS5 u:object_r:ttyAS5_device:s0这样改也不行。
在device/softwinner/apollo/common/system/init.sun50iw9p1.rc中添加修改权限命令:
on post-fs-data# create file for audio dump datamkdir /data/vendor/hardware/audio_d 0777 audio audiomkdir /data/audio_d 0777 media mediachown system system /dev/nsichmod 0660 /dev/nsichmod 0755 /product/bin/HelloWorldchmod 0666 /dev/ttyAS5apollo-p2:/ $ ls -l /dev/tty*
crw-rw-rw- 1 root root 5, 0 1970-01-01 08:00 /dev/tty
crw------- 1 root root 247, 0 1970-01-01 08:00 /dev/ttyAS0
crw-rw---- 1 bluetooth net_bt_admin 247, 1 1970-01-01 08:00 /dev/ttyAS1
crw-rw-rw- 1 root root 247, 5 1970-01-01 08:00 /dev/ttyAS5
crw-rw---- 1 bluetooth net_bt_admin 236, 0 2023-08-10 23:01 /dev/ttyBT0
crw------- 1 root root 236, 1 1970-01-01 08:00 /dev/ttyBT1
crw------- 1 root root 4, 64 1970-01-01 08:00 /dev/ttyS0
crw------- 1 root root 4, 65 1970-01-01 08:00 /dev/ttyS1
crw------- 1 root root 4, 66 1970-01-01 08:00 /dev/ttyS2
crw------- 1 root root 4, 67 1970-01-01 08:00 /dev/ttyS3可以看到已经改动了。
apollo-p2:/ $ echo hello </dev/ttyAS5
hello3. 串口类
参考上一节helloworld的方式(device/softwinner/apollo/apollo-p2)添加SerialPort的文件夹,在这个文件夹里面新增2个文件:serialport.cpp和serialport.hpp。
3.1 serialport.hpp
需要包含的头文件:
#include <stdio.h> /*标准输入输出定义*/
#include <stdlib.h> /*标准函数库定义*/
#include <unistd.h> /*Unix 标准函数定义*/
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h> /*文件控制定义*/
#include <errno.h> /*错误号定义*/
#include <termios.h> /*PPSIX 终端控制定义*/
#include <string.h>
增加类:
using namespace std;
class CSerialport
{private:int fd;const int baudrateSetting[14] = { B1000000, B576000, B500000, B460800, B230400, B115200, B57600, B38400, B19200, B9600, B4800, B2400, B1200, B300,};const int baudrate[14] = {1000000, 576000, 500000, 460800, 230400, 115200, 57600, 38400, 19200, 9600, 4800, 2400, 1200, 300, };public:CSerialport();bool Open(const char *dev); bool Open(const char *dev, int baud);bool Open(const char *dev, int baud, int databits, int stopbits, char parity);void Close(void);int Write(unsigned char *buf, int len); int Read(unsigned char *buf, int len); bool SetFlowCtrl(bool enable);
};- fd:串口的句柄。
- baudrateSetting :底层设置波特率的值,这些参数是底层驱动固定的值。
- baudrate:app层设置波特率的范围,和实际值一致。
- Open:打开串口设备,重载了3个函数,返回值都是true或false,参数的含义分别是
- dev:设备名,例如打开"/dev/ttyAS1", Open("/dev/ttyAS1")即可。
- baud:波特率,有效值看数组baudrate
- databits:数据位长度,有效值7或8,默认8。
- stopbits:停止位长度,有效值1或2,默认1。
- parity:校验方式,有效值'O'(奇校验)、'E'(偶校验)、'N'(无校验),默认'N'。
- Close:关闭串口设备
- Write:写数据到串口,buf表示缓冲,写出的数据,len表示数据长度,返回值为实际写出的数据长度,为-1时表示写错误发生。
- Read:从串口读数据,buf表示缓冲,读入的数据,len表示缓冲长度,返回值为实际读入的数据长度,为0则表示无数据。
- SetFlowCtrl:设置流控功能是否使能,参数enable为true时打开流控功能。返回true或false。
3.2 serialport.cpp
在cpp中实现类的成员函数。
需要包含的头文件:
#include "serialport.hpp"添加命名空间:
using namespace std;3.2.1 构造函数
CSerialport::CSerialport()
{fd = -1;
}初始化串口句柄为-1。
3.2.2 Open函数
这里重载了3个Open函数。
第一个只是打开,没有设置串口的其他关键参数。
bool CSerialport::Open(const char *dev)
{char* _dev=new char[256];strcpy(_dev, dev);fd = open(_dev, O_RDWR | O_NOCTTY | O_NDELAY);if (-1 == fd) { perror("Can't Open Serial Port\n");return false; }return true;
}
第二个是设置了波特率。
bool CSerialport::Open(const char *dev, int baud)
{struct termios options;int i;if(Open(dev) == false)return false; if (tcgetattr(fd, &options) != 0){perror("SetupSerial fail\n");return false;}//设置串口输入波特率和输出波特率 for (i = 0; i < (int)(sizeof(baudrate) / sizeof(int)); i++) {if (baud == baudrate[i]) {cfsetispeed(&options, baudrateSetting[i]); cfsetospeed(&options, baudrateSetting[i]); tcflush(fd, TCIFLUSH);if ((tcsetattr(fd, TCSANOW, &options)) != 0){perror("Serialport set error\n");return false;} return true; }}perror("Open Serial fail: baudrate is invalid\n");return false;
}
第三个函数包括设置串口的常用参数。
bool CSerialport::Open(const char *dev, int baud, int databits, int stopbits, char parity)
{struct termios options;int i;if (Open(dev) == false)return false; if (tcgetattr(fd, &options) != 0){perror("SetupSerial fail\n");return false;}bzero(&options, sizeof(options));for (i = 0; i < (int)(sizeof(baudrate) / sizeof(int)); i++) {if (baud == baudrate[i]) {cfsetispeed(&options, baudrateSetting[i]);cfsetospeed(&options, baudrateSetting[i]);break;}}options.c_cflag |= CLOCAL | CREAD;options.c_cflag &= ~CSIZE;switch (databits){case 7:options.c_cflag |= CS7;break;case 8:default:options.c_cflag |= CS8;break;}switch (parity){case 'O': //奇校验options.c_cflag |= PARENB;options.c_cflag |= PARODD;options.c_iflag |= (INPCK | ISTRIP);//printf("parity is Odd\n");break;case 'E': //偶校验options.c_iflag |= (INPCK | ISTRIP);options.c_cflag |= PARENB;options.c_cflag &= ~PARODD;//printf("parity is Even\n");break;case 'N': //无校验default:options.c_cflag &= ~PARENB;//printf("parity is None\n");break;}if (stopbits == 2){options.c_cflag |= CSTOPB;}else{options.c_cflag &= ~CSTOPB;}options.c_cc[VTIME] = 0;options.c_cc[VMIN] = 0;tcflush(fd, TCIFLUSH);if ((tcsetattr(fd, TCSANOW, &options)) != 0){perror("Serialport set error\n");return false;}return true;
}3.2.3 Close函数
void CSerialport::Close(void)
{if (-1 == fd){return;}close(fd);
}3.2.4 Write函数
int CSerialport::Write(unsigned char *buf, int len)
{ssize_t ret;ret = write(fd, buf, len);if(ret == -1)perror("Serialport send fail\n");return ret;
}3.2.5 Read函数
int CSerialport::Read(unsigned char *buf, int len)
{#define TimeOut 10 //if no data in 10ms, returnint retval;fd_set rfds;struct timeval tv;int ret, pos;tv.tv_sec = TimeOut / 1000; //set the rcv wait time tv.tv_usec = TimeOut % 1000 * 1000; //100000us = 0.1spos = 0;while (1){FD_ZERO(&rfds);FD_SET(fd, &rfds);retval = select(fd + 1, &rfds, NULL, NULL, &tv);if (retval == -1){perror("Serialport no data\n");break;}else if (retval){ret = read(fd, buf + pos, 1);if (-1 == ret){printf("Serialport read no data\n");break;}pos++;if (len <= pos){break;}}else{//printf("retval:%d\n", retval);break;}}return pos;
}读函数是在10ms内判断设备是否有数据,如果没数据就返回,如果有就继续读。宏定义TimeOut就是定义时间间隔,需要自己根据实际情况设定,一般情况10ms应该就够了。
3.2.6 SetFlowCtrl函数
bool CSerialport::SetFlowCtrl(bool enable)
{struct termios options;if (tcgetattr(fd, &options) != 0){perror("SetupSerial fail\n");return false;}if(enable == true){options.c_cflag |= CRTSCTS;}else{options.c_cflag &= ~CRTSCTS;}tcflush(fd, TCIFLUSH);if ((tcsetattr(fd, TCSANOW, &options)) != 0){perror("Serialport set error\n");return false;}return true;
}4. 测试程序
新建文件main.cpp
包含的头文件
#include "serialport.hpp"添加main函数
int main(int argc, char **argv)
{}定义一个串口类实体
CSerialport sp1;把main参数打印出来
int i = 0;
unsigned char buf[256];
int len = 0;
printf("The num of parameter:%d\n", argc);
for (i = 0; i < argc; i++)
{printf("%s\n", argv[i]);
}根据不同的参数个数调用Open函数
if(argc == 1)
{printf("Open default serial port: tty\n");sp1.Open("/dev/tty");
}
else if(argc == 2)
{printf("Open serial port:%s\n", argv[1]);sp1.Open(argv[1]);
}
else if(argc == 3)
{printf("Open serial port:%s, baudrate:%d\n", argv[1], atoi(argv[2]));sp1.Open(argv[1], atoi(argv[2]));
}
else if(argc == 6)
{printf("Open serial port:%s, baudrate:%d, data bits:%d, stop bits:%d, parity:%s\n", argv[1], atoi(argv[2]), atoi(argv[3]), atoi(argv[4]), argv[5]);sp1.Open(argv[1], atoi(argv[2]), atoi(argv[3]), atoi(argv[4]), argv[5]);
}写字符串
const char *wrData = "Serial Port Write String\n";
sp1.Write((unsigned char *)(wrData), strlen(wrData));因为此时串口的TxD和RxD是短路的, 此时可以读到写出去的字符串
usleep(50000);
len = sp1.Read(buf, 256);
if(len > 0)
{//buf[len] = 0;printf("Serial Read String:%s", buf);
}
elseprintf("Serial Read String Fail\n");注意需要delay一段时间再去读。
最后关闭设备
sp1.Close();
return 0;5. 编译
新建一个Android.bp文件。
cc_binary {name: "SerialPort",srcs: ["main.cpp","serialport.cpp"],product_specific: true
}在apollo_p2.mk里面添加SerialPort:
PRODUCT_PACKAGES += SerialPort在Ubuntun中运行lunch后执行:
mmm device/softwinner/apollo/apollo-p2/serialport/6. 运行验证
通过adb把生成的执行文件push到目标板中。
首先连接目标板:
adb connect 192.168.3.81:5555IP地址根据自己的板子地址修改。
将文件push到目标板:
adb root
adb remount
adb push out/target/product/apollo-p2/product/bin/SerialPort /product/bin然后adb shell,进入目标板的product/bin下运行:
apollo-p2:/product/bin # ./SerialPort /dev/ttyAS5 115200
The num of parameter:3
./SerialPort
/dev/ttyAS5
115200
Open serial port:/dev/ttyAS5, baudrate:115200
Serial Read String:Serial Port Write StringSerial Port Write String将RxD和TxD断开短路,接到一个USB转串口板子上验证。
apollo-p2:/ # ./product/bin/SerialPort /dev/ttyAS5 115200 8 1 N
The num of parameter:6
./product/bin/SerialPort
/dev/ttyAS5
115200
8
1
N
Open serial port:/dev/ttyAS5, baudrate:115200, data bits:8, stop bits:1, parity:N
Serial Read String Fail电脑上接收到字符串,由于没有发送数据到串口,所以显示Serial Read String Fail。