如何做游戏网站大数据营销名词解释
PyTorch深度学习框架60天进阶学习计划 - 第25天:移动端模型部署(第一部分)
学习目标
- 使用TensorRT优化图像分类模型
- 实践INT8量化校准技术
- 测试Android端推理帧率提升效果
1. 移动端模型部署概述
深度学习模型在训练阶段通常运行在高性能GPU上,但在实际应用中,尤其是移动端设备,资源受限且对功耗敏感。因此,模型部署前的优化至关重要。今天我们将专注于使用NVIDIA的TensorRT工具优化PyTorch训练的图像分类模型,并测试其在Android设备上的性能提升。
1.1 移动端部署面临的挑战
| 挑战 | 描述 | 解决方向 |
|---|---|---|
| 计算资源有限 | 移动设备CPU/GPU性能弱于服务器 | 模型压缩、量化 |
| 内存限制 | RAM容量小,无法加载大模型 | 模型剪枝、蒸馏 |
| 功耗敏感 | 电池容量有限,需控制功耗 | 高效算法、硬件加速 |
| 多平台适配 | Android、iOS等平台差异大 | 跨平台框架、针对性优化 |
| 实时性要求 | 用户交互需低延迟 | 模型并行、流水线设计 |
1.2 常用移动端部署技术对比
| 技术 | 优势 | 劣势 | 适用场景 |
|---|---|---|---|
| TensorRT | 高性能、支持多精度、完整优化 | 仅支持NVIDIA设备、学习曲线陡 | 高性能设备、需要极致性能 |
| TensorFlow Lite | 跨平台支持好、工具链完整 | 优化不如TensorRT彻底 | 通用安卓设备部署 |
| ONNX Runtime | 兼容性强、支持多框架 | 优化程度中等 | 需要跨框架兼容性场景 |
| PyTorch Mobile | 与PyTorch无缝衔接、易用 | 性能较差、占用较大 | 快速原型验证、简单场景 |
| NCNN | 超轻量级、专为移动优化 | API不友好、生态较小 | 极度轻量的场景 |
2. TensorRT基础
2.1 什么是TensorRT?
TensorRT是NVIDIA提供的高性能深度学习推理优化器,能显著提升GPU上的推理性能。其核心优势包括:
- 网络优化:层融合、去除不必要的重排、优化内存使用
- 精度校准:支持FP32、FP16、INT8多种精度模式
- 动态张量内存:最小化内存占用
- 多流执行:支持并行处理多个输入流
- 多精度支持:平衡精度和性能
2.2 TensorRT工作流程
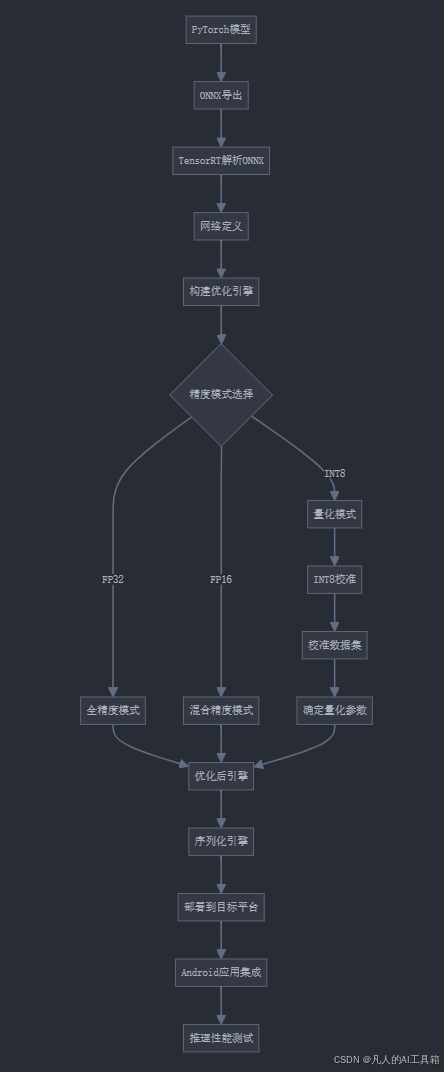
3. 从PyTorch到TensorRT的转换流程
3.1 环境准备
首先,我们需要设置正确的环境。以下是所需的主要组件:
# 安装必要的依赖
pip install torch torchvision onnx numpy Pillow pycuda
# 注意:TensorRT需要单独安装,不能通过pip安装
# 请从NVIDIA官网下载对应版本的TensorRT
3.2 PyTorch模型到ONNX的转换
ONNX (Open Neural Network Exchange) 是一个开放格式,用于表示深度学习模型。它能够在不同框架间转换模型,是连接PyTorch和TensorRT的桥梁。
import torch
import torchvision.models as models
import osdef convert_to_onnx(model_name='resnet50', batch_size=1, opset_version=11):"""将PyTorch预训练的图像分类模型转换为ONNX格式Args:model_name: 模型名称,如'resnet50', 'mobilenet_v2'等batch_size: 推理时的批量大小opset_version: ONNX操作集版本Returns:onnx_path: 保存的ONNX模型路径"""print(f"正在转换{model_name}为ONNX格式...")# 加载预训练模型if model_name == 'resnet50':model = models.resnet50(pretrained=True)elif model_name == 'mobilenet_v2':model = models.mobilenet_v2(pretrained=True)elif model_name == 'efficientnet_b0':model = models.efficientnet_b0(pretrained=True)else:raise ValueError(f"不支持的模型: {model_name}")# 设置为评估模式model.eval()# 创建输入tensorinput_tensor = torch.randn(batch_size, 3, 224, 224)# 导出路径onnx_path = f"{model_name}.onnx"# 导出为ONNX格式torch.onnx.export(model, # 要转换的模型input_tensor, # 模型输入onnx_path, # 输出文件路径export_params=True, # 存储训练后的参数权重opset_version=opset_version,# ONNX算子集版本do_constant_folding=True, # 是否执行常量折叠优化input_names=['input'], # 输入名称output_names=['output'], # 输出名称dynamic_axes={ # 动态尺寸支持'input': {0: 'batch_size'},'output': {0: 'batch_size'}})# 验证ONNX模型import onnxonnx_model = onnx.load(onnx_path)onnx.checker.check_model(onnx_model)print(f"模型已成功转换并保存到 {onnx_path}")print(f"模型输入: {onnx_model.graph.input}")print(f"模型输出: {onnx_model.graph.output}")return onnx_pathif __name__ == "__main__":# 可选模型: resnet50, mobilenet_v2, efficientnet_b0model_name = "mobilenet_v2"onnx_path = convert_to_onnx(model_name=model_name, batch_size=1)print(f"ONNX模型已保存到: {onnx_path}")
3.3 ONNX到TensorRT引擎的转换
一旦我们有了ONNX格式的模型,下一步就是使用TensorRT将其优化并创建推理引擎。
import os
import sys
import tensorrt as trt
import pycuda.driver as cuda
import pycuda.autoinit
import numpy as np
import timeclass ONNXtoTensorRT:def __init__(self):"""初始化TensorRT相关组件"""# 创建loggerself.logger = trt.Logger(trt.Logger.WARNING)# 创建构建器self.builder = trt.Builder(self.logger)# 创建网络定义self.network = self.builder.create_network(1 << int(trt.NetworkDefinitionCreationFlag.EXPLICIT_BATCH))# 创建配置对象self.config = self.builder.create_builder_config()# 解析器self.parser = trt.OnnxParser(self.network, self.logger)# 设置工作空间大小 (1GB)self.config.max_workspace_size = 1 << 30def build_engine_from_onnx(self, onnx_path, engine_path, precision="fp32"):"""从ONNX模型创建TensorRT引擎Args:onnx_path: ONNX模型路径engine_path: 输出引擎路径precision: 精度模式,可选 'fp32', 'fp16', 'int8'Returns:成功则返回True,否则返回False"""print(f"从ONNX模型构建TensorRT引擎,精度模式: {precision}")# 读取ONNX模型with open(onnx_path, "rb") as model:if not self.parser.parse(model.read()):print(f"ERROR: ONNX模型解析失败")for error in range(self.parser.num_errors):print(self.parser.get_error(error))return False# 设置精度模式if precision.lower() == "fp16" and self.builder.platform_has_fast_fp16:print("启用FP16模式")self.config.set_flag(trt.BuilderFlag.FP16)elif precision.lower() == "int8" and self.builder.platform_has_fast_int8:print("启用INT8模式")self.config.set_flag(trt.BuilderFlag.INT8)# INT8模式需要校准器,这里将在下一节中详细实现# 构建并序列化引擎print("构建TensorRT引擎中...")start_time = time.time()engine = self.builder.build_engine(self.network, self.config)build_time = time.time() - start_timeprint(f"引擎构建完成,耗时: {build_time:.2f}秒")if engine:with open(engine_path, "wb") as f:f.write(engine.serialize())print(f"TensorRT引擎已保存到: {engine_path}")return Trueelse:print("ERROR: 引擎构建失败")return Falsedef load_engine(self, engine_path):"""加载序列化的TensorRT引擎Args:engine_path: 引擎文件路径Returns:TensorRT引擎"""print(f"加载TensorRT引擎: {engine_path}")runtime = trt.Runtime(self.logger)with open(engine_path, "rb") as f:engine_data = f.read()engine = runtime.deserialize_cuda_engine(engine_data)if engine:print("引擎加载成功")return engineelse:print("ERROR: 引擎加载失败")return Nonedef infer(self, engine, input_data):"""使用TensorRT引擎进行推理Args:engine: TensorRT引擎input_data: 输入数据 (numpy数组)Returns:输出数据 (numpy数组)"""# 创建执行上下文context = engine.create_execution_context()# 分配内存h_input = cuda.pagelocked_empty(input_data.shape, dtype=np.float32)h_output = cuda.pagelocked_empty((input_data.shape[0], 1000), dtype=np.float32) # 假设输出是1000类# 将输入数据复制到主机内存np.copyto(h_input, input_data)# 分配设备内存d_input = cuda.mem_alloc(h_input.nbytes)d_output = cuda.mem_alloc(h_output.nbytes)# 创建CUDA流stream = cuda.Stream()# 将输入数据从主机内存复制到设备内存cuda.memcpy_htod_async(d_input, h_input, stream)# 执行推理bindings = [int(d_input), int(d_output)]context.execute_async_v2(bindings=bindings, stream_handle=stream.handle)# 将输出数据从设备内存复制到主机内存cuda.memcpy_dtoh_async(h_output, d_output, stream)# 同步流stream.synchronize()return h_outputif __name__ == "__main__":# 示例用法converter = ONNXtoTensorRT()onnx_path = "mobilenet_v2.onnx"engine_path = "mobilenet_v2_fp32.trt"# 构建FP32精度引擎success = converter.build_engine_from_onnx(onnx_path=onnx_path,engine_path=engine_path,precision="fp32")if success:# 加载引擎engine = converter.load_engine(engine_path)# 准备输入数据input_data = np.random.rand(1, 3, 224, 224).astype(np.float32)# 运行推理start_time = time.time()output = converter.infer(engine, input_data)inference_time = time.time() - start_timeprint(f"推理完成,耗时: {inference_time*1000:.2f}毫秒")print(f"输出形状: {output.shape}")# 获取Top-5预测类别top5_indices = np.argsort(output[0])[-5:][::-1]print(f"Top-5预测类别索引: {top5_indices}")
4. INT8量化校准
4.1 INT8量化原理
INT8量化是一种将模型从FP32或FP16精度降低到INT8精度的技术。它通过将浮点权重和激活值映射到8位整数范围内,能显著减少内存占用和计算开销,加速推理过程。
INT8量化的主要步骤:
- 确定动态范围:分析权重和激活值的分布,确定最大/最小值
- 缩放:通过缩放因子将FP32值映射到INT8范围(-128到127)
- 校准:使用代表性数据集校准量化参数
- 应用量化:使用校准参数进行真实推理
4.2 TensorRT INT8校准过程
要在TensorRT中应用INT8量化,需要实现一个校准器来收集网络中的激活统计信息:
import os
import numpy as np
import tensorrt as trt
import pycuda.driver as cuda
import pycuda.autoinit
from PIL import Image
import torchvision.transforms as transforms
from torch.utils.data import Dataset, DataLoader
import torchvision.datasets as datasets
import timeclass ImagenetCalibrationDataset(Dataset):"""ImageNet校准数据集加载器"""def __init__(self, calibration_dir, num_samples=100):"""初始化校准数据集Args:calibration_dir: 校准图像目录num_samples: 采样数量"""self.image_list = []# 查找所有图像文件for root, _, files in os.walk(calibration_dir):for file in files:if file.endswith(('.jpg', '.jpeg', '.png')):self.image_list.append(os.path.join(root, file))# 限制样本数量self.image_list = self.image_list[:num_samples]# 图像预处理转换self.transform = transforms.Compose([transforms.Resize(256),transforms.CenterCrop(224),transforms.ToTensor(),transforms.Normalize(mean=[0.485, 0.456, 0.406],std=[0.229, 0.224, 0.225])])print(f"加载了{len(self.image_list)}张校准图像")def __len__(self):return len(self.image_list)def __getitem__(self, idx):img_path = self.image_list[idx]image = Image.open(img_path).convert('RGB')tensor = self.transform(image)return tensor.numpy()# 实现INT8校准器
class ImageNetEntropyCalibrator(trt.IInt8EntropyCalibrator2):"""ImageNet INT8熵校准器"""def __init__(self, calibration_dir, batch_size=8, num_samples=100, cache_file="calibration.cache"):"""初始化校准器Args:calibration_dir: 校准图像目录batch_size: 批量大小num_samples: 采样数量cache_file: 校准缓存文件路径"""super().__init__()self.cache_file = cache_fileself.batch_size = batch_size# 创建校准数据集dataset = ImagenetCalibrationDataset(calibration_dir, num_samples)self.dataloader = DataLoader(dataset, batch_size=batch_size,shuffle=True,num_workers=4)# 迭代器self.iterator = iter(self.dataloader)# 分配CUDA内存self.device_input = cuda.mem_alloc(batch_size * 3 * 224 * 224 * 4) # NCHW, FP32# 存储未使用批次self.batches = []for batch in self.dataloader:self.batches.append(batch)self.batch_idx = 0print(f"校准器已准备好,共{len(self.batches)}个批次")def get_batch_size(self):"""返回校准批次大小"""return self.batch_sizedef get_batch(self, names):"""获取下一批校准数据Args:names: 输入张量名称列表Returns:是否还有数据"""if self.batch_idx >= len(self.batches):return None# 获取当前批次batch = self.batches[self.batch_idx].astype(np.float32)# 如果批次不完整则填充if batch.shape[0] < self.batch_size:# 填充到完整批次padding = np.zeros((self.batch_size - batch.shape[0], 3, 224, 224), dtype=np.float32)batch = np.concatenate([batch, padding], axis=0)# 复制到GPUcuda.memcpy_htod(self.device_input, batch)self.batch_idx += 1return [self.device_input]def read_calibration_cache(self):"""读取校准缓存Returns:缓存数据或None"""if os.path.exists(self.cache_file):with open(self.cache_file, "rb") as f:return f.read()return Nonedef write_calibration_cache(self, cache):"""写入校准缓存Args:cache: 校准数据"""with open(self.cache_file, "wb") as f:f.write(cache)print(f"校准缓存已保存到{self.cache_file}")# 扩展ONNXtoTensorRT类以支持INT8校准
class ONNXtoTensorRTwithINT8(ONNXtoTensorRT):def build_engine_with_int8(self, onnx_path, engine_path, calibration_dir, batch_size=8, num_samples=100):"""使用INT8校准构建TensorRT引擎Args:onnx_path: ONNX模型路径engine_path: 输出引擎路径calibration_dir: 校准图像目录batch_size: 校准批次大小num_samples: 校准样本数量Returns:成功则返回True,否则返回False"""print(f"从ONNX模型构建INT8 TensorRT引擎")# 读取ONNX模型with open(onnx_path, "rb") as model:if not self.parser.parse(model.read()):print(f"ERROR: ONNX模型解析失败")for error in range(self.parser.num_errors):print(self.parser.get_error(error))return False# 启用INT8模式if self.builder.platform_has_fast_int8:print("启用INT8模式")self.config.set_flag(trt.BuilderFlag.INT8)# 创建校准器calibrator = ImageNetEntropyCalibrator(calibration_dir=calibration_dir,batch_size=batch_size,num_samples=num_samples,cache_file="calibration.cache")# 设置INT8校准器self.config.int8_calibrator = calibratorelse:print("警告: 平台不支持INT8,将回退到FP32")# 构建并序列化引擎print("构建TensorRT引擎中...")start_time = time.time()engine = self.builder.build_engine(self.network, self.config)build_time = time.time() - start_timeprint(f"引擎构建完成,耗时: {build_time:.2f}秒")if engine:with open(engine_path, "wb") as f:f.write(engine.serialize())print(f"INT8 TensorRT引擎已保存到: {engine_path}")return Trueelse:print("ERROR: 引擎构建失败")return Falseif __name__ == "__main__":# 此处需要有校准数据集,可以使用部分ImageNet验证集# 如果没有,可以创建一个临时目录存放几张图像calibration_dir = "calibration_images"if not os.path.exists(calibration_dir):os.makedirs(calibration_dir)print(f"请在{calibration_dir}目录下放置校准图像")# 示例用法converter = ONNXtoTensorRTwithINT8()onnx_path = "mobilenet_v2.onnx"engine_path = "mobilenet_v2_int8.trt"# 构建INT8精度引擎if os.path.exists(calibration_dir) and len(os.listdir(calibration_dir)) > 0:success = converter.build_engine_with_int8(onnx_path=onnx_path,engine_path=engine_path,calibration_dir=calibration_dir,batch_size=8,num_samples=100 # 使用100张图像进行校准)if success:print("INT8引擎构建成功")else:print(f"请在{calibration_dir}目录下放置校准图像后再运行")
4.3 量化校准的最佳实践
INT8量化校准是一个关键步骤,其质量直接影响最终模型的准确性。以下是一些最佳实践:
| 最佳实践 | 说明 |
|---|---|
| 校准数据集选择 | 使用能代表真实数据分布的样本,通常100-1000张图像即可 |
| 批次大小设置 | 较大的批次可加速校准过程,但需根据GPU内存调整 |
| 缓存校准结果 | 保存校准缓存文件,避免重复校准 |
| 校准算法选择 | TensorRT提供多种校准算法:熵校准器、分位数校准器等 |
| 预处理一致性 | 确保校准和推理时使用相同的预处理流程 |
| 观察精度下降 | 监控量化前后的精度,确保可接受的精度损失 |
5. 性能测试与比较
为了全面评估不同精度模式下的模型性能,我们将实现一个完整的性能测试框架:
import os
import time
import numpy as np
import tensorrt as trt
import pycuda.driver as cuda
import pycuda.autoinit
import torch
import torchvision.models as models
from PIL import Image
import torchvision.transforms as transforms
import matplotlib.pyplot as plt
import json
import pandas as pd
from tabulate import tabulateclass PerformanceTester:def __init__(self):"""初始化性能测试器"""self.logger = trt.Logger(trt.Logger.WARNING)# 图像预处理转换self.transform = transforms.Compose([transforms.Resize(256),transforms.CenterCrop(224),transforms.ToTensor(),transforms.Normalize(mean=[0.485, 0.456, 0.406],std=[0.229, 0.224, 0.225])])# ImageNet类别映射self.idx_to_class = self._load_imagenet_labels()def _load_imagenet_labels(self):"""加载ImageNet类别标签"""# 加载标签映射try:with open('imagenet_labels.json', 'r') as f:return json.load(f)except:# 如果文件不存在,返回简单的索引映射return {str(i): f"class_{i}" for i in range(1000)}def load_engine(self, engine_path):"""加载TensorRT引擎Args:engine_path: 引擎文件路径Returns:TensorRT引擎"""runtime = trt.Runtime(self.logger)with open(engine_path, "rb") as f:engine_data = f.read()engine = runtime.deserialize_cuda_engine(engine_data)if not engine:raise RuntimeError(f"引擎加载失败: {engine_path}")return enginedef prepare_input(self, image_path):"""准备模型输入Args:image_path: 图像路径Returns:处理后的输入张量"""image = Image.open(image_path).convert('RGB')tensor = self.transform(image)return tensor.numpy()def infer_tensorrt(self, engine, input_data, num_warmup=10, num_runs=100):"""使用TensorRT引擎进行推理并测量性能Args:engine: TensorRT引擎input_data: 输入数据 (numpy数组)num_warmup: 预热运行次数num_runs: 性能测试运行次数Returns:性能指标和推理结果"""# 创建执行上下文context = engine.create_execution_context()# 预留内存h_input = cuda.pagelocked_empty(input_data.shape, dtype=np.float32)h_output = cuda.pagelocked_empty((input_data.shape[0], 1000), dtype=np.float32)# 复制输入数据np.copyto(h_input, input_data)# 分配设备内存d_input = cuda.mem_alloc(h_input.nbytes)d_output = cuda.mem_alloc(h_output.nbytes)# 创建CUDA流stream = cuda.Stream()# 设置绑定bindings = [int(d_input), int(d_output)]# 预热print(f"进行{num_warmup}次预热推理...")for _ in range(num_warmup):cuda.memcpy_htod_async(d_input, h_input, stream)context.execute_async_v2(bindings=bindings, stream_handle=stream.handle)cuda.memcpy_dtoh_async(h_output, d_output, stream)stream.synchronize()# 性能测试print(f"执行{num_runs}次性能测试...")latencies = []for _ in range(num_runs):# 记录开始时间start_time = time.time()# 推理cuda.memcpy_htod_async(d_input, h_input, stream)context.execute_async_v2(bindings=bindings, stream_handle=stream.handle)cuda.memcpy_dtoh_async(h_output, d_output, stream)stream.synchronize()# 记录结束时间end_time = time.time()latencies.append((end_time - start_time) * 1000) # 转换为毫秒# 计算性能指标avg_latency = np.mean(latencies)min_latency = np.min(latencies)max_latency = np.max(latencies)p95_latency = np.percentile(latencies, 95)fps = 1000 / avg_latency# 获取输出结果output = h_output.copy()# 释放资源del contextreturn {"avg_latency_ms": avg_latency,"min_latency_ms": min_latency,"max_latency_ms": max_latency,"p95_latency_ms": p95_latency,"fps": fps,"output": output}def infer_pytorch(self, model_name, input_data, num_warmup=10, num_runs=100):"""使用PyTorch模型进行推理并测量性能Args:model_name: 模型名称input_data: 输入数据 (numpy数组)num_warmup: 预热运行次数num_runs: 性能测试运行次数Returns:性能指标和推理结果"""# 加载预训练模型if model_name == 'resnet50':model = models.resnet50(pretrained=True)elif model_name == 'mobilenet_v2':model = models.mobilenet_v2(pretrained=True)elif model_name == 'efficientnet_b0':model = models.efficientnet_b0(pretrained=True)else:raise ValueError(f"不支持的模型: {model_name}")# 设置为评估模式model.eval()# 确定设备device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')model = model.to(device)# 转换输入tensor_input = torch.from_numpy(input_data).to(device)# 预热print(f"进行{num_warmup}次预热推理...")with torch.no_grad():for _ in range(num_warmup):_ = model(tensor_input)# 性能测试print(f"执行{num_runs}次性能测试...")latencies = []output = Nonewith torch.no_grad():for _ in range(num_runs):# 记录开始时间start_time = time.time()# 推理output = model(tensor_input)# 同步GPUif device.type == 'cuda':torch.cuda.synchronize()# 记录结束时间end_time = time.time()latencies.append((end_time - start_time) * 1000) # 转换为毫秒# 计算性能指标avg_latency = np.mean(latencies)min_latency = np.min(latencies)max_latency = np.max(latencies)p95_latency = np.percentile(latencies, 95)fps = 1000 / avg_latency# 获取输出结果并转换为numpyoutput = output.cpu().numpy()return {"avg_latency_ms": avg_latency,"min_latency_ms": min_latency,"max_latency_ms": max_latency,"p95_latency_ms": p95_latency,"fps": fps,"output": output}def compare_results(self, pytorch_output, tensorrt_output, top_k=5):"""比较PyTorch和TensorRT的输出结果Args:pytorch_output: PyTorch推理结果tensorrt_output: TensorRT推理结果top_k: 比较Top-K结果Returns:比较结果"""# 获取Top-K预测pytorch_top_indices = np.argsort(pytorch_output[0])[-top_k:][::-1]tensorrt_top_indices = np.argsort(tensorrt_output[0])[-top_k:][::-1]# 检查Top-1是否匹配top1_match = pytorch_top_indices[0] == tensorrt_top_indices[0]# 计算Top-K准确率topk_match_count = len(set(pytorch_top_indices) & set(tensorrt_top_indices))topk_accuracy = topk_match_count / top_k# 计算输出差异l2_diff = np.sqrt(np.sum((pytorch_output - tensorrt_output) ** 2))return {"top1_match": top1_match,"topk_accuracy": topk_accuracy,"l2_diff": l2_diff,"pytorch_top_indices": pytorch_top_indices,"tensorrt_top_indices": tensorrt_top_indices,"pytorch_top_classes": [self.idx_to_class.get(str(idx), f"class_{idx}") for idx in pytorch_top_indices],"tensorrt_top_classes": [self.idx_to_class.get(str(idx), f"class_{idx}") for idx in tensorrt_top_indices]}def benchmark_and_compare(self, model_name, image_path, engines, num_runs=100):"""对比不同精度引擎的性能和准确性Args:model_name: 模型名称image_path: 测试图像路径engines: 引擎路径字典 {精度: 路径}num_runs: 测试运行次数Returns:基准测试结果"""# 准备输入数据input_data = self.prepare_input(image_path)input_batch = np.expand_dims(input_data, axis=0)results = {}# 运行PyTorch基准测试print(f"运行PyTorch基准测试...")results["pytorch"] = self.infer_pytorch(model_name, input_batch, num_runs=num_runs)# 运行不同精度TensorRT基准测试for precision, engine_path in engines.items():print(f"运行{precision} TensorRT基准测试...")engine = self.load_engine(engine_path)results[precision] = self.infer_tensorrt(engine, input_batch, num_runs=num_runs)# 比较输出结果comparison = self.compare_results(results["pytorch"]["output"], results[precision]["output"])results[precision].update({"comparison": comparison})# 汇总性能指标summary = self.summarize_results(results)return results, summarydef summarize_results(self, results):"""汇总基准测试结果Args:results: 基准测试结果字典Returns:汇总数据"""# 提取性能指标summary = {"framework": [],"avg_latency_ms": [],"min_latency_ms": [],"max_latency_ms": [],"p95_latency_ms": [],"fps": [],"speedup": [],"top1_match": [],"topk_accuracy": [],"l2_diff": []}# 添加PyTorch结果base_latency = results["pytorch"]["avg_latency_ms"]summary["framework"].append("PyTorch")summary["avg_latency_ms"].append(results["pytorch"]["avg_latency_ms"])summary["min_latency_ms"].append(results["pytorch"]["min_latency_ms"])summary["max_latency_ms"].append(results["pytorch"]["max_latency_ms"])summary["p95_latency_ms"].append(results["pytorch"]["p95_latency_ms"])summary["fps"].append(results["pytorch"]["fps"])summary["speedup"].append(1.0)summary["top1_match"].append("基准")summary["topk_accuracy"].append("基准")summary["l2_diff"].append(0.0)# 添加TensorRT结果for precision in [k for k in results.keys() if k != "pytorch"]:summary["framework"].append(f"TensorRT {precision}")summary["avg_latency_ms"].append(results[precision]["avg_latency_ms"])summary["min_latency_ms"].append(results[precision]["min_latency_ms"])summary["max_latency_ms"].append(results[precision]["max_latency_ms"])summary["p95_latency_ms"].append(results[precision]["p95_latency_ms"])summary["fps"].append(results[precision]["fps"])summary["speedup"].append(base_latency / results[precision]["avg_latency_ms"])summary["top1_match"].append("是" if results[precision]["comparison"]["top1_match"] else "否")summary["topk_accuracy"].append(f"{results[precision]['comparison']['topk_accuracy']*100:.1f}%")summary["l2_diff"].append(results[precision]["comparison"]["l2_diff"])return summarydef plot_performance(self, summary):"""可视化性能比较Args:summary: 汇总结果"""# 创建DataFramedf = pd.DataFrame(summary)# 设置图表样式plt.style.use('ggplot')# 创建图表fig, (ax1, ax2) = plt.subplots(1, 2, figsize=(15, 6))# 绘制延迟比较图x = np.arange(len(df["framework"]))ax1.bar(x, df["avg_latency_ms"], color='skyblue')ax1.set_title('平均延迟比较')ax1.set_xlabel('框架/精度')ax1.set_ylabel('延迟 (ms)')ax1.set_xticks(x)ax1.set_xticklabels(df["framework"], rotation=45, ha='right')# 在条形上方添加数值标签for i, v in enumerate(df["avg_latency_ms"]):ax1.text(i, v + 0.1, f"{v:.2f}", ha='center')# 绘制FPS比较图ax2.bar(x, df["fps"], color='lightgreen')ax2.set_title('帧率 (FPS) 比较')ax2.set_xlabel('框架/精度')ax2.set_ylabel('FPS')ax2.set_xticks(x)ax2.set_xticklabels(df["framework"], rotation=45, ha='right')# 在条形上方添加数值标签for i, v in enumerate(df["fps"]):ax2.text(i, v + 0.1, f"{v:.2f}", ha='center')plt.tight_layout()plt.savefig('performance_comparison.png', dpi=300, bbox_inches='tight')plt.show()# 打印性能表格print("\n性能比较表格:")print(tabulate(df, headers='keys', tablefmt='grid', showindex=False))if __name__ == "__main__":# 测试示例tester = PerformanceTester()model_name = "mobilenet_v2"image_path = "test_image.jpg" # 替换为实际测试图像路径# 确保测试图像存在if not os.path.exists(image_path):# 如果测试图像不存在,创建一个随机图像用于测试print(f"未找到测试图像: {image_path},创建随机测试图像...")random_image = np.random.randint(0, 255, (224, 224, 3), dtype=np.uint8)random_pil = Image.fromarray(random_image)random_pil.save(image_path)# 定义要测试的引擎engines = {"FP32": f"{model_name}_fp32.trt","FP16": f"{model_name}_fp16.trt","INT8": f"{model_name}_int8.trt"}# 过滤掉不存在的引擎engines = {k: v for k, v in engines.items() if os.path.exists(v)}if not engines:print("未找到任何TensorRT引擎,请先运行转换脚本生成引擎文件")else:print(f"找到以下引擎文件: {list(engines.keys())}")# 执行基准测试results, summary = tester.benchmark_and_compare(model_name=model_name,image_path=image_path,engines=engines,num_runs=50 # 减少运行次数以加快测试)# 显示性能比较tester.plot_performance(summary)
6. Android端部署与优化
将TensorRT优化后的模型部署到Android设备上需要几个关键步骤。我们将使用TensorRT的Android库和JNI接口来实现高效的移动端推理。
6.1 Android集成架构
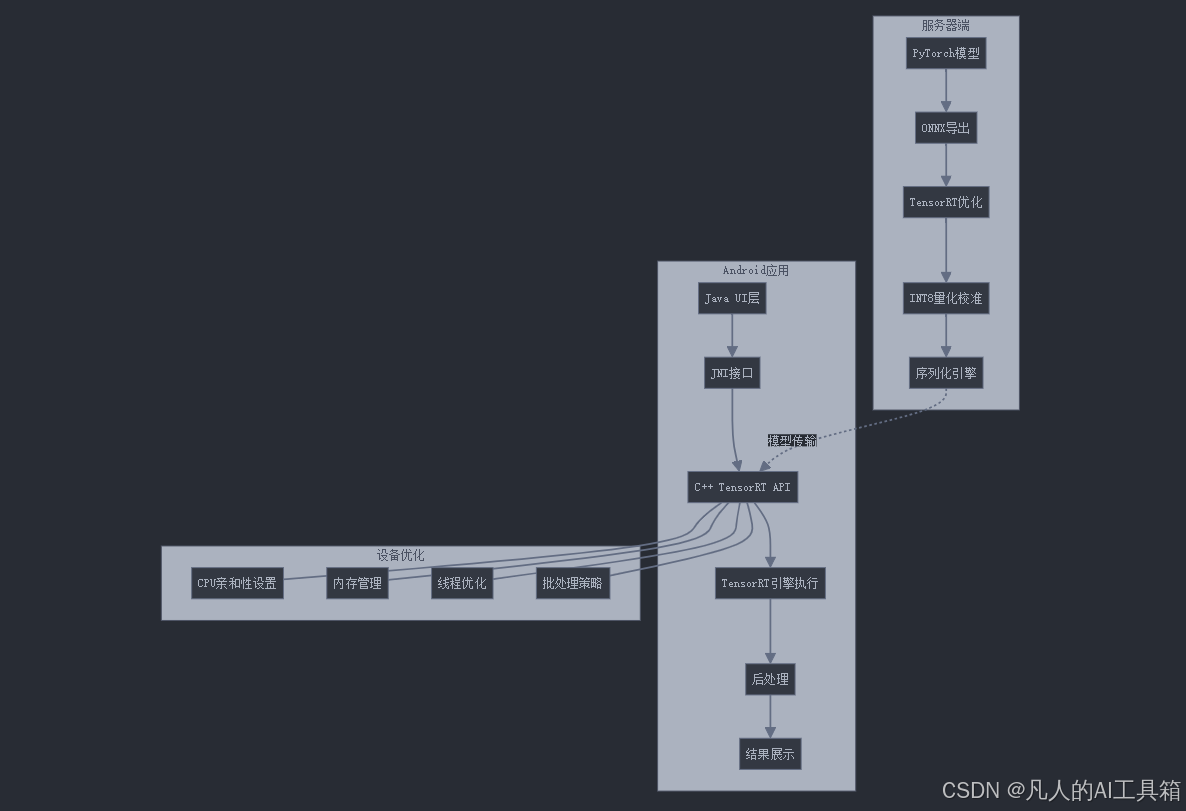
6.2 Android端TensorRT集成
以下是Android应用程序中集成TensorRT的核心步骤:
- 项目配置:在Android项目的build.gradle中添加必要的配置
- JNI接口设计:定义与C++层的接口
- C++实现:使用TensorRT API实现推理逻辑
- Java层调用:在Java/Kotlin中调用本地方法
6.2.1 Android项目配置
首先,在Android项目的app/build.gradle中添加以下配置:
// app/build.gradle
android {// ...其他配置...defaultConfig {// ...应用基本配置...// 启用CMake支持externalNativeBuild {cmake {cppFlags "-std=c++14"arguments "-DANDROID_STL=c++_shared"}}// 指定支持的ABIndk {abiFilters 'arm64-v8a', 'armeabi-v7a'}}// 配置CMakeexternalNativeBuild {cmake {path "src/main/cpp/CMakeLists.txt"version "3.18.1"}}// 配置资源目录,存放TensorRT引擎文件sourceSets {main {assets.srcDirs = ['src/main/assets']}}// ...其他配置...
}dependencies {// ...其他依赖...// 添加CameraX库用于相机访问implementation "androidx.camera:camera-camera2:1.1.0"implementation "androidx.camera:camera-lifecycle:1.1.0"implementation "androidx.camera:camera-view:1.1.0"// 添加图像处理库implementation 'com.github.bumptech.glide:glide:4.12.0'
}
6.2.2 CMake配置
接下来,创建CMakeLists.txt文件来配置C++构建:
cmake_minimum_required(VERSION 3.10.2)# 设置项目名
project("tensorrtdemo")# 设置TensorRT位置 (需要在设备上安装TensorRT或者自行编译)
set(TENSORRT_ROOT ${CMAKE_SOURCE_DIR}/src/main/cpp/tensorrt)# 添加TensorRT头文件路径
include_directories(${TENSORRT_ROOT}/include
)# 添加TensorRT库路径
link_directories(${TENSORRT_ROOT}/lib
)# 添加源文件
add_library(tensorrt_wrapperSHAREDsrc/main/cpp/tensorrt_wrapper.cppsrc/main/cpp/image_processor.cpp
)# 查找Android日志库
find_library(log-liblog
)# 链接库
target_link_libraries(tensorrt_wrapper# TensorRT库${TENSORRT_ROOT}/lib/libnvinfer.so${TENSORRT_ROOT}/lib/libnvinfer_plugin.so${TENSORRT_ROOT}/lib/libnvparsers.so${TENSORRT_ROOT}/lib/libnvonnxparser.so# CUDA库${TENSORRT_ROOT}/lib/libcudart.so${TENSORRT_ROOT}/lib/libcudnn.so# Android库${log-lib}jnigraphics
)# 设置C++标准
set_target_properties(tensorrt_wrapperPROPERTIESCXX_STANDARD 14CXX_STANDARD_REQUIRED YES
)
6.2.3 JNI接口实现
以下是C++层的TensorRT包装器实现:
#include <jni.h>
#include <string>
#include <vector>
#include <memory>
#include <android/log.h>
#include <android/bitmap.h>
#include <android/asset_manager.h>
#include <android/asset_manager_jni.h>
#include <NvInfer.h>
#include <NvOnnxParser.h>// 定义日志宏
#define LOG_TAG "TensorRTWrapper"
#define LOGD(...) __android_log_print(ANDROID_LOG_DEBUG, LOG_TAG, __VA_ARGS__)
#define LOGI(...) __android_log_print(ANDROID_LOG_INFO, LOG_TAG, __VA_ARGS__)
#define LOGE(...) __android_log_print(ANDROID_LOG_ERROR, LOG_TAG, __VA_ARGS__)// TensorRT Logger类
class Logger : public nvinfer1::ILogger {
public:void log(Severity severity, const char* msg) noexcept override {switch (severity) {case Severity::kINTERNAL_ERROR:LOGE("INTERNAL_ERROR: %s", msg);break;case Severity::kERROR:LOGE("ERROR: %s", msg);break;case Severity::kWARNING:LOGI("WARNING: %s", msg);break;case Severity::kINFO:LOGI("INFO: %s", msg);break;case Severity::kVERBOSE:LOGD("VERBOSE: %s", msg);break;default:LOGI("UNKNOWN: %s", msg);break;}}
} gLogger;// TensorRT引擎管理器
class TensorRTEngine {
private:// TensorRT组件nvinfer1::ICudaEngine* mEngine = nullptr;nvinfer1::IExecutionContext* mContext = nullptr;// 输入输出缓冲区void* mDeviceBuffers[2] = {nullptr, nullptr};void* mHostInputBuffer = nullptr;void* mHostOutputBuffer = nullptr;// 引擎参数int mInputIndex = -1;int mOutputIndex = -1;int mBatchSize = 1;int mInputH = 224;int mInputW = 224;int mInputC = 3;int mOutputSize = 1000; // 默认ImageNet分类数量// 清理资源void cleanup() {if (mContext) {mContext->destroy();mContext = nullptr;}if (mEngine) {mEngine->destroy();mEngine = nullptr;}if (mHostInputBuffer) {free(mHostInputBuffer);mHostInputBuffer = nullptr;}if (mHostOutputBuffer) {free(mHostOutputBuffer);mHostOutputBuffer = nullptr;}for (int i = 0; i < 2; i++) {if (mDeviceBuffers[i]) {cudaFree(mDeviceBuffers[i]);mDeviceBuffers[i] = nullptr;}}}public:TensorRTEngine() = default;~TensorRTEngine() {cleanup();}// 从文件加载引擎bool loadEngine(AAssetManager* assetManager, const std::string& engineFile) {cleanup();// 打开资产文件AAsset* asset = AAssetManager_open(assetManager, engineFile.c_str(), AASSET_MODE_BUFFER);if (!asset) {LOGE("Failed to open engine file: %s", engineFile.c_str());return false;}// 读取引擎数据size_t size = AAsset_getLength(asset);std::vector<char> engineData(size);AAsset_read(asset, engineData.data(), size);AAsset_close(asset);LOGI("Engine file size: %zu bytes", size);// 创建运行时和反序列化引擎nvinfer1::IRuntime* runtime = nvinfer1::createInferRuntime(gLogger);if (!runtime) {LOGE("Failed to create TensorRT Runtime");return false;}// 设置DLA核心(如果设备支持)// runtime->setDLACore(0);mEngine = runtime->deserializeCudaEngine(engineData.data(), size);runtime->destroy();if (!mEngine) {LOGE("Failed to deserialize CUDA engine");return false;}// 创建执行上下文mContext = mEngine->createExecutionContext();if (!mContext) {LOGE("Failed to create execution context");mEngine->destroy();mEngine = nullptr;return false;}// 获取输入输出索引mInputIndex = mEngine->getBindingIndex("input");mOutputIndex = mEngine->getBindingIndex("output");if (mInputIndex == -1 || mOutputIndex == -1) {LOGE("Invalid binding index found. Input: %d, Output: %d", mInputIndex, mOutputIndex);cleanup();return false;}// 获取输入维度auto inputDims = mEngine->getBindingDimensions(mInputIndex);mBatchSize = inputDims.d[0];mInputC = inputDims.d[1];mInputH = inputDims.d[2];mInputW = inputDims.d[3];// 获取输出维度auto outputDims = mEngine->getBindingDimensions(mOutputIndex);mOutputSize = outputDims.d[1];LOGI("Engine loaded. Input: %dx%dx%dx%d, Output: %d", mBatchSize, mInputC, mInputH, mInputW, mOutputSize);// 分配主机和设备内存size_t inputSize = mBatchSize * mInputC * mInputH * mInputW * sizeof(float);size_t outputSize = mBatchSize * mOutputSize * sizeof(float);// 分配主机内存mHostInputBuffer = malloc(inputSize);mHostOutputBuffer = malloc(outputSize);// 分配CUDA内存cudaMalloc(&mDeviceBuffers[mInputIndex], inputSize);cudaMalloc(&mDeviceBuffers[mOutputIndex], outputSize);return true;}// 执行推理bool infer(float* inputData, float* outputData) {if (!mContext || !mEngine) {LOGE("Engine not initialized");return false;}// 输入数据大小size_t inputSize = mBatchSize * mInputC * mInputH * mInputW * sizeof(float);size_t outputSize = mBatchSize * mOutputSize * sizeof(float);// 复制输入数据到主机缓冲区memcpy(mHostInputBuffer, inputData, inputSize);// 复制主机数据到设备cudaMemcpy(mDeviceBuffers[mInputIndex], mHostInputBuffer, inputSize, cudaMemcpyHostToDevice);// 执行推理bool status = mContext->executeV2(mDeviceBuffers);if (!status) {LOGE("Inference execution failed");return false;}// 复制结果回主机cudaMemcpy(mHostOutputBuffer, mDeviceBuffers[mOutputIndex], outputSize, cudaMemcpyDeviceToHost);// 复制结果到输出缓冲区memcpy(outputData, mHostOutputBuffer, outputSize);return true;}// 获取输入尺寸void getInputDims(int& batch, int& channels, int& height, int& width) const {batch = mBatchSize;channels = mInputC;height = mInputH;width = mInputW;}// 获取输出尺寸int getOutputSize() const {return mOutputSize;}
};// 全局引擎实例
static std::unique_ptr<TensorRTEngine> gEngine;// 图像处理函数(在image_processor.cpp中实现)
extern "C" {
extern void preprocessImage(const uint32_t* inputPixels, int width, int height, float* outputBuffer);
}// JNI方法实现
extern "C" {JNIEXPORT jboolean JNICALL
Java_com_example_tensorrtdemo_TensorRTWrapper_initTensorRT(JNIEnv* env,jobject thiz,jobject assetManager,jstring engineFile) {// 获取引擎文件名const char* engineFileName = env->GetStringUTFChars(engineFile, nullptr);// 获取资产管理器AAssetManager* mgr = AAssetManager_fromJava(env, assetManager);// 创建引擎实例if (!gEngine) {gEngine = std::make_unique<TensorRTEngine>();}// 加载引擎bool success = gEngine->loadEngine(mgr, engineFileName);// 释放字符串env->ReleaseStringUTFChars(engineFile, engineFileName);return static_cast<jboolean>(success);
}JNIEXPORT jfloatArray JNICALL
Java_com_example_tensorrtdemo_TensorRTWrapper_runInference(JNIEnv* env,jobject thiz,jobject bitmap) {if (!gEngine) {LOGE("TensorRT engine not initialized");return nullptr;}// 获取Bitmap信息AndroidBitmapInfo bitmapInfo;if (AndroidBitmap_getInfo(env, bitmap, &bitmapInfo) != ANDROID_BITMAP_RESULT_SUCCESS) {LOGE("Failed to get bitmap info");return nullptr;}// 检查Bitmap格式if (bitmapInfo.format != ANDROID_BITMAP_FORMAT_RGBA_8888) {LOGE("Bitmap format not supported: %d", bitmapInfo.format);return nullptr;}// 获取引擎输入尺寸int batchSize, channels, height, width;gEngine->getInputDims(batchSize, channels, height, width);// 锁定Bitmap像素void* bitmapPixels;if (AndroidBitmap_lockPixels(env, bitmap, &bitmapPixels) != ANDROID_BITMAP_RESULT_SUCCESS) {LOGE("Failed to lock bitmap pixels");return nullptr;}// 分配输入和输出缓冲区int inputSize = batchSize * channels * height * width;std::vector<float> inputBuffer(inputSize);// 预处理图像preprocessImage(static_cast<uint32_t*>(bitmapPixels), bitmapInfo.width, bitmapInfo.height, inputBuffer.data());// 解锁Bitmap像素AndroidBitmap_unlockPixels(env, bitmap);// 分配输出缓冲区int outputSize = gEngine->getOutputSize();std::vector<float> outputBuffer(outputSize);// 执行推理bool success = gEngine->infer(inputBuffer.data(), outputBuffer.data());if (!success) {LOGE("Inference failed");return nullptr;}// 创建Java浮点数组返回结果jfloatArray resultArray = env->NewFloatArray(outputSize);env->SetFloatArrayRegion(resultArray, 0, outputSize, outputBuffer.data());return resultArray;
}JNIEXPORT void JNICALL
Java_com_example_tensorrtdemo_TensorRTWrapper_destroyTensorRT(JNIEnv* env,jobject thiz) {// 释放引擎gEngine.reset();LOGI("TensorRT engine destroyed");
}JNIEXPORT jintArray JNICALL
Java_com_example_tensorrtdemo_TensorRTWrapper_getInputDims(JNIEnv* env,jobject thiz) {if (!gEngine) {LOGE("TensorRT engine not initialized");return nullptr;}// 获取输入尺寸int batchSize, channels, height, width;gEngine->getInputDims(batchSize, channels, height, width);// 创建并返回尺寸数组jintArray dimsArray = env->NewIntArray(4);jint dims[4] = {batchSize, channels, height, width};env->SetIntArrayRegion(dimsArray, 0, 4, dims);return dimsArray;
}}
清华大学全五版的《DeepSeek教程》完整的文档需要的朋友,关注我私信:deepseek 即可获得。
怎么样今天的内容还满意吗?再次感谢朋友们的观看,关注GZH:凡人的AI工具箱,回复666,送您价值199的AI大礼包。最后,祝您早日实现财务自由,还请给个赞,谢谢!