苏州做公司网站成人短期技能培训
设计要求
驱动超声波传感器,启动距离测量功能,并将其结果显示到数码管上,距离数据单位为m。
按键“S4”定义为“切换”按键,通过此按键切换距离的显示精度(一位或两位小数)。切换顺序如图所示。
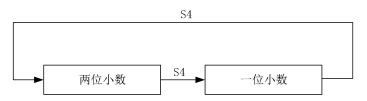
数码管显示格式如下图所示(数码管高位显示固定标识符“S”):

距离数据精度为两位小数

距离数据精度为一位小数
备注
单片机IRC振荡器频率设置为12MHz。
按键模式:BTN;扩展方式:IO模式。
上电测量的距离数据显示精度为两位小数字。
代码
sys.h
#ifndef __SYS_H__
#define __SYS_H__#include <STC15F2K60S2.H>
//sys.c
extern unsigned char UI;
extern float distance;
void init74hc138(unsigned char n);
void init();
//seg_key.c
void Key_Loop();
void Seg_Loop();
void seg_ui();#endifmain.c
#include "sys.h"
#include "intrins.h"
#define NUM 10
#define FNUM 8
sbit RX=P1^1;
sbit TX=P1^0;
bit flag1=0;
bit flag2=0;
bit flag3=0;
void Timer0_Isr(void) interrupt 1
{static unsigned char count1=0,count2=0;static unsigned int count3=0;count1++;count2++;count3++;if(count1==2){count1=0;flag1=1;}if(count2==50){count2=0;flag2=1;}if(count3==1000){count3=0;flag3=1;}
}
void Timer0_Init(void) //100微秒@12.000MHz
{AUXR &= 0x7F; //定时器时钟12T模式TMOD &= 0xF0; //设置定时器模式TL0 = 0x9C; //设置定时初始值TH0 = 0xFF; //设置定时初始值TF0 = 0; //清除TF0标志TR0 = 1; //定时器0开始计时ET0 = 1; //使能定时器0中断EA = 1;
}
void delay(){unsigned char i=NUM;while(i--){_nop_();}
}
void send_wave(){unsigned char i=FNUM;while(i--){TX=1;delay();TX=0;}
}
void re_wave(){send_wave();TH1=0;TL1=0;TR1=1;while((RX==1)&&(TF1==0));TR1=0;if(!TF1){distance=(float)(TH1<<8|TL1)*0.017;}else{TF1=0;distance=0.0;}
}
void main(){init();Timer0_Init();TMOD|=0x10;while(1){if(flag1){flag1=0;Seg_Loop();}if(flag2){flag2=0;Key_Loop();seg_ui();}if(flag3){flag3=0;re_wave();seg_ui();}}
}sys.c
seg_key.c
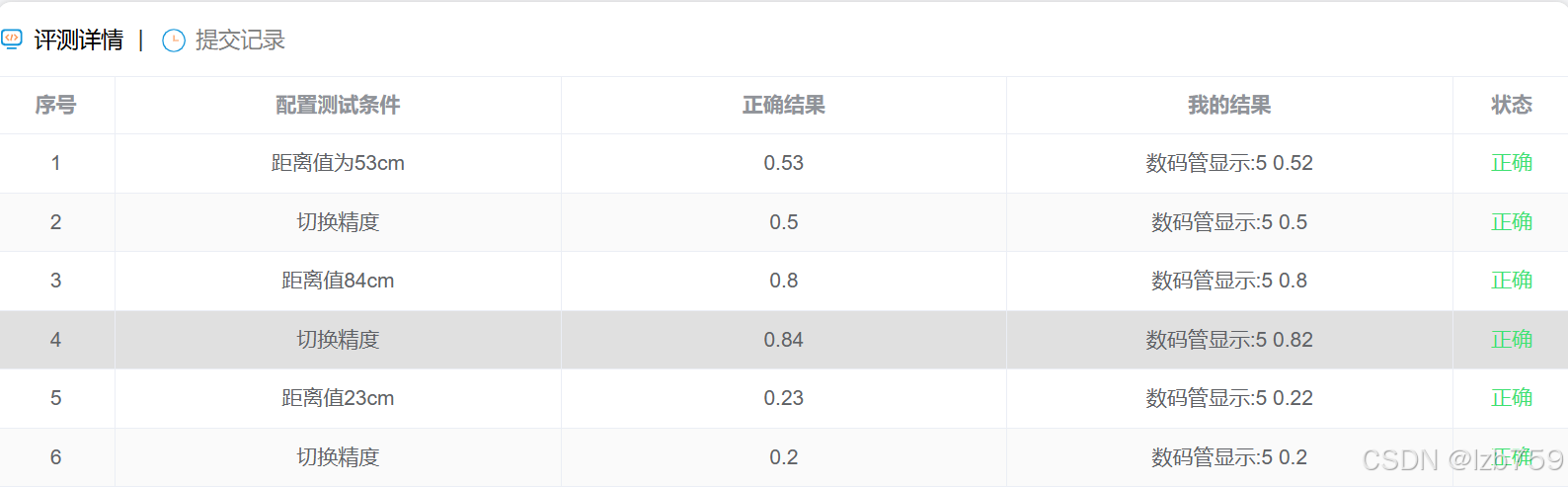
测评结果