宁波网站建设zj95百度账户托管
文章目录
前言
4 安装 librealsense 和 pyrealsense2
4.1 安装 Python 软件包
4.2 如何运行
4.3 测试前的验证
前言
Realsense T265 通过 librealsense 支持 Windows 和 Linux 系统。不同系统的安装过程差异很大,因此请参阅 github 官方页面(the official github page),了解具体系统的安装说明:
4 安装 librealsense 和 pyrealsense2
Realsense T265 通过 librealsense 支持 Windows 和 Linux 系统。不同系统的安装过程差异很大,因此请参阅 github 官方页面(the official github page),了解具体系统的安装说明:
- Ubuntu
- Jetson (要获得 Python 封装器 pyrealsense2,需要从源代码编译)
- Odroid
- Windows
- Raspbian
对于运行 Ubuntu 的 RPi,librealsense 的安装过程已在此 wiki(this wiki) 中详细说明。请按照说明安装 librealsense 和 pyrealsense2。由于我们不使用 ROS,因此不需要安装 realsense-ros。
4.1 安装 Python 软件包
1. 建立串行连接: 通过 MAVLink 将 RPi 与 ArduPilot 连接(Connect RPi to ArduPilot with MAVLink)。
如果 RPi 与 ArduPilot 之间的连接是通过 UART 串口建立的,则还需更改 /boot/config.txt 中的设置(change the setting in /boot/config.txt)。
2. 安装 Python3(Install Python3)。
你可以使用 Python3 命令运行 ~/librealsense/wrappers/python/example 文件夹中英特尔提供的示例。
# Update the PYTHONPATH environment variable to add the path to the pyrealsense2 library
export PYTHONPATH=$PYTHONPATH:/usr/local/libcd ~/librealsense/wrappers/python/examples# You should see a stream of data coming from the T265.
python3 t265_example.py
3. 为 Python3 安装 pip (pip3)(Install pip for Python3 (pip3))。
4. 安装 Python 软件包:
# pip install may require sudo, so proceed accordingly
pip install pyrealsense2
python3 -m pip install transformations
python3 -m pip install dronekit
python3 -m pip install apscheduler
# Install serial packages for serial connection
sudo python3 -m pip install pyserial5. 下载脚本 t265_to_mavlink.py。如果你已经下载了 vision_to_mavros 软件包,则可在脚本文件夹中找到该脚本。
# Navigate to the location of the scripts
cd ~/path/to/the/script/
# Download the script if you haven’t already:
wget https://raw.githubusercontent.com/thien94/vision_to_mavros/master/scripts/t265_to_mavlink.py
chmod +x t265_to_mavlink.py4.2 如何运行
1. 在运行脚本之前,需要在 PYTHONPATH 环境变量中添加 pyrealsense2 库的路径。或者,将构建输出(librealsense2.so 和 pyrealsense2.so 位于 ~/librealsense/build/)复制到脚本旁边。首先,运行测试脚本 t265_test_streams.py,以验证 pyrealsense2 的安装和 T265 的连接。
# Update the PYTHONPATH environment variable to add the path to the pyrealsense2 library
export PYTHONPATH=$PYTHONPATH:/usr/local/lib
# Navigate to the location of the scripts
cd ~/path/to/the/script/
# Download and run a test script, you should see a short stream of pose data coming from the T265 on the terminal
wget https://raw.githubusercontent.com/thien94/vision_to_mavros/master/scripts/t265_test_streams.py
chmod +x t265_test_streams.py
python3 t265_test_streams.py2. 根据系统配置修改 t265_to_mavlink.py 脚本中的参数。最重要的是,找到并修改脚本中的以下参数:
# Default configurations for connection to the FCU
connection_string_default = '/dev/ttyUSB0'
connection_baudrate_default = 921600
# Default frequency for pose and confidence messages
vision_msg_hz_default = 30
confidence_msg_hz_default = 1
# Transformation to convert different camera orientations to NED convention. Replace camera_orientation_default for your configuration.
# 0: Forward, USB port to the right
# 1: Downfacing, USB port to the right
camera_orientation_default = 03. 这些参数也可以作为输入参数从命令行中传递。现在运行主脚本:
# For serial connection: set udev.rules in order to get the USB available; allow permission to serial
sudo chmod 666 /dev/ttyUSB0
# When everything is working and all defaults are set:
python3 t265_to_mavlink.py!Tip
查看所有可用输入参数: python3 t265_to_mavlink.py --help
4.3 测试前的验证
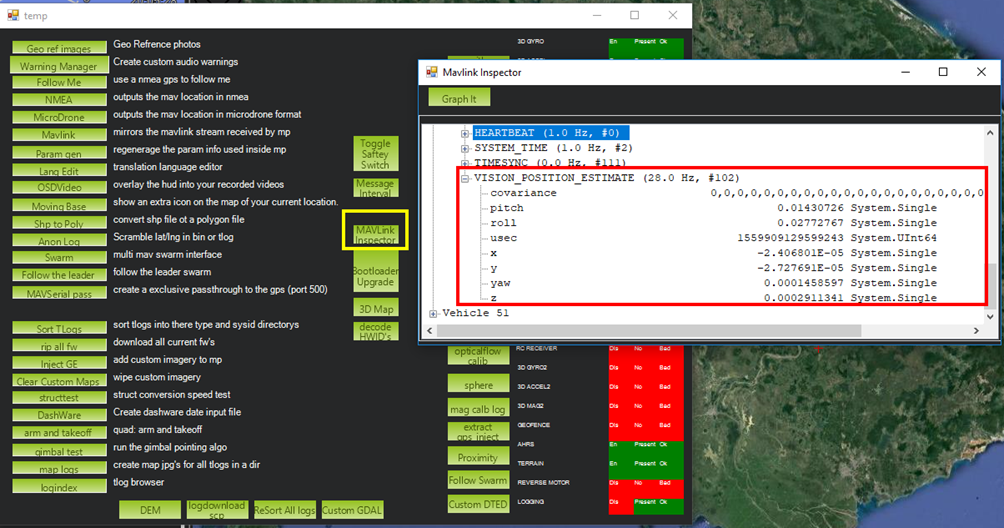
要验证 ArduPilot 是否接收到 VISION_POSITION_ESTIMATE 信息,请在任务计划器上:按下 Ctrl+F 并单击 “Mavlink 检查器”,你应该可以看到输入的数据。置信度可在信息 VISION_POSITION_DELTA(置信度字段)中查看。
跟踪置信度值的变化也可以通过任务规划器的信息面板、HUD 和语音通知。这些通知会在系统启动和置信度变为新状态(例如从 “中”变为 “高”)时弹出。
- 在任务规划器中启用语音: 选项卡 “配置/调谐”>“计划器”>“语音”>勾选 “启用语音”;
- 如果 HUD 上不断显示一些信息,你可能无法看到/听到置信度通知;
- 如果遥测速度较慢,通知可能会丢失。你仍可在 MAVLink Inspector 中看到最新信息 STATUSTEXT;
- 如果遥测速度很慢,可能会被 VISION_POSITION_ESTIMATE 信息淹没。你可以通过设置 SERIALx_OPTIONS 中的第 10 位来禁用信息转发。请注意,GCS 中将不再接收 VISION_POSITION_ESTIMATE。