专门做讲座的英语网站营销号
在三维视觉领域,点云补全技术扮演着至关重要的角色。它旨在从部分或损坏的点云数据中恢复出完整的三维形状,这对于自动驾驶、机器人导航、文物保护等多个领域都具有重要意义。本文将深入探讨点云补全的原理、关键技术和实际应用示例。
点云补全的基本原理
点云补全的核心目标是从部分点云数据中恢复出完整的三维形状。这一过程涉及到以下几个关键步骤:
- 特征提取:从输入的点云数据中提取有用的特征。
- 数据增强:通过多尺度解码等技术增强点云数据。
- 损失函数设计:设计合适的损失函数来指导模型训练。
关键技术
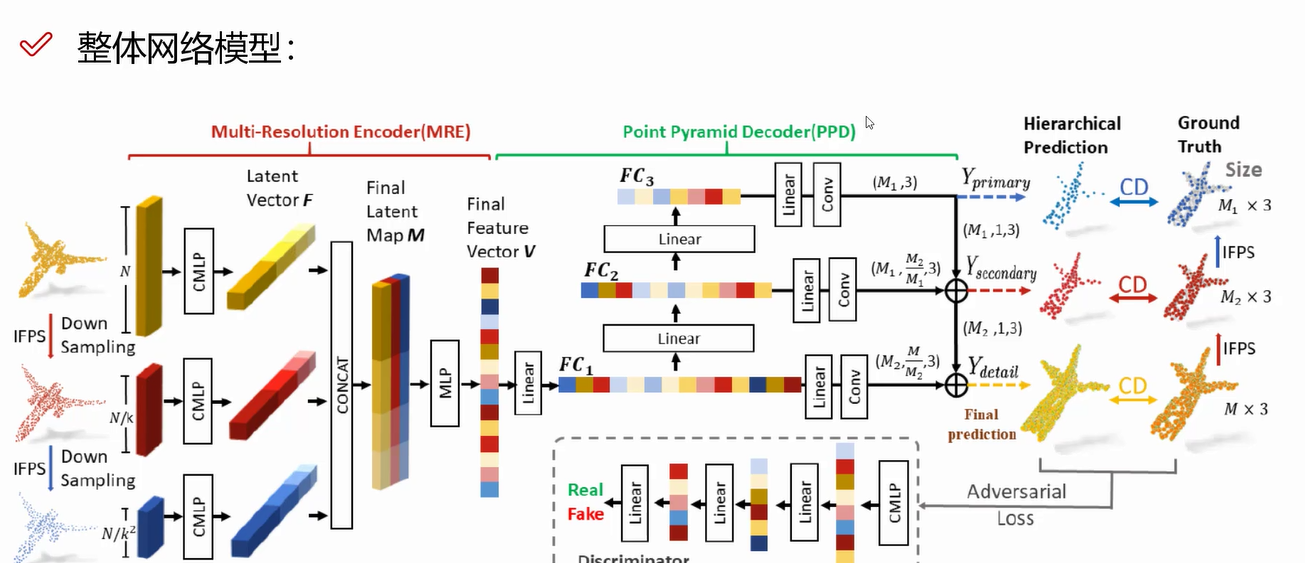
多分辨率编码器(MRE)
多分辨率编码器(MRE)是一种用于特征提取的网络模块,主要用于处理点云数据。MRE通过迭代最远点采样(FPS)对输入点云进行降采样,以获得更小尺度且更具有轮廓特征的点云。这种降采样过程使得MRE能够从局部点云及其低分辨率特征点中提取多层特征。
公式
MRE的输出可以表示为:
[ F = MRE ( P ) ] [ F = \text{MRE}(P) ] [F=MRE(P)]
其中,( P ) 是输入的点云数据,( F ) 是提取的特征。
点金字塔解码器(PPD)
点金字塔解码器(PPD)是一种用于生成点云的多尺度解码网络。其主要思想是监督每一阶段的点云,提升关键点的生成质量,并在关键点的基础上不断生成新的点云。PPD借鉴了图像处理中经典的SIFT算法,采用特征金字塔加粗样式的方式,对编码出的特征进行多尺度的解码,生成不同尺度的点云。
公式
PPD的输出可以表示为:
[ Y = PPD ( F ) ] [ Y = \text{PPD}(F) ] [Y=PPD(F)]
其中,( F ) 是从MRE提取的特征,( Y ) 是生成的点云。
损失函数
在点云补全中,常用的损失函数包括Chamfer Distance(CD)和Iterated傅里叶点采样(IFPS)。
Chamfer Distance(CD)
CD用于衡量两个点云之间的距离,其公式为:
[ C D ( S 1 , S 2 ) = 1 ∣ S 1 ∣ ∑ x ∈ S 1 min y ∈ S 2 ∥ x − y ∥ 2 + 1 ∣ S 2 ∣ ∑ y ∈ S 2 min x ∈ S 1 ∥ x − y ∥ 2 ] [ CD(S_1, S_2) = \frac{1}{|S_1|} \sum_{x \in S_1} \min_{y \in S_2} \|x - y\|^2 + \frac{1}{|S_2|} \sum_{y \in S_2} \min_{x \in S_1} \|x - y\|^2 ] [CD(S1,S2)=∣S1∣1x∈S1∑y∈S2min∥x−y∥2+∣S2∣1y∈S2∑x∈S1min∥x−y∥2]
其中,( S_1 ) 和 ( S_2 ) 是两个点云,( |x - y| ) 是点 ( x ) 和 ( y ) 之间的欧氏距离。
Iterated傅里叶点采样(IFPS)
IFPS用于评估点云的采样质量,其公式为:
[ I F P S ( S ) = ∑ x ∈ S ∑ y ∈ S 1 ∥ x − y ∥ 2 ] [ IFPS(S) = \sum_{x \in S} \sum_{y \in S} \frac{1}{\|x - y\|^2} ] [IFPS(S)=x∈S∑y∈S∑∥x−y∥21]
其中,( S ) 是点云,( |x - y| ) 是点 ( x ) 和 ( y ) 之间的欧氏距离。
实际应用示例
以下是一个使用PF-Net进行点云补全的示例。
示例代码
import torch
from PFNet import PFNet# 初始化模型
model = PFNet()# 加载部分点云数据
partial_point_cloud = torch.randn(1, 1024, 3)# 进行点云补全
completed_point_cloud = model(partial_point_cloud)# 可视化补全结果
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3Dfig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
ax.scatter(completed_point_cloud[:, 0], completed_point_cloud[:, 1], completed_point_cloud[:, 2])
plt.show()
示例结果
通过上述代码,我们可以得到补全后的点云数据,并使用matplotlib将其展示出来。这有助于我们直观地理解点云补全的效果。
结论
点云补全技术在三维计算机视觉领域具有广泛的应用前景。通过深入理解其原理、关键技术和实际应用示例,我们可以更好地利用这一技术来解决实际问题。随着研究的深入和技术的进步,点云补全技术将变得更加高效和准确。